Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Метод сканирования
|
|
Идея алгоритма перебора крайне проста. Вычисляют значения функции  в конечном числе точек
в конечном числе точек  области Dx (в узлах координатной сетки).Из вычисленных значений выбирают наименьшее (наибольшее)
области Dx (в узлах координатной сетки).Из вычисленных значений выбирают наименьшее (наибольшее)  . Координаты соответствующего узла сетки
. Координаты соответствующего узла сетки  – это координаты экстремума, определённые с точностью до
– это координаты экстремума, определённые с точностью до  , где – h шаг сетки (рис. 6.10).
, где – h шаг сетки (рис. 6.10).
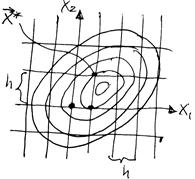
Рисунок 3.11 – Поиск оптимума на сетке переменных
Точность определения точки минимума, причем глобального, зависит от плотности наполнения области Dx дискретным множеством  , то есть от величины шага h координатной сетки, тем выше точность определения положения оптимума, однако при уменьшении h быстро растёт объём вычислений. Если интервал изменения каждой переменной разбить К равных частей, то h равно
, то есть от величины шага h координатной сетки, тем выше точность определения положения оптимума, однако при уменьшении h быстро растёт объём вычислений. Если интервал изменения каждой переменной разбить К равных частей, то h равно
 ,
, 
При этом необходимое количество вычислений I(x) равно
 .
.
Поэтому эффективное применение данного метода ограничивается задачами невысокой размерности (n=2-3). При большой размерности вектора  требуется выполнение большого объёма вычислительной работы.
требуется выполнение большого объёма вычислительной работы.
Пусть область Dx – геперкуб:
 ,
,
в котором ищется  .Точность определения координат вектора
.Точность определения координат вектора  , минимизирующего , положим равной 0,1. Тогда интервалы
, минимизирующего , положим равной 0,1. Тогда интервалы  следует разбить на 10 частей с шагом h=0,1 плоскостями, ортогональными
следует разбить на 10 частей с шагом h=0,1 плоскостями, ортогональными  и вычислить во всех точках перечисления плоскостей значения . Всего потребуется вычислить в 11n точках. Пусть для нахождения I в каждой точке требуется примерно 102n арифметических операций. Тогда общее число арифметических операций алгоритма перебора примерно 11(n+2)n и при n=10 на ЭВМ с быстродействием 109 oп/c требуется примерно 104 с, т.е. примерно 167 минут непрерывной работы ЭВМ.
и вычислить во всех точках перечисления плоскостей значения . Всего потребуется вычислить в 11n точках. Пусть для нахождения I в каждой точке требуется примерно 102n арифметических операций. Тогда общее число арифметических операций алгоритма перебора примерно 11(n+2)n и при n=10 на ЭВМ с быстродействием 109 oп/c требуется примерно 104 с, т.е. примерно 167 минут непрерывной работы ЭВМ.
Иногда поиск осуществляется с переменным шагом сканирования. Вначале величина h выбирается достаточно большой, выполняется грубый поиск для локализации экстремума, а поиск в районе оптимума осуществляется с меньшим шагом.
Достоинства метода – возможность определения глобального оптимума и независимость поиска от вида оптимизируемой функции.
3.3.2 Метод Гаусса-Зейделя
Метод Гаусса-Зейделя, называемый также методом покоординатного спуска, аналогичен методу релаксации. Отличие заключается лишь в том что, в этом методе не определяется осевое направление, вдоль которого значение  изменяется наиболее сильно. Поочерёдно изменяются все переменные.
изменяется наиболее сильно. Поочерёдно изменяются все переменные.
Алгоритм поиска минимума следующий. Пусть ищется минимум . Устанавливается очерёдность изменения –  и начальная точка
и начальная точка  поиска. Затем все переменные
поиска. Затем все переменные  фиксируются на уровне
фиксируются на уровне  ,
,  изменяется по алгоритму
изменяется по алгоритму
 ;
;  ;
;  ;
;  (3.22)
(3.22)
где  – шаг изменяется
– шаг изменяется  , обычно
, обычно  не зависит от k.
не зависит от k.
После каждого шага вычисляется , сравнивается с предыдущим значением, критерия шаги продолжаются до достижения частного оптимума по xj = x1. В этой точке величина  фиксируется и изменяется x2 до достижения оптимума по x2 и т.д. После того как достигается оптимум по последней переменной xn, снова изменяется x1 и весь цикл повторяется до тех пор, пока не будет найдена точка оптимума.
фиксируется и изменяется x2 до достижения оптимума по x2 и т.д. После того как достигается оптимум по последней переменной xn, снова изменяется x1 и весь цикл повторяется до тех пор, пока не будет найдена точка оптимума.
На рисунке 3.11 показан алгоритм поиска минимума для функции двух переменных.
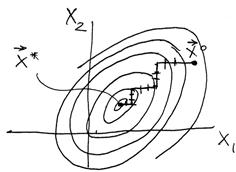
Рисунок 3.12 – Траектория движения к оптимуму в методе координатного спуска
Заметим что для функции двух переменных методы релаксации и Гаусса-Зейделя совпадают.
Если первый шаг изменения xj не улучшает значение критерия, т.е.
 , а
, а  , то выполняется шаг по xj в обратном направлении
, то выполняется шаг по xj в обратном направлении
 ,
,
т. е. Первый шаг пробный. Если и этот шаг неудачный, то переходят к изменению xj+1 и т.д.
Поиск заканчивают когда достигается точка  , из которой при движении в любом осевом направлении улучшение критерия не наблюдается.
, из которой при движении в любом осевом направлении улучшение критерия не наблюдается.
Рассмотрим вопрос улучшения алгоритма поиска  .
.
Пусть в области допустимых решений D задано нулевое приближение  .
.
Рассматриваем функцию при фиксированных значениях  как функцию одной переменной x1, т. е.
как функцию одной переменной x1, т. е.
 . (3.23)
. (3.23)
Минимизируя  находим значение
находим значение  , доставляющее минимум функцию (3.23):
, доставляющее минимум функцию (3.23):
 ;
;
 .
.
Далее при фиксированных значениях  рассматриваем
рассматриваем  как функцию одной переменной x2. Находим её минимум
как функцию одной переменной x2. Находим её минимум
 ;
;
 .
.
Продолжая эту процедуру последовательно, после n шагов получаем точку  , в которой выполняется условие
, в которой выполняется условие
 .
.
В результате одного шага покоординатного спуска происходит переход из начальной точки  в точку . Если при этом оказывается, что
в точку . Если при этом оказывается, что
 ,
,
то начальная точка  – точка, доставляющая минимум функцию .
– точка, доставляющая минимум функцию .
Если  ,то выполняется следующий шаг покоординатного спуска, в котором за начальную точку принимается
,то выполняется следующий шаг покоординатного спуска, в котором за начальную точку принимается  ,получаем
,получаем  и т.д. Этот процесс продолжается до тех пор пока не выполнится какое-либо условие окончания поиска, например такое
и т.д. Этот процесс продолжается до тех пор пока не выполнится какое-либо условие окончания поиска, например такое
 , (3.24)
, (3.24)
где  – заданная точность.
– заданная точность.
или
 (3.25)
(3.25)
Таким образом, поиск минимума функции одной переменной занимает центральное место в рассматриваемом алгоритме покоординатного спуска.
Простота метода и сравнительно небольшой объём вычислений обусловили его распространение в автоматических системах поиска.
Date: 2015-05-23; view: 1691; Нарушение авторских прав