Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Установка датчиков в приводах
|
|
Для измерения параметров движения какого-либо объекта в приводе датчик можно установить в разных местах. Встает вопрос: где именно расположить датчик, с каким звеном привода нужно связать его чувствительный элемент? Например, требуется измерять с высоким разрешением величину перемещения и точность позиционирования каретки в приводе, кинематическая схема которого изображена на рис. 7.8.
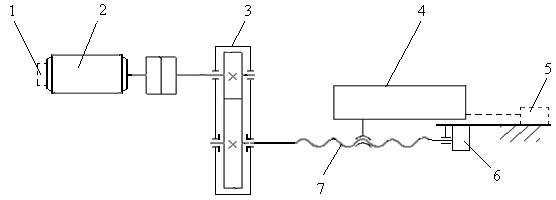
Рис. 7.8. Привод каретки:
1, 6 – датчики угловых перемещений; 2 – электродвигатель; 3 – редуктор;
4 – каретка; 5 – датчик линейных перемещений; 7 – ходовой винт
В данном приводе логичнее всего применить датчик линейных перемещений 5, а его чувствительный элемент (первичный преобразователь) соединить непосредственно с кареткой 4. Однако, это не всегда удобно, а иногда и вообще невозможно по ряду причин, а именно: датчики больших линейных перемещений с высокой разрешающей способностью дороги, громоздки, плохо компонуются и сложно соединяются с подвижным объектом. Поэтому рассматриваются другие варианты применения и установки датчика. Например, вместо датчика линейных перемещений применяют компактный и относительно дешевый датчик угловых перемещений, который соединяют с ходовым винтом 7 или с ротором двигателя 2. Если датчик 6 установить на винт 7, то угол поворота винта и соответственно ротора датчика
 (7.1)
(7.1)
где s – перемещение каретки;
u 1 – передаточное отношение между винтом и кареткой, u 1 >> 1;
t – шаг винта;
z – число заходов винта.
Если датчик 1 установить на двигатель 2, то угол поворота ротора двигателя и соответственно ротора датчика
 (7.2)
(7.2)
где u 2 – передаточное отношение редуктора, u 2 >> 1;
u – общее передаточное отношение механизма привода.
И в том и в другом случае между кареткой и датчиком присутствует механизм, который, с одной стороны, позволяет применить датчик угла вместо линейного датчика, а с другой стороны, механизм из-за геометрических неточностей, люфтов и деформаций создает дополнительную погрешность измерений.
При установке датчика на двигателе минимальное перемещение каретки, которое может зафиксировать датчик,
 (7.3)
(7.3)
где Dj – разрешающая способность датчика.
В этом случае при измерении перемещений разрешающая способность увеличивается благодаря механизму с высоким передаточным отношением u.
Точность работы привода характеризует погрешность позиционирования каретки
 (7.4)
(7.4)
где D1, D2, D3 – погрешность позиционирования каретки, определяемая погрешностью датчика, погрешностью редуктора и погрешностью передачи винт-гайка, соответственно
 (7.5)
(7.5)
где Dд – погрешность датчика;
Dр – погрешность редуктора, связанная, например, с зазорами деформациями в передачах;
Dв – погрешность передачи винт-гайка, связанная, например, с осевыми люфтами в гайке и опорах винта.
Таким образом, наличие механизма между датчиком и кареткой создает дополнительную погрешность привода D2 + D3 и эта погрешность тем больше, чем менее точен механизм. В данном случае наибольший вклад в погрешность позиционирования вносит механизм винт-гайка, поэтому этот механизм стараются сделать как можно точнее, например, используют ШВП.
Иногда, с целью увеличения чувствительности датчика без существенной потери точности измерений, датчик соединяют с объектом измерений специальной измерительной передачей, например, на основе зубчатых колес высокого класса точности.
Аналогично рассмотренному примеру существуют вопросы и при установке датчиков других типов: температуры, давления и др. Общее правило для этих датчиков следующее – чем «ближе» чувствительный элемент датчика расположен к объекту, параметры которого измеряются, чем меньше между объектом и чувствительным элементом промежуточных звеньев, тем точнее измеряются параметры объекта.
При использовании датчиков актуальны вопросы механического соединения датчика и объекта. Например, чем более плотно и жестко вибродатчик прикреплен к объекту, тем точнее будут его показания. Крепление тензорезистора к объекту также должно выполняться по специальной технологии.
При соединении с объектом датчиков, имеющих ротор, важно обеспечить точную передачу угла поворота от вала объекта к валу датчика. Такая точная передача угла возможна только при применении специальных соединительных муфт, у которых передаточное отношение u = 1 = const, специального крепления корпуса датчика и т. д.
Таким образом, при установке любого датчика на объект необходимо соблюдать определенные правила, которые часто оговариваются в технической документации конкретного датчика.
Date: 2015-09-24; view: 739; Нарушение авторских прав