Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Датчики приводов
|
|
Практически в любом приводе, вне зависимости от его типа и назначения, присутствуют датчики. Информация от датчиков в приводах используется для решения двух основных задач: управления приводом и контроля его состояния. Управление подразумевает регулировку или изменение режимов работы двигателя (включение и выключение, изменение скорости или момента), контроль необходим для безопасной и надежной работы (отсутствие перегрева, адекватная реакция на резкое изменение нагрузки и т.п.).
Используемые датчики можно классифицировать по различным признакам: виду входных и выходных сигналов, принципам действия и преобразования сигнала и др.
В зависимости от вида входной (измеряемой) величины различают датчики параметров движения (перемещений, скоростей, ускорений), датчики давления, температуры и пр., а по виду выходной величины - датчики электрические (тока, напряжения, частоты, сопротивления) и неэлектрические. В основном используются электрические датчики, что обеспечивает удобство и точность передачи и преобразования регистрируемых сигналов. Выходной сигнал в электрических датчиках может быть бинарным, аналоговым или цифровым. Бинарные датчики (выключатели) вырабатывают сигнал только двух уровней: "включено/выключено" (иначе говоря, 0 или 1, ON или OFF). Аналоговые датчики, в отличие от выключателей, дают непрерывный во времени сигнал, пропорциональный входной измеряемой величине. Цифровые датчики генерируют последовательность импульсов или двоичное слово с информацией о значении измеряемого сигнала.
По принципу преобразования сигнала датчики можно разделить на генераторные и параметрические. В генераторных датчиках входная величина преобразуется в электрический сигнал (ток, напряжение) непосредственно, а в параметрических датчиках - в изменение какого-либо электрического параметра (сопротивления, емкости, индуктивности).
По физическому принципу работы различают датчики омические, реостатные, фотоэлектрические (оптико-электронные), индуктивные, емкостные, магнитные и др.
Кроме того, датчики бывают контактными и бесконтактными. В первых чувствительный элемент непосредственно контактирует с контролируемым объектом, вторые работают без механического воздействия со стороны объекта.
Рассмотрим несколько примеров, поясняющих назначение датчиков в приводах.
В большинстве пневмоприводов поршень в пневмоцилиндре (рис. 7.1) перемещается от упора до упора, из одного крайнего положения в другое.

Рис. 7.1. Пневмоцилиндры с датчиками положения
При остановке поршня в крайнем положении устройство управления приводом должно получить сигнал о том, что поршень дошел до упора и остановился. Такой сигнал формируется датчиком положения, например магнитоуправляемым контактом. На гильзах цилиндров, выполненных из немагнитного материала, закрепляются два герметичных магнитоуправляемых контакта (геркона), фиксирующих два крайних положения поршня. Замыкает (или размыкает) эти контакты поле, создаваемое магнитом в виде кольца, закрепленном на поршне.
В пневмоприводах широко применяются датчики, называемые реле давления (рис. 7.2).

Рис. 7.2. Реле давления
Внутри реле содержит мембрану, которая прогибается под давлением воздуха и воздействует на выключатель. Выключатель имеет механизм, размыкающий электрические контакты при достижении заданного верхнего давления и замыкающий контакты, когда давление падает до заданного нижнего уровня. Верхнее и нижнее давление обычно задается человеком-оператором. Контакты реле коммутируют электрические цепи устройства управления давлением в пневматической системе привода.
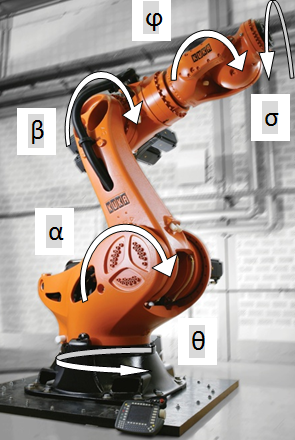
В промышленном роботе (ПР, рис. 7.3) движение по различным координатам (θ, α, β, φ, σ) осуществляет электропривод в режиме контурного управления. Контурный ПР используется в производственных процессах, когда необходимо обеспечить движение схвата с инструментом по определенной траектории, например, при нанесении покрытий, дуговой сварке, монтажно-сборочных работах, резке материалов, шлифовании. Траектория схвата определяется совместным движением по всем осям (степеням подвижности) робота. В рассматриваемом примере - вращением колонны (координата θ), плеча - a, предплечья - β, кисти - φ, схвата - σ.
| 
|
а б
Рис. 7.3. Контурный промышленный робот Bosch:
а – схема робота; б – датчик углового положения
В несколько упрощенном виде принцип управления движением робота выглядит следующим образом. В устройство управления заносится информация о координатах опорных точек и по определенному алгоритму рассчитывается непрерывная траектория между этими точками. Эта траектория декомпозируется (раскладывается) на согласованные во времени перемещения по отдельным осям (координатам). Можно сказать, что каждый привод должен «отработать» во времени t свою заданную траекторию, например, привод поворота колонны должен воспроизвести траекторию θ*(t).
К контурным ПР обычно предъявляются достаточно высокие требования по точности и быстродействию. Для их обеспечения используется следящая система, в состав которой наряду с объектом управления (колонной для степени θ) и приводом включаются также датчик обратной связи и устройство управления (рис. 7.4).
| Устройство управления |
| Привод колонны |
| Колонна |
| Датчик обратной связи |
| θ*(t) |
| u (t) |
| M (t) |
| θ(t) |
| θ^(t) |
Рис. 7.4. Структурная схема следящего привода
На основе информации о требуемом θ*(t) и реальном g(t) состоянии объекта управляющее устройство вычисляет сигнал управления u (t), а по нему привод формирует управляющее воздействие – момент M (t), поворачивающий колонну.
Это воздействие изменяет состояние (положение) объекта так, чтобы реальное значение соответствовало требуемому. В этой цепочке непременным звеном является датчик. В рассматриваемом примере датчик фиксирует угол поворота колонны манипулятора θ^(t). Этот сигнал непрерывно сравнивается с требуемым законом движения θ*(t). На основе рассогласования между этими сигналами формируется напряжение на двигатель привода, который поворачивает колонну так, чтобы свести рассогласование к минимуму.
Date: 2015-09-24; view: 2522; Нарушение авторских прав