Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Рычажные механизмы
|
|
Шарнирные четырехзвенники (рис. 6.10, а), кривошипно-ползунные (рис. 6.10, б) и кулисные механизмы (рис. 6.10, в) применяются в приводах машин для преобразования вращательного движения кривошипа в возвратно-качательное или возвратно-поступательное движение исполнительного звена.
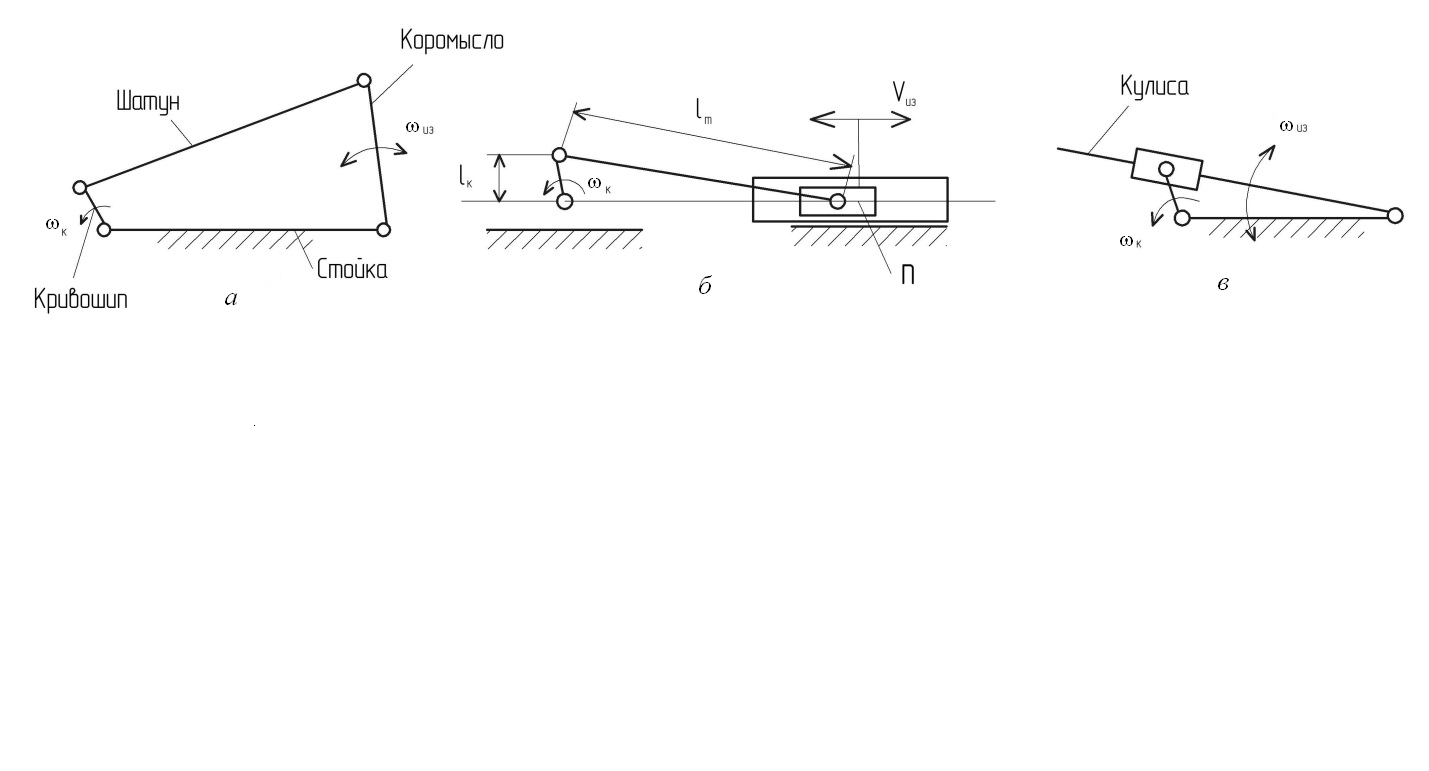
Рис. 6.10. Рычажные механизмы:
а – шарнирный четырехзвенник; б – кривошипно-ползунный механизм;
в – кулисный механизм
В этих механизмах закон движения исполнительного звена полностью зависит от геометрии механизма – соотношения длин звеньев, взаимного расположения опор. Например, если в механизме, изображенном на рис. 6.10, б, опора О лежит на линии движения ползуна П и длина l ш шатуна много больше длины l к кривошипа (l ш >> l к), закон движения ползуна будет близок к гармоническому. Закон движения не зависит от масштаба механизма – длин звеньев, важно лишь их соотношение. Истинные значения длин звеньев выбираются исходя из множества факторов, главными из которых являются компоновка, силы в кинематических парах и звеньях, жесткость и точность механизма, динамика механизма, колебательные явления, технологичность деталей и стоимость изготовления и т. д. Создание оптимального механизма – сложная многофакторная задача, как и большинство задач в механике.
Передаточные отношения в рычажных механизмах u = wк/wиз (схемы а, в) или u = wк/ V из (схема б) переменны, u ¹ const и является функцией угла поворота кривошипа u = fu (jк). Также переменен и КПД механизма, h = = f h(jк). Минимум КПД наблюдается в положениях механизма с неблагоприятной передачей сил, а именно при больших углах давления. Поэтому при синтезе механизмов необходимо стремиться к минимизации углов давления, изменяя геометрию механизма. Допустимыми обычно считаются углы давления порядка 30...40°.
Рычажные механизмы широко распространены в технике; от детских игрушек (танцующий Дед Мороз и т. п.) до мощных поршневых машин. Особенно распространен кривошипно-ползунный механизм (рис. 6.10, б). В поршневых двигателях этот механизм преобразует поступательное движение ползуна-поршня во вращательное движение кривошипа-коленчатого вала. В поршневых насосах и компрессорах - все наоборот.
Типовым во множестве машин является механизм, схема которого представлена на рис. 6.11. Это самое простое устройство для преобразования поступательного движения двигателя 2 во вращательное движение исполнительного звена 1. Угол качания звена 1 здесь ограничен из-за низкого КПД при больших углах давления.
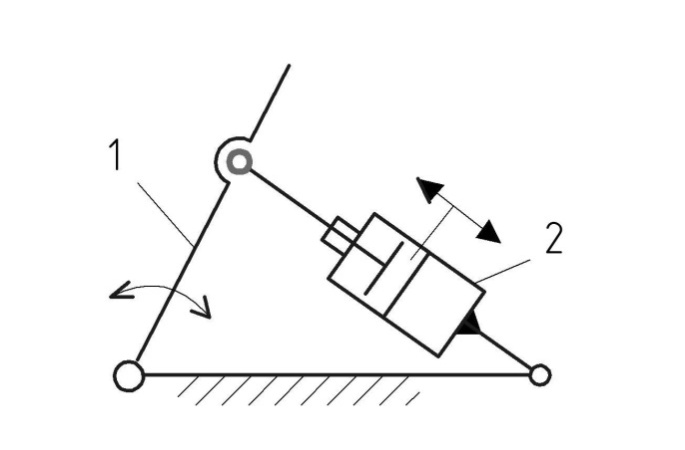
Рис. 6.11. Механизм для преобразования поступательного движения во вращательное:
1 - исполнительное звено – рычаг; 2 - двигатель (пневмоцилиндр, гидроцилиндр, соленоид и т. п.)
Date: 2015-09-24; view: 1368; Нарушение авторских прав