Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Механизмы с кулачком и копиром
|
|
Кулачковые механизмы широко востребованы в современных машинах, несмотря на все преимущества сервоприводов. Профилируя кулачок или копир, можно обеспечить самые разные законы движения толкателя с заданными параметрами перемещения, скорости, ускорения, градиента. Пожалуй, главным недостатком этих механизмов, по сравнению с сервоприводами, является сложность изменения закона движения. В механизме надо перепрофилировать кулачок или копир, в сервоприводе та же задача решается программным путем.
В рассматриваемых механизмах кулачок или копир могут вращаться (рис. 6.6, а, б) или двигаться поступательно (рис. 6.6, в) или быть неподвижными (рис. 6.6, г). Толкатель может совершать вращательное или поступательное движение по одной или нескольким координатам.
Замыкание механизма может быть силовое (рис. 6.6, а, в), путем прижатия ролика толкателя к профилю кулачка или копира силами веса или пружинами (растяжения, сжатия, кручения, пневмопружинами) или геометрическое (рис. 6.6, б, г, д), когда ролик толкателя перемещается по профильному пазу или два ролика взаимодействуют с двухдисковым кулачком.

Рис. 6.6. Механизмы с кулачком и копиром:
а – дисковый вращающийся кулачок и качающийся толкатель с силовым замыканием; б – торцевой вращающийся кулачок и качающийся толкатель с геометрическим замыканием; в – движущийся поступательно копир (кулачок) и качающийся толкатель с силовым замыканием; г – неподвижный копир и движущийся поступательно по двум координатам толкатель с геометрическим замыканием; д – двухдисковый вращающийся кулачок и качающийся толкатель с геометрическим замыканием
Силовое замыкание обеспечивает безударную работу механизма, но сила замыкания увеличивает контактные напряжения в паре кулачок-ролик. Геометрическое замыкание свободно от этого недостатка, но здесь ролик катится то по одной, то по другой стороне паза, имеют место микроудары и проскальзывания ролика из-за реверса его вращения.
Типовой, простейший закон движения толкателя – закон постоянных ускорений (рис. 6.7).
Здесь ускорения минимальны, но имеют место «мягкие» удары-скачки ускорений, которые вызывают колебательные процессы в быстроходных механизмах. В этом случае, например в механизме газораспределения двигателя автомобиля, применяют сложные законы, описываемые многостепенными полиномами. При этом исключают все виды ударов и минимизируют скорости, ускорения и более высокие производные перемещения.

Рис. 6.7. Перемещение, скорость и ускорение толкателя:
а – график перемещения поступательно движущегося толкателя в функции времени, S = f (t); б – график скорости, V = f (t); в – график ускорения, a = f (t)
Рассмотрим прямой ход толкателя, который обозначим как ход подъема. При заданных (например, технологическим процессом) величинах хода толкателя S п и времени подъема t п = t p + t т, где t p – время разгона, t т – время торможения, и при равных ускорениях при разгоне и торможении  имеем путь, пройденный при разгоне
имеем путь, пройденный при разгоне
 , (6.19)
, (6.19)
откуда ускорение при подъеме толкателя
 (6.20)
(6.20)
Максимальная скорость при подъеме толкателя
 (6.21)
(6.21)
Согласно геометрии кулачкового механизма (взаимное расположение опор, форма и размеры звеньев и т. п.), которая определяет передаточные отношения в механизме, и графику S = f (t) (рис. 6.7, а) вычисляются координаты профиля кулачка, составляется программа для станка с УЧПУ и изготавливается кулачок или копир.
При выборе геометрии механизма и профилировании кулачка важно обеспечить благоприятную, с высоким КПД, передачу сил от кулачка к толкателю, контактные давления в паре кулачок-ролик в пределах допускаемых давлений, требуемую жесткость механизма и точность движения толкателя. КПД механизма, в значительной степени, определяется углами давления γ в паре кулачок-ролик (рис. 6.8).

Рис. 6.8. Силы взаимодействия в паре кулачок-ролик
Угол давления - это угол между вектором силы F, действующей со стороны кулачка на ролик (сила F направлена по нормали к профилю кулачка) и вектором скорости V оси ролика. Силу F можно разложить на две составляющие. Полезной, движущей толкатель, составляющей является сила F дв. Чем меньше угол γ, тем больше F дв и меньше движущий момент M к на валу кулака при известном моменте сопротивления M т движению толкателя, следовательно, выше КПД. Угол γ при движении механизма не является величиной постоянной. Его максимум, обычно, стараются ограничить значением γmax = 20…40°.
Силы в звеньях кулачкового механизма и, соответственно, контактные давления, деформации, точность движения толкателя существенно зависят от размеров механизма. С одной стороны, стараются создать компактный, быстродействующий (с минимальными массами звеньев) механизм, с другой стороны, уменьшение размеров приводит к повышению сил в звеньях и кинематических парах. Создание оптимального кулачкового механизма - сложная многофакторная задача.
Кулачковые механизмы позволяют не только обеспечить привод какого-либо исполнительного звена (рабочего органа) машины, но и создать на их основе устройство управления машиной. Структура машины с таким устройством изображена на рис. 6.9.
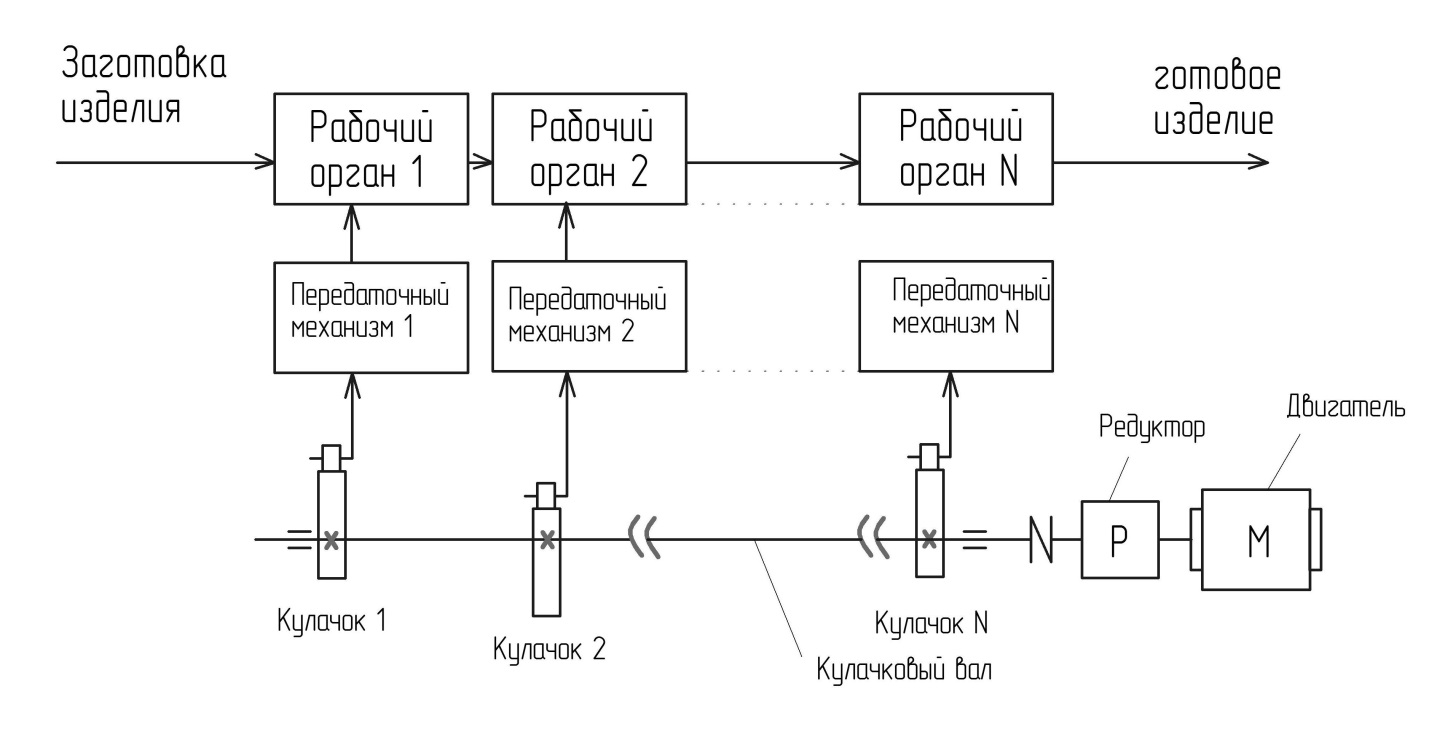
Рис. 6.9. Структура машины с кулачковыми механизмами
Здесь все рабочие органы машины получают движение от кулачковых механизмов. Кулачки посажены на кулачковый вал и развернуты друг относительно друга так, чтобы обеспечивалась необходимая последовательность движения рабочих органов. При этом законы движения определяются профилем кулачков. Таким образом, можно реализовать алгоритм (циклограмму) управления всеми рабочими органами машины. Важно отметить, что управление ведется по фазе - углу поворота кулачкового вала, поэтому алгоритм управления не зависит от скорости работы машины или показаний датчиков положения рабочих органов, как в других, не механических системах управления. В отличие от других устройств, здесь всегда обеспечивается синхронность движения рабочих органов машины.
Основными недостатками устройств управления, построенных на кулачковых механизмах, являются высокая сложность и, следовательно, стоимость механики машины, а также сложность в изменении алгоритма управления (нет «гибкости» управления). В настоящее время такие устройства применяются, в основном, в высокопроизводительных машинах-автоматах, например в роторных линиях, а также во всевозможных двигателях внутреннего сгорания.
Date: 2015-09-24; view: 1649; Нарушение авторских прав