Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Стандартные настройки
|
|
На рис. 6а показаны логарифмические частотные характеристики; цифрой "-1", обведенной кругом, обозначен наклон -20 дБ/дек, цифрой "-2" – наклон -40 дБ/дек. Там же показаны фазочастотные характеристики, из которых видно, что для настройки контура тока на МО запас по фазе при  составляет
составляет  . При ступенчатом управляющем воздействии (рис. 6б, кривая 1) выходная величина в первый раз достигает установившегося значения через время
. При ступенчатом управляющем воздействии (рис. 6б, кривая 1) выходная величина в первый раз достигает установившегося значения через время  , перерегулирование
, перерегулирование  , %, составляет 4.3 %. Длительность переходного процесса не зависит от постоянной времени объекта и определяется только значением малой постоянной времени.
, %, составляет 4.3 %. Длительность переходного процесса не зависит от постоянной времени объекта и определяется только значением малой постоянной времени.
Такой способ настройки и называется настройкой по модулю. Смысл этого термина в том, что при настройке на модульный оптимум стремятся в широкой полосе частот сделать модуль частотной характеристики замкнутого контура тока близким к единице [9].
При ступенчатом приращении возмущающего воздействия  отклонение выходной координаты зависит от соотношений параметров контура, но длительность и вид переходных процессов по возмущению определяется только соотношением постоянной времени объекта
отклонение выходной координаты зависит от соотношений параметров контура, но длительность и вид переходных процессов по возмущению определяется только соотношением постоянной времени объекта  , и малой постоянной времени контура. При
, и малой постоянной времени контура. При  переходный процесс будет соответствовать кривой 1 на рис. 6в.
переходный процесс будет соответствовать кривой 1 на рис. 6в.
В практике проектирования систем подчиненного управления электроприводами широкое применение находят стандартные настройки регулирования. Передаточная функция регулятора  :
:
 (16)
(16)
где  – коэффициент усиления регулятора;
– коэффициент усиления регулятора;
 – постоянная времени регулятора.
– постоянная времени регулятора.
Согласно [5], параметры регуляторов при стандартной настройке определяются следующим образом. Контур тока настраивается на модульный оптимум:
 ; (17)
; (17)
 ; (18)
; (18)
 (19)
(19)
где  – малая постоянная времени токового контура.
– малая постоянная времени токового контура.
 . (20)
. (20)
Передаточная функция разомкнутого КТ получится в виде:
 , (21)
, (21)
 .(22)
.(22)
 , (23)
, (23)
где  – электромеханическая постоянная времени, с;
– электромеханическая постоянная времени, с;
 . (24)
. (24)
Далее переходим к настройке контура скорости, неизменяемая часть которого  будет иметь вид:
будет иметь вид:
 . (25)
. (25)
где  – передаточная функция замкнутого контура тока.
– передаточная функция замкнутого контура тока.
 . (26)
. (26)
При настройке контура скорости на симметричный оптимум параметры регулятора скорости определяются по формулам:
 ; (27)
; (27)
 ; (28)
; (28)
 ; (29)
; (29)
где  – малая постоянная времени контура скорости;
– малая постоянная времени контура скорости;
 . (30)
. (30)
5. НАСТРОЙКА ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ С УЧЕТОМ УПРУГОСТИ
Для удобства все условия пренебрежения упругостью при анализе двухмассовой ЭМС сведены в табл. 2. При выполнении условий в табл. 2 можно пренебречь упругостью, а именно настроить двухмассовую систему на стандартнве настройки.
Возможность стандартной настройки контуров тока и скорости не означает, однако, еще возможности пренебрежения влиянием упругости на работу электромеханической системы, так как необходимо оценить характер изменения частоты вращения вала исполнительного органа. При выполнении условия 2 для контура скорости в характеристике  будут существовать высокочастотные колебания, амплитуда ко-
будут существовать высокочастотные колебания, амплитуда ко-
Таблица 2.Соотношения, обеспечивающие возможность пре
| № усл. | Условия определения соотношения парамет-ров (пред.условие) |
а) для контура тока
| – | |

| |

|
б) для контура скорости
| – | |
Условия 2 или 3 для КТ выполняются
 
| |
 3 3
|
Условия 2 или 3 для КТ выполняются

|
небрежения влиянием упругости при стандартных настройках
| № усл. | Требуемое соотношение параметров (требуемое условие) |

| |
| |

|
|
| |
| |
| 3
| 

|
торых невелика, но для обеспечения качества обработки металла может иметь существенное значение.
При выполнении условия 3 табл. 2. для контура скорости, как и при  ,колебания вала исполнительного механизма будут затухать лишь за счет внутреннего трения в передаче и на второй массе.
,колебания вала исполнительного механизма будут затухать лишь за счет внутреннего трения в передаче и на второй массе.
6. НАСТРОЙКА ДВУХМАССОВОЙ СИСТЕМЫ БЕЗ ПРИМЕНЕНИЯ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
Обычно наличие упругости приводит к необходимости снижать быстродействие системы. Если в жесткой системы предельное быстродействие определялось суммой малых постоянных времени, то в системе с упругостью оно зависит от постоянной времени упругих колебаний. Часто Тμω<<Ту, и при правильно выбранных настройках регуляторов малые постоянные времени не оказывают заметного влияния на переходные процессы. Поскольку вывод формул для расчета коэффициентов передачи регуляторов достаточно сложен и выходит за рамки данной работы воспользуемся /2/, полученные результаты сведены в таблицу 3. Для первых двух случаев контур тока настраивается без учета упругости. При больших значениях коэффициента соотношения масс дополнительное увеличение быстродействия системы может быть получено при снижении быстродействия внутреннего токового контура (пункты 3,4; таблица 3). Значение коэффициента  находится по формуле (31)
находится по формуле (31)
 (31)
(31)
При больших коэффициентах соотношения масс увеличение быстродействия системы по сравнению с
Таблица 3. Настройка П- или ПИ-регуляторов без применения корректирующих устройств.
| Условия реализации настройки | Настройка ПИ-регулятора тока | Настройка П- или ПИ-регулятора скорости |
γ > 3÷3,5
 Выполняются условия пренебрежения влиянием упругости на контур тока
Выполняются условия пренебрежения влиянием упругости на контур тока
| 

| 

|
 Выполняются условия пренебрежения влиянием упругости на контур тока
Выполняются условия пренебрежения влиянием упругости на контур тока
| Та же |   ,
где, ,
где, 
|
| 
| 
|
|
| 
| 
|
соответствующим пункта 2 таблицы 3. может быть получено за счет применения регулятора скорости с передаточной функцией вида
 . (32)
. (32)
За счет этого коэффициент усиления регулятора в области верхних частот снижается, что позволяет повысить βрспо сравнению с пунктом 2 таблицы 3. Величину τр1надо ограничить значением  ,
,  .
.
7. НАСТРОЙКА ДВУХМАССОВОЙ СИСТЕМЫ С КОРРЕКТИРУЮЩИМИ УСТРОЙСТВАМИ
Из изложенного в предыдущем пункте можно сделать вывод, что при коэффициентах соотношения масс, лежащих в пределах γ = 3,5÷10, и незначительных по сравнению с Ту малых постоянных времени может быть получено быстродействие, оцениваемое как предельное. Если же коэффициент соотношения масс близок к единице, то настройкой регуляторов тока и скорости и невозможно добиться плавного и быстрого движении вала. Исходя из сказанного, нужно рассмотреть возможности введения дополнительных корректирующих связей, которые могли бы улучшить динамику системы при значениях коэффициента соотношения масс γ<3,5 и γ>10.
Будем исходить из следующих предпосылок:
– в двухмассовой системе существует практическая возможность введения корректирующих связей по току якоря, скорости двигателя и скорости исполнительного вала. Поскольку жесткие связи по двум первым координатам введены, а возможность введения жесткой связи по скорости исполнительного вала обсуждались выше, будем рассматривать гибкие связи;
– учитывая практические трудности многократного дифференцирования выходных сигналов измерителей тока и скорости, ограничимся рассмотрением сигналов по первым производным, сделав исключение для сигнала по второй производной от скорости исполнительного вала, который с определенным приближением может быть реализован в двухмассовой системе как сигнал по разности скоростей двигателя и исполнительного вала;
– будем считать, что дополнительные обратные связи вводятся на вход регулятора скорости, что позволяет сохранить принцип ограничения тока якоря за счет ограничения выходного напряжения регулятора скорости.
При рассмотрении способов коррекции считается, что обратной связью по ЭДС двигателя можно пренебречь /2/. Рассмотрим случай, когда быстродействие токового контура велико (Wiз(p)≈1) и постоянная времени фильтра тахогенератора мала по сравнению с Ту. Фрагмент СПУ, построенной с учетом этих допущений показана на рисунке 2.6.
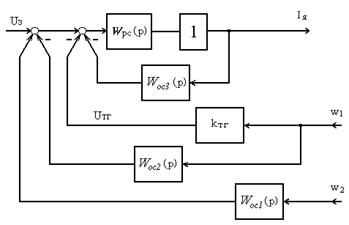
Рисунок 7 – Фрагмент структурной схемы регулирования скорости двигателя при отсутствии малых постоянных времени
Далее рассмотрим некоторые способы коррекции.
Date: 2015-09-05; view: 450; Нарушение авторских прав