Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Уравнения динамики и энергетического баланса при качении тел по наклонным поверхностям
|
|
3.1. Уравнения динамики и расчёты коэффициента сопротивления качению
В данной работе рассматривается качение для плоского типа движения тела. Движение твёрдого тела называется плоским (или плоско – параллельным), если тело, перемещаясь в пространстве, совершает повороты, не имея закреплённых точек, и при этом каждая точка тела движется в одной и той же плоскости, параллельной некоторой неподвижной плоскости.
Плоское движение могут совершать тела разной формы, в данном случае: стальной шар, катящийся по наклонным поверхностям. Исследуемое тело (шар) является однородным, так что центр его масс совпадает с центром симметрии. Следует подчеркнуть, что только при выполнении этого условия траектория центра масс повторяет профиль опорной поверхности, вдоль которой перемещается вместе с катящимся телом ось мгновенного вращения. В классической механике доказано, что в этом случае для теоретических расчётов можно использовать уравнение динамики вращательного движения тела относительно мгновенной оси в виде:
 (6)
(6)
Здесь: e - угловое ускорение;
Jp и Mp – момент инерции и суммарный момент внешних сил относительно мгновенной оси, проходящей через точку касания между телом и опорой поверхностью (обозначается буквой P, см. рис. 2).
| w,e |
| z |
| y |
| x |
| C |
| Ms |
| Vc, ac |
| a |
Для более детальных расчётов уравнение (6) дополняют: условием кинематической связи между ускорением центра масс ас и угловым ускорением тела e; уравнением динамики движения центра масс (II закон динамики Ньютона) и уравнением динамики вращательного движения тела относительно
| G |
| P |
| Fсц |
Рис.2
оси, проходящей через центр масс параллельно мгновенной оси в т. Р.
На рис. 2 изображено однородное тело (шар радиусом r), скатывающееся без скольжения по наклонной поверхности. Направление поворота с угловыми
скоростью w и ускорением e показано изогнутой стрелкой (при этом векторы  и
и  направлены вдоль оси Y). Показаны направления скорости Vc и ускорения ac центра масс тела – т. С. В т. Р – м. ц. с. и здесь приложена сила Fсц. Сила тяжести G всегда приложена в центре масс. Пара сил с моментом сопротивления Ms обозначена здесь изогнутой стрелкой (силы N и GN, образующие эту пару сил, показаны на рис 1б).
направлены вдоль оси Y). Показаны направления скорости Vc и ускорения ac центра масс тела – т. С. В т. Р – м. ц. с. и здесь приложена сила Fсц. Сила тяжести G всегда приложена в центре масс. Пара сил с моментом сопротивления Ms обозначена здесь изогнутой стрелкой (силы N и GN, образующие эту пару сил, показаны на рис 1б).
Принимая, что скатывающееся тело совершает плоское движение, запишем полную систему уравнений динамики в проекциях на оси координат (см. рис. 2):
Система уравнений (7) дана с учётом момента сопротивления Ms, который действует при вычислении моментов сил как относительно т. Р, так и относительно т. С. Соотношение (7 г) – это условие кинематической связи между ac и e, выполняющееся только при качении без скольжения.
Уравнения (7) описывают качение ведомого тела, и сила Fсц направлена противоположно ускорению центра масс ac. Отметим, что с ростом угла наклона a величиной Ms для упрощения некоторых расчётов можно пренебречь, т. к. в (7а) sin a - возрастает, а в (7б), где Fсц и Ms зависят от величины cos a, надо учитывать, что всегда значения коэффициентов d<<m. Это условие было использовано при выводе формулы (2) для предельного значения коэффициента m, обеспечивающего сцепление с ростом угла наклона.
Общий вид решения для ускорения ac, скорости Vc и длины пути l c центра масс тела легко получается из уравнения (7а) при условиях постоянства угла наклона a и момента сопротивления Ms. При этих условиях движение тела является равнопеременным, т. е. качением с постоянными угловым ускорением e и ускорением центра масс a c. Для скатывающегося шара с радиусом r такие решения имеют вид:
 (8а)
(8а)
 (8б)
(8б)
 (8в)
(8в)
Здесь: tk – время скатывания;
l c – длина прямолинейного пути центра масс шара.
Из (8в) получаем следующую формулу для коэффициента сопротивления качению d:
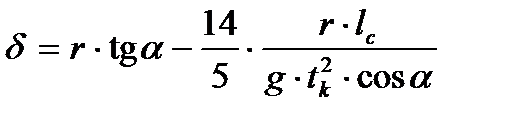 (9)
(9)
Формулу (9) можно, в принципе, использовать для определения величины d, измеряя в эксперименте время скатывания tk на пути lc при заданном угле наклона. Однако, как показывает предварительный анализ, постановка таких измерений нецелесообразна, т. к. требует громоздких устройств и особо точных приборов.
Это объясняется тем, что значения коэффициентов d обычно невелики. Например, при качении стальных шариков по стальным поверхностям значения d лежат в интервале: d = (1 – 5)×10-3 см. Несложный анализ формулы (8в) показывает, что при таких значениях d ожидаемая разница времён скатывания без учёта и с учётом сопротивления качению даже на длине lc» 100 м при углах a» (5 – 10)° лежит в интервале (0,1 – 0,2) сек при времени скатывания tk» (14 – -15) сек.
Такая малая разность времён скатывания "маскируется" погрешностями измерений параметров в формуле (9). Следовательно, результаты измерений коэффициента d на основе решений уравнений динамики (7) не дают достоверных сведений о его величине, если в опытах не используется особо точная (и, соответственно, дорогая) аппаратура.
В следующем разделе 3.2 рассмотрена более простая методика определения коэффициента d, основанная на применении уравнения энергетического баланса.
3.2. Уравнение энергетического баланса и методика определения коэффициента сопротивления качению
Уравнение энергетического баланса – это математическая формулировка общефизического закона сохранения энергии. Для установок, где механическая энергия может – под действием непотенциальных сил – преобразовываться в другие формы энергии, уравнение баланса имеет вид:
 (10)
(10)
Здесь: Е0 – начальная механическая энергия;
E(t) – механическая энергия в момент времени t;
Es – потери механической энергии, обусловленные работой непотенциальных сил.
Уравнение (10) позволяет в ряде случаев выполнять исследования более простыми методами, чем с применением системы уравнений динамики, например, типа (7) для качения тел.
Рассмотрим методику определения коэффициента сопротивления качению d с учётом уравнения (10) на установке "Механический лоток". Принципиальная схема такой установки дана на рис. 3.
| a |
| hi |
| li |
| a |
| hN |
| l0 |
| lN |
| b |
| h0 |
Рис. 3.
Установка состоит из двух наклонных плоскостей с равными углами наклона. Исследуемое тело – шар может перекатываться с одной плоскости на другую по желобу, обеспечивающему плоско – параллельный тип движения при качении.
Поднятое в верхнее положение и покоящееся тело имеет начальную механическую энергию Е0, равную потенциальной энергии П0 = mgh0, где h0 – высота подъёма центра масс, отсчитываемая от нижнего уровня спуска (см.
рис. 3).
Механическая энергия при движении в произвольный момент времени t равна:
 , (11)
, (11)
где П(t) = mgh;  - потенциальная и кинетическая энергии при качении без скольжения.
- потенциальная и кинетическая энергии при качении без скольжения.
Если допустить, что потери механической энергии при качении отсутствуют (Es = 0), тогда тело, перекатываясь с одной плоскости на другую, в моменты остановок (когда ω = 0) поднималось бы на одну и ту же высоту, равную h0. Этот вывод легко проверить теоретически, подставляя формулу (11) в уравнение (10). При условии, что Es = 0 и кинетическая энергия в момент времени tk остановки T(tk) = 0, получим: П0 = П(tk), т.е. высота h в момент остановки тела должна равняться начальной высоте h0.
В опыте, однако, наблюдается уменьшение высоты подъёма тела после каждого очередного перекатывания. На схеме рис.3 показан шар, поднявшийся на высоту hN после числа перекатываний, равного N. Поскольку в моменты остановок кинетическая энергия равна нулю, из (10) и (11) получаем:
 (12)
(12)
Здесь: Es – потери энергии, равные работе момента сопротивления качению As за всё время движения.
Используя формулу (5), получаем:
 (13)
(13)
Здесь: φ – полный угол поворота шара при качении, который определяется простым выражением:
 , (14)
, (14)
где L – длина пути центра масс шара за время катаний с одной плоскости на другую.
Схема, приведённая на рис.3, позволяет найти для расчёта величины L следующую простую формулу:
 (15)
(15)
Из схемы на рис.3 также видно, что высоты h0 и hN можно найти с помощью выражений:
 (16)
(16)
Подставляя (13), (14), (16) в уравнение (12) и учитывая:  , получим выражение для расчёта коэффициента сопротивления качению в следующем виде:
, получим выражение для расчёта коэффициента сопротивления качению в следующем виде:
 , (17)
, (17)
где: ‹ b › = ‹ l0 › - ‹ lN › – разность отсчётов расстояний от нижней точки спуска до центра шара;
‹ L › – вычисляется с помощью формулы (15).
Выражение (17) показывает, что использование закона сохранения энергии (в форме уравнения энергетического баланса) позволяет проводить опыты для определения коэффициента δ без измерения времени движения. Требуются только линейные измерения величин b и L. Экспериментальная установка при этом может иметь небольшие размеры.
Кроме того, значительно повышается достоверность результатов измерения коэффициента δ по сравнению с результатами, получаемыми по формуле (9). Это объясняется тем, что погрешности линейных измерений параметров в формуле (17) обеспечивают для коэффициента δ доверительный интервал, величина которого на два порядка меньше среднего значения δ, получаемого в опыте.
Date: 2015-09-05; view: 895; Нарушение авторских прав