Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Основы кинематики
|
|
Механическое движение. Относительность движения. Система отсчета. Материальная точка. Траектория. Путь и перемещение. Средняя скорость. Мгновенная скорость. Ускорение. Равномерное и равноускоренное прямолинейное движение. Сложение скоростей.
Графики зависимости кинематических величин от времени в равномерном и равноускоренном движении.
Свободное падение тел. Ускорение свободного падения. Движение тела, брошенного горизонтально. Движение тела, брошенного под углом к горизонту.
Движение тела по окружности с постоянной по модулю скоростью. Ускорение при движении тела по окружности с постоянной по модулю скоростью (центростремительное ускорение).
Основные понятия кинематики
Кинематика — раздел механики, изучающий движение тел без учета причин, вызвавших это движение.
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Механическое движение — это изменение положения тел (или частей тела) относительно друг друга в пространстве с течением времени.
Для описания механического движения надо выбрать систему отсчета.
Тело отсчета — тело (или группа тел), принимаемое в данном случае за неподвижное, относительно которого рассматривается движение других тел.
Система отсчета — это система координат, связанная с телом отсчета, и выбранный способ измерения времени (рис. 1.1)
. 
Рисунок 1.1. Система отсчета
Положение тела можно определить с помощью радиус-вектора  или с помощью координат.
или с помощью координат.
Радиус-вектор точки М — направленный отрезок прямой, соединяющий начало отсчета Ос точкой М (рис. 1.2).
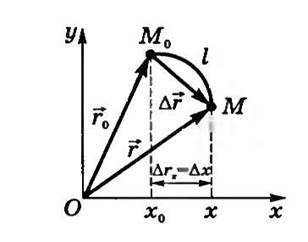
Рисунок 1.2. Радиус-вектор.
Координата х точки М — это проекция конца радиуса-вектора точки М на ось Ох. Обычно пользуются прямоугольной системой координат. В этом случае положение точки М на линии, плоскости и в пространстве определяют соответственно одним (х), двумя (х, у) и тремя (,х, у, z) числами — координатами (рис. 1.3).
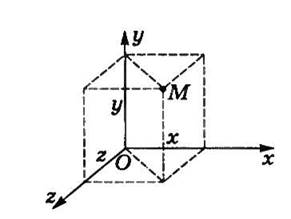
Рисунок 1.3. Координаты точки в прямоугольной системе координат.
В элементарном курсе физики изучают кинематику движения материальной точки.
Материальная точка — тело, размерами которого в данных условиях можно пренебречь.
Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно.
Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
В дальнейшем под словом "тело" будем понимать "материальная точка".
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. На практике форму траектории задают с помощью математических формул (у=f(х) — уравнение траектории) или изображают на рисунке. Вид траектории зависит от выбора системы отсчета. Например, траекторией тела, свободно падающего в вагоне, который движется равномерно и прямолинейно, является прямая вертикальная линия в системе отсчета, связанной с вагоном, и парабола в системе отсчета, связанной с Землей.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Путь s — скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s> 0.
Перемещение  тела за определенный промежуток времени — направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 1.2):
тела за определенный промежуток времени — направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 1.2):
 ,
,
где и  — радиус-векторы тела в эти моменты времени.
— радиус-векторы тела в эти моменты времени.
Проекция перемещения на осьОх:Δrx =Δх = х-х0, где x 0 иx — координаты тела в начальный и конечный моменты времени.
Модуль перемещения не может быть больше пути:
│ │≤s.
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:

Скорость — мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной.
Средняя скорость <  > — векторная физическая величина, численно равная отношению перемещения к промежутку времени, за который оно произошло, и направленная вдоль перемещения (рис. 1.4):
> — векторная физическая величина, численно равная отношению перемещения к промежутку времени, за который оно произошло, и направленная вдоль перемещения (рис. 1.4):
 (1.1)
(1.1)
В СИ единицей скорости является метр в секунду  .
.
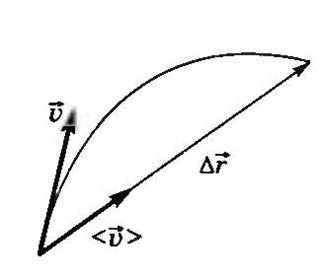
Рисунок 1.4. Направление средней и мгновенной скоростей.
Средняя скорость, найденная по формуле (1.1), характеризует движение только на том участке траектории, для которого она определена. На другом участке траектории она может быть другой.
Иногда пользуются средней скоростью пути:
 —
—
где s – путь, пройденный за промежуток времени Δt. Средняя скорость пути — это скалярная величина.
Мгновенная скорость  тела — скорость тела в данный момент времени (или в данной точке траектории). Она равна пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени
тела — скорость тела в данный момент времени (или в данной точке траектории). Она равна пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени
 .
.
Здесь  — производная от радиус-вектора по времени.
— производная от радиус-вектора по времени.
В проекции на ось Ох:
Мгновенная скорость тела направлена по касательной к траектории в каждой ее точке в сторону движения (см. рис. 1.4).
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени.
Среднее ускорение — физическая величина, численно равная отношению изменения скорости ко времени, за которое оно произошло:
Вектор  направлен параллельно вектору изменения скорости
направлен параллельно вектору изменения скорости  (
( )в сторону вогнутости траектории (рис. 1.5).
)в сторону вогнутости траектории (рис. 1.5).
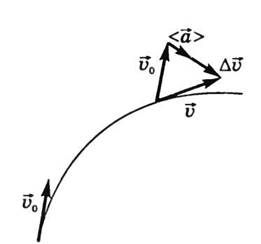
Рисунок 1.5. Среднее ускорение.
Мгновенное ускорение:
В СИ единицей ускорения является метр на секунду в квадрате  .
.
В общем случае мгновенное ускорение направлено под углом к скорости. Зная траекторию, можно определить направление скорости, но не ускорения. Направление ускорения определяется направлением равнодействующей сил, действующих на тело.
При прямолинейном движении с возрастающей по модулю скоростью(рис. 1.6,а) векторы  и
и  сонаправлены (
сонаправлены ( ) и проекция ускорения на направление движения положительна.
) и проекция ускорения на направление движения положительна.
При прямолинейном движении с убывающей по модулю скоростью(рис. 1.6, б) направления векторов и противоположны ( ) и проекция ускорения на направление движения отрицательна.
) и проекция ускорения на направление движения отрицательна.

Рисунок 1.6. а) ускоренное движение, б) замедленное движение
Вектор при криволинейном движении можно разложить на две составляющие, направленные вдоль скорости  и перпендикулярно скорости
и перпендикулярно скорости  (рис. 1.7), — тангенциальное ускорение, характеризующее быстроту изменения модуля скорости при криволинейном движении, — нормальное ускорение, характеризующее быстроту изменения направления вектора скорости при криволинейном движении.
(рис. 1.7), — тангенциальное ускорение, характеризующее быстроту изменения модуля скорости при криволинейном движении, — нормальное ускорение, характеризующее быстроту изменения направления вектора скорости при криволинейном движении.
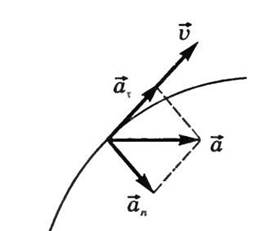
Рисунок 1.7. Разложение мгновенного ускорения на составляющие.
Модуль ускорения
 .
.
2. Относительность движения. Сложение скоростей
Как отмечалось выше, для описания движения тела необходимо выбрать тело отсчета и связать с ним систему координат. В качестве тела отсчета может выступать любое тело.
В разных системах отсчета будут различны вид траектории, значения скорости, перемещения и других величин. В этом и заключается относительность движения.
Пример. Человек идет по палубе парохода со скоростью  относительно парохода. Пароход движется поступательно со скоростью
относительно парохода. Пароход движется поступательно со скоростью  относительно берега. Найдем скорость человека относительно берега.
относительно берега. Найдем скорость человека относительно берега.
Свяжем неподвижную систему отсчета (хОу) с Землей, а подвижную (х'О'у') — с пароходом.
Из рисунка 2.1 видно, что перемещение
 (2.1)
(2.1)
где  — перемещение человека относительно парохода,
— перемещение человека относительно парохода,  — перемещение парохода относительно берега, — перемещение человека относительно берега.
— перемещение парохода относительно берега, — перемещение человека относительно берега.
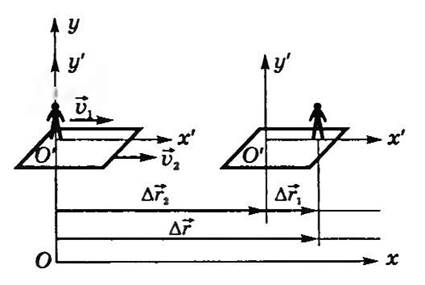
Рисунок 2.1. Перемещение человека относительно парохода(х'О'у') и относительно берега (хОу)
Таким образом, если тело одновременно участвует в нескольких движениях, то результирующее перемещение точки равно векторной сумме перемещений, совершаемых ею в каждом из движений. В этом состоит установленный экспериментально принцип независимости движений.
Разделив уравнение (2.1) на промежуток времени, за который произошли перемещения человека и парохода, получим закон сложения скоростей:

Скорость  тела относительно неподвижной системы отсчета равна геометрической сумме скорости
тела относительно неподвижной системы отсчета равна геометрической сумме скорости  тела относительно подвижной системы отсчета и скорости
тела относительно подвижной системы отсчета и скорости  самой подвижной системы отсчета относительно неподвижной.
самой подвижной системы отсчета относительно неподвижной.
Закон сложения скоростей справедлив и для неравномерного движения, только в этом случае  — мгновенные скорости.
— мгновенные скорости.
Этот закон был установлен Г. Галилеем. Он справедлив только для движений со скоростями, намного меньшими скорости света с = 3•108 . Такие скорости в физике называют нерелятивистскими.
3. Равномерное прямолинейное движение
Равномерное прямолинейное движение — это движение, при котором тело за любые равные промежутки времени совершает равные перемещения, т. е. это движение с постоянной по модулю и направлению скоростью:
 — уравнение скорости,
— уравнение скорости,
 — уравнение ускорения.
— уравнение ускорения.
Пусть в момент времени t0= 0 координата тела х0, в моментt — х (рис. 3.1).

Рисунок 3.1. Перемещение тела при равномерном прямолинейном движении.
|
Δх = х - х0.
Следовательно, проекция скорости тела
 ,
,
следовательно,
x = x0+vxt — кинематическое уравнение равномерного движения (уравнение зависимости координаты от времени).
Проекция перемещения
Δrx=х-х0 =>
Δrx= vxt — уравнение перемещения.
При равномерном прямолинейном движении направление скорости не изменяется, поэтому путь
 .
.
Следовательно,
 — уравнениепути.
— уравнениепути.
Зависимость кинематических величин от времени можно изобразить графически.
|

Рисунок 3.2. Схематическое изображение трех тел, движущихся вдоль оси х.
Тела 1, 2 движутся в положительномнаправлении оси Ох, причем  ; тело 3 движется в направлении, противоположном оси Ох; их начальные координаты соответственно
; тело 3 движется в направлении, противоположном оси Ох; их начальные координаты соответственно  ,
,  .
.
Графики скорости представлены на рисунке 3.3.

Рисунок 3.3. График зависимости проекции скорости от времени
Площадь заштрихованного прямоугольника численно равна пути s (модулю перемещения), пройденному телом 1 за время t1.
На рисунке 3.4 даны графики перемещения  .
.
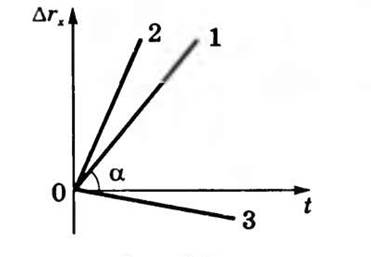
Рисунок 3.4. График зависимости проекции перемещения от времени.
На рисунке 3.5 — графики пути s=f(t)
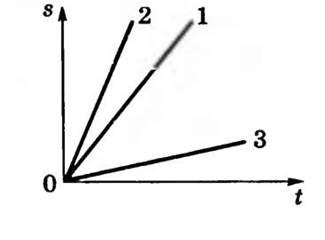
Рисунок 3.5. График зависимости пути от времени.
Наклон графика ,к оси времени зависит от модуля скорости:
 .
.
Графики движения (зависимости координаты от времени) изображены на рисунке 3.6.
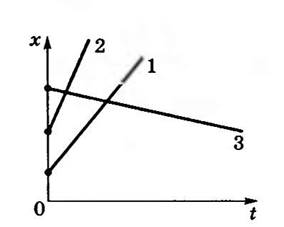
Рисунок 3.6. График зависимости координаты от времени.
С помощью графика движения можно определить:
1) координаты тела в любой момент времени;
2) путь, пройденный телом за некоторый промежуток времени;
3) время, за которое пройден какой-то путь;
4) кратчайшее расстояние между телами в любой момент времени;
5) момент и место встречи тел и др.
Date: 2015-09-03; view: 789; Нарушение авторских прав