Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Кинематика вращательного движения: угловая скорость и угловое ускорение, их связь с линейной скоростью и ускорением
|
|
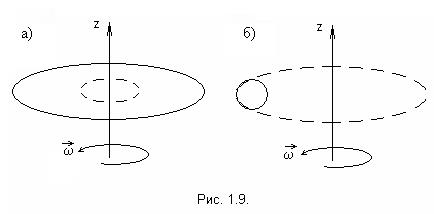 Вращательным называют такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной кривой, называемой осью вращения (рис.1.9).Ось вращения может находиться как внутри (рис.1.9.а), так и вне тела (рис.1.9.б).
Вращательным называют такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной кривой, называемой осью вращения (рис.1.9).Ось вращения может находиться как внутри (рис.1.9.а), так и вне тела (рис.1.9.б).
Поворот тела на некоторый угол  можно задать в виде отрезка, длина которого , а направление совпадает с осью вращения. Для того, чтобы указать, в какую сторону совершается поворот вокруг данной оси, связывают направление поворота и изображающего его отрезка правилом правого винта: направление отрезка должно быть таким, чтобы, глядя вдоль него, мы видели поворот совершающимся по часовой стрелке (рис.1.10). Вектор поворота является не истинным вектором, а псевдовектором.
можно задать в виде отрезка, длина которого , а направление совпадает с осью вращения. Для того, чтобы указать, в какую сторону совершается поворот вокруг данной оси, связывают направление поворота и изображающего его отрезка правилом правого винта: направление отрезка должно быть таким, чтобы, глядя вдоль него, мы видели поворот совершающимся по часовой стрелке (рис.1.10). Вектор поворота является не истинным вектором, а псевдовектором.

 Векторная величина
Векторная величина  ,
,
где  –время, за которое совершается поворот , называется угловой скоростью тела. Она направлена по оси вращения в сторону, определяемую правилом правого винта, и представляет собой псевдовектор. Модуль угловой скорости равен
–время, за которое совершается поворот , называется угловой скоростью тела. Она направлена по оси вращения в сторону, определяемую правилом правого винта, и представляет собой псевдовектор. Модуль угловой скорости равен  .
.
Вращение с постоянной угловой скоростью называют равномерным. Такое движение характеризуют периодом  , под которым понимают время полного оборота. При этом
, под которым понимают время полного оборота. При этом  , тогда
, тогда  , и
, и  . Число оборотов в единицу времени (частота обращения) равно
. Число оборотов в единицу времени (частота обращения) равно  .
.
 Подставив , получаем:
Подставив , получаем:  .
.
Вектор  может изменяться как при изменении скорости вращения тела вокруг оси (по величине), так и при повороте оси вращения в пространстве (в этом случае меняется по направлению). Изменение вектора угловой скорости со временем характеризуется угловым ускорением
может изменяться как при изменении скорости вращения тела вокруг оси (по величине), так и при повороте оси вращения в пространстве (в этом случае меняется по направлению). Изменение вектора угловой скорости со временем характеризуется угловым ускорением  . Угловое ускорение, также как и угловая скорость, является псевдовектором.
. Угловое ускорение, также как и угловая скорость, является псевдовектором.
Отдельные точки вращающегося тела имеют различные линейные скорости  . Скорость каждой из точек непрерывно изменяет свое направление. Величина скорости определяется угловой скоростью вращения тела
. Скорость каждой из точек непрерывно изменяет свое направление. Величина скорости определяется угловой скоростью вращения тела  и расстоянием
и расстоянием  рассматриваемой точки от оси вращения. Пусть за малый промежуток времени тело повернулось на угол (рис.1.11). Точка, находящаяся на расстоянии от оси, проходит при этом путь
рассматриваемой точки от оси вращения. Пусть за малый промежуток времени тело повернулось на угол (рис.1.11). Точка, находящаяся на расстоянии от оси, проходит при этом путь  . Линейная скорость точки равна
. Линейная скорость точки равна  . (1.9)
. (1.9)
Эта формула связывает модули линейной и угловой скоростей. Найдем выражение, связывающее векторы и . Положение рассматриваемой точки тела будем определять радиус-вектором  , проведенным из лежащего на оси вращения начала координат О (рис.1.12). Из рисунка видно, что векторное произведение
, проведенным из лежащего на оси вращения начала координат О (рис.1.12). Из рисунка видно, что векторное произведение  совпадает по направлению с вектором и имеет модуль, равный
совпадает по направлению с вектором и имеет модуль, равный  . Следовательно,
. Следовательно,  .
.
Нормальное ускорение точек вращающегося тела равно  .
.
Если ввести перпендикулярный к оси вращения вектор  , проведенный в данную точку тела (рис.1.12), это выражение можно записать в векторной форме
, проведенный в данную точку тела (рис.1.12), это выражение можно записать в векторной форме  . Знак минус поставлен, так как векторы
. Знак минус поставлен, так как векторы  и направлены противоположно.
и направлены противоположно.
Будем считать, что ось вращения не поворачивается в пространстве. В этом случае расстояние рассматриваемой точки до оси вращения не меняется,  , и, взяв производную от выражения (1.9), получаем
, и, взяв производную от выражения (1.9), получаем
 |
Таким образом, нормальное и тангенциальное ускорения растут линейно с увеличением расстояния точки от оси вращения.
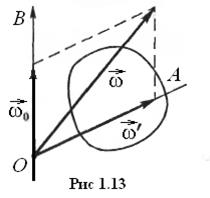 В случае сложного вращения, когда тело движется одновременно относительно нескольких осей, необходимо производить сложения угловых скоростей. Рассмотрим движение твердого тела, вращающегося одновременно вокруг двух пересекающихся осей. Сообщим некоторому телу вращение с угловой скоростью
В случае сложного вращения, когда тело движется одновременно относительно нескольких осей, необходимо производить сложения угловых скоростей. Рассмотрим движение твердого тела, вращающегося одновременно вокруг двух пересекающихся осей. Сообщим некоторому телу вращение с угловой скоростью  вокруг оси ОА (рис. 1.13) и затем эту ось приведем во вращение с угловой скоростью
вокруг оси ОА (рис. 1.13) и затем эту ось приведем во вращение с угловой скоростью  вокруг оси OB, неподвижной в К -системе отсчета. Найдем результирующее движение тела в К -системе.
вокруг оси OB, неподвижной в К -системе отсчета. Найдем результирующее движение тела в К -системе.
Введем вспомогательную K '-систему отсчета, жестко связанную с осями ОА и ОВ. Ясно, что эта система вращается с угловой скоростью , и тело вращается относительно нее с угловой скоростью .
За промежуток времени  тело совершит поворот
тело совершит поворот  вокруг оси АО в K' - системе и одновременно поворот
вокруг оси АО в K' - системе и одновременно поворот  вокруг оси ОВ вместе с K '- системой. Суммарный поворот есть
вокруг оси ОВ вместе с K '- системой. Суммарный поворот есть  = + . Разделив обе части этого равенства на получим
= + . Разделив обе части этого равенства на получим
.
Таким образом, результирующее движение твердого тела в K - системе представляет собой чистое вращение с угловой скоростью  вокруг оси, совпадающей в каждый момент с вектором и проходящей через точку O (рис. 1.13). Эта ось перемещается относительно K - системы — она поворачивается с угловой скоростью вместе с осью ОА вокруг оси ОВ.
вокруг оси, совпадающей в каждый момент с вектором и проходящей через точку O (рис. 1.13). Эта ось перемещается относительно K - системы — она поворачивается с угловой скоростью вместе с осью ОА вокруг оси ОВ.
Нетрудно сообразить, что даже в том случае, когда угловые скорости и не меняются по модулю, тело будет обладать в K - системе угловым ускорением 
 , направленным, согласно
, направленным, согласно  , за плоскость (рис. 1.13).
, за плоскость (рис. 1.13).
И последнее замечание. Поскольку вектор угловой скорости удовлетворяет основному свойству векторов — векторному сложению, можно представить как векторную сумму составляющих на определенные направления, т. е. =  +
+  +..., где все векторы относятся к одной и той же системе отсчета. Этим удобным и полезным приемом часто пользуются при анализе сложного движения твердого тела.
+..., где все векторы относятся к одной и той же системе отсчета. Этим удобным и полезным приемом часто пользуются при анализе сложного движения твердого тела.
Date: 2015-09-03; view: 744; Нарушение авторских прав