Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Проверка качества зацепления по геометрическим показателям
|
|
22. Коэффициент наименьшего смещения (проверка отсутствия подрезания зуба) шестерни и колеса
xmin1=hl* - ha* - (z1sin2a)/2
xmin2=hl* - ha* - (z2sin2a)/2
Сделать заключение о работоспособности передачи, сравнив коэффициент наименьшего смещения с заданным. При x1> xmin1 подрезание зуба шестерни исходной производящей рейкой отсутствует. При x2> xmin2 отсутствует подрезание зуба колеса. При сравнении, в пояснительной записке подставить цифровые значения коэффициентов смещения для колеса и шестерни
23. Радиус кривизны в граничной точке профиля зуба (проварка отсутствия интерференции зубьев) шестерни и колеса
rе1=(d1sina)/2 – (hl* - ha*-x1)m/sina
rе2=(d2sina)/2 – (hl* - ha*-x2)m/sina
Дать заключение о наличии или отсутствии интерференции зубьев. При rе1 < rp1 и rе2 < rp2 интерференция зубьев отсутствует. При rе<0 происходит подрезание зуба. В пояснительной записке обосновать заключение,подставив цифровые значения в неравенство.
24. Коэффициент торцового перекрытия
ea=[z1tgaa1 + z2tgaa2 – (z1+z2)tgaw]/2p
ГОСТ 16532-70 рекомендует для прямозубых передач иметь ea>1,2
25. Нормальная толщина зуба на окружности вершин
Sa1=[p/2+2x1tga+z1(inva-invaa1)]mcosa/cosaa1
Sa2=[p/2+2x2tga+z2(inva-invaa2)]mcosa/cosaa2
Дать заключение о работоспособности зубчатых колес. Гост 16532-70 рекомендует иметь Sa > 0,3m при однородной структуре материала зубьев и Sa > 0,4m при поверхностном упрочнении зубьев. Заключение обосновать,подставив цифровые значения в неравенство в пояснительной записке.
2.4. Проверка качества зацепления по удельному скольжению в контактной точке профиля зуба при движении общей точки по всей длине активной линии зацепления.
26. Скорости общей точки К по эвольвентному профилю в направлении скольжения для шестерни и колеса пропорциональны расстояниям точки контакта К от точек N1 и N2.Эта скорость равна тангенциальной составляющей точки контакта.
Vtky1=w1lN1Х=w1ry1
Vtky2=w2lN2Х=w2ry2
При построении графиков зависимостей Vtky1 и Vtky2 воспользуемся равенством этих скоростей в полюсе Р. Эту скорость следует изобразить любым отрезком PВ, проведенным из полюса Р.
Прямые, исходящие из точек N1 и N2 и проходящие через В дают зависимости Vtky1 и Vtky2.
Графики этих зависимостей (в масштабах для скоростей) для всей длины линии зацепления N1N2 необходимо построить на листе чертежа зубчатой передачи.
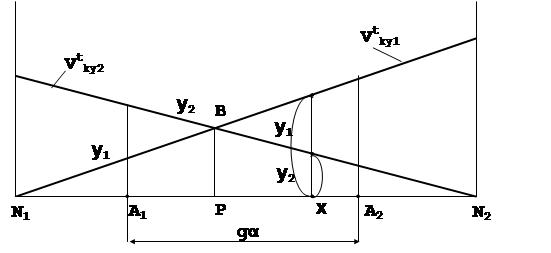 |
Рис. I. Диаграммы тангенциальных составляющих скоростей точек контакта Vtкy1 и Vtкy2 вдоль теоретической линии зацепления.
27. Удельное скольжение контактной точки эвольвентного профиля шестерни и колеса помещаем в таблицу
q12= (Vtky1- Vtкy2)/ Vtky1 = (у1-у2)/у1;
q21= (Vtкy2 - Vtky1)/ Vtкy2 = (у2-у1)/у2;
Для вычисления удельного скольжения рекомендуется исходные данные и результаты записать в таблицу.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| y1 мм | ||||||||||||
| y2 мм | ||||||||||||
| y1-y2 мм | ||||||||||||
| Θ12 | ||||||||||||
| y2-y1 мм | ||||||||||||
| Θ21 |
В число расчетных положений необходимо включить начальную контактную точку профилей зубьев А и конечную контактную точку профилей зубьев В, полученные от пересечения окружностей вершин обоих колес с линией зацепления N1N2.
2.6 Чертеж зубчатой передачи.
В соответствии с заданием вычертить внешнее зацепление и показать не менее трех зубьев на каждом колесе. Масштаб чертежа выбрать таким, чтобы полная высота зуба на чертеже была около 60 мм. Исходя из этих условий задаемся масштабом М
Зацепление колес вычертить с обозначением всех элементов и размеров зацепления. Провести линию центров, пометить на ней центры О1, О2 обоих колес, отметить положение полюса Р на линии центров в точке соприкосновения начальных диаметров шестерни и колеса. Чертим дуги соответствующих начальных окружностей. Далее начертить делительные, основные окружности а также окружности вершин и впадин. Через полюс зацепления Р провести касательную tt к начальным окружностям и линию зацепления N1N2. Она касается обеих основных окружностей в точках N1 и N2 соответственно и образует угол зацепления αw с линией tt.
Вычертить эвольвентные профили зубьев. Для этого делим линию зацепления на отрезки и откладываем на основной окружности дуги, равные этим отрезкам. Качением образующей прямой N1N2 по основным окружностям первого и второго колес строим эвольвенты проходящие через полюс Р.
Для построения трех зубьев на каждом колесе воспользуемся правилами симметричного отображения, величинами угловых шагов зацепления t1 и t2, шагом зацепления рa и шагом на делительной окружности р, а также окружными толщинами зуба на делительной окружности s1 и s2 и нормальными толщинами на окружности вершин sа1 и sа2. На чертеже отметить угол зацепления αw, теоретическую N1N2 и практическую АВ линии зацепления. В точках А и В пунктирной линией построить эвольвентные профили соответствующие моменту входа и выхода зубьев из зацепления. Показать также на действительной линии зацепления пунктирной линией по два эвольвентных профиля, отстоящие от А и В на шаг, тем самым показав зоны однопарного и двупарного зацепления. На чертеже показать дуги перекрытия а1в1 и а2в2 и соответствующие им углы перекрытия φγ1 и φγ2. Для точек А и В показать профильные углы при вершине зубьев шестерни и колеса. Показать шаги по начальной и основной окружности
На листе чертежа поместить три таблицы.
Таблица исходных данных
| Z1 | Z2 | m | α | hе* | ha* | c* | x1 | x2 |
| мм | град | |||||||
Таблица величин, характеризующих шестерню и колесо
| da1 | da2 | d1 | d2 | db1 | db2 | df1 | df2 | h | s1 | s2 | sa1 | sa2 |
| миллиметры | ||||||||||||
Таблица величин, характеризующих зацепление
| aw | αw | y | Δy | xmin1 | xmin2 | dw1 | dw2 | gα | εα | θ12 | θ21 |
| мм | град | мм | мм | мм | |||||||
| От… до | От… до |
ЛИСТ 3 Определение момента инерции маховика и нахождение закона движения для звена приведения внутри цикла установившегося движения.
Цель листа: определить методом Виттенбауэра момент инерции маховика для рычажно – шарнирного механизма движущегося с заданной степенью неравномерности хода d при установившемся режиме работы. Подсчитать мощность машины и найти закон движения для звена приведения внутри цикла установившегося неравновесного движения.
Исходные данные : ( на примере механизма шарнирного четырехзвенника ):
Дана схема механизма, диаграмма нагрузки на коромысло от рабочего органа. Заданы размеры звеньев: l0, l1, l2, l3 и др.
Заданы также:
n об/мин - частота вращения кривошипа,
d - коэффициент неравномерности хода.
3.1 Определение параметров эквивалентной динамической модели.
1. Выбрать масштаб кинематической схемы М таким образом, чтобы план механизма располагался слева вверху на 1\6 листа А1.
1. Вычертить положения механизма, соответствующие обеим крайним мертвым положениям.За нулевое положение принять начало рабочего хода.
3. Изобразить механизм в 12-ти положениях, соответствующих последовательным поворотам начального звена на угол j=p/6 в направлении вращения. Перенумеровать все положения механизма, начиная с нулевого
4. Выделить любое из положений механизма, за исключением мертвых, контурной линией. Это положение будет изображать план механизма.
5. Построить планы скоростей механизма в 12-ти положениях из одного центра, полюса p. Принимаем pb =60…90 мм, чтобы все планы расположились на 1/6 листа.
6. Подсчитать приведенный момент инерции Jпр механизма из условия равенства кинетических энергий звена приведения (кривошипа) и всего механизма. Величина приведенного момента инерции Jпр для любого из вычерченных положений может быть определена по формуле
Jпр=å [milAB2(Vsi / Vb)2 + JsilAB2(wi / Vb)2 ]
i
7. Определить массы и моменты инерции звеньев механизма по эмпирическим формулам.
Массы mi (кг) звеньев считаем пропорциональными их длинам li. (м).
mi=(10….20) li;
массу ползуна, движущегося в неподвижных направляющих, принимать в 8…10 раз больше массы ведущего кривошипа;
массой ползуна, движущейся вдоль подвижной направляющей, пренебречь.
Центр масс кривошипа, шатуна или коромысла располагать на середине длины каждого звена, если это положение не задано.
Моменты инерции Jsi (кгм2) звеньев относительно оси, проходящей через центр масс и перпендикулярной к плоскости движения определяем по эмпирической формуле
Jsi= (0,1……0,125) li2 mi
На основе общего уравнения для Jпр необходимо вывести формулу приведенного момента инерции для своего механизма (в нашем примере для механизма шарнирного четырехзвенника) заменив отношения скоростей соответствующими отрезками плана скоростей.
Jпр=Js1+lAS12m1+JS2(lAB/lBC)2(bc/pb)2+lAB2m2(ps2/pb)2+
+JS3(lAB/lCD)2(pc/pb)2+lAB2m3(ps3/pb)2
Подсчет по этой формуле величин приведенного момента инерции проведем в табличном виде. Для этого составим таблицу в которую будем вносить различные компоненты (слагаемые и сомножители) величины приведенного момента инерции механизма в зависимости от положения начального звена для всех вычерченных положений механизма. В нее внесем все исходные данные, каждое слагаемое и результаты расчета. Отрезки pb, pc и другие из планов скоростей замеряем и вносим в таблицу 3.1.
Таблица 3.1
| Положения механизма | ||||||||
| …… | ||||||||
| JS1+lAS12m1 | кгм2 | постоянная величина | ||||||
| JS2(lAB: lBC)2 | кгм2 | постоянная величина | ||||||
| bc | мм | |||||||
| pb | мм | |||||||
| bc:pb | ||||||||
| JS2(lAB : lBC)2 (bc:pb)2 | кгм2 | |||||||
| lAB2m2 | кгм2 | постоянная величина | ||||||
| ps2 | мм | |||||||
| ps2:pb | ||||||||
| lAB2 m2(ps2:pb)2 | кгм2 | |||||||
| JS3(lAB : lDC)2 | кгм2 | постоянная величина | ||||||
| pc | мм | |||||||
| pc:pb | ||||||||
| JS3(lAB : lDC)2(pc:pb)2 | кгм2 | |||||||
| lAB2m3 | кгм2 | постоянная величина | ||||||
| ps3 | мм | |||||||
| ps3:pb | ||||||||
| lAB2m3(ps3:pb)2 | кгм2 | |||||||
| Jпр | кгм2 |
8. На листе построить график Jпр(j) для полного оборота начального звена, сохраняя нумерацию положений механизма. Масштабный коэффициент по оси j (угол поворота начального звена)
mj=2p/ = радиан/мм
Определить масштабный коэффициент по оси приведенного момента инерции Jпр
mJ= кгм2/мм
9. Построить диаграмму заданной внешней нагрузки, т.е. в нашем примере это момента сопротивления на третье звено.
Mmax=lDCPmax= 1/5Mmax=
На диаграмме отмечаем положения выходного ведомого звена механизма и в каждом положении находим величину момента.
10. Подсчитать приведенный момент Мпр сс сил сопротивления из основания, что для данного мгновенного положения механизма мощность приводимой заданной внешней нагрузки равна мощности приведенного момента сил.
Приведенный момент внешего активного момента M3 определятся по формуле
Mпр=M3ω3/ω1.
При приведении внешней активной силы P3имеем
Mпр=lABP3V3/VB.
При этом необходимо учитывать, что если внешние момент или сила в данный момент будут движущими, то приведенный момент будет положительным. Если приводимые силовые факторы будут силами сопротивления, то приведенный момент сопротивления будет отрицательным. Рекомендуется расчет провести в табличной форме и в таблице для приведенного момента сил Mпр необходимо привести все величины и результаты для всех расчетных положений.
Например, приведенный момент сил Mпр сс для кривошипно-коромыслового механизма вычисляется по формуле
Mпр сс=М3w3/w1=M3(lAB/lCD)(VCD/Vb)= M3(lAB/lCD)(pc/pb)
Полученные данные при расчете занести в таблицу 3.2
Таблица 3.2
| Положения механизма | ||||||||
| ……. | ||||||||
| M3 | Нм | |||||||
| lAB: lСD | постоянная величина | |||||||
| pb | мм | |||||||
| pc | мм | |||||||
| Mпр сс | Нм |
10. Построить график Мпр(j) для полного цикла работы механизма. Дать нумерацию положений механизма. Подсчитать масштабы коэффициенты по координатным осям j и Мпр
mj= рад/мм
mМпр= Нм/мм
11. Методом графического интегрирования графика Мпр. построить график работ приведенного момента сил для всего цикла установившегося движения. Полюсное расстояние принимаем Нм=
Подсчитаем масштаб mА
mА= Нм mMпрmj= Дж/мм
12. Принять, что неизвестный момент сил Мн, действующий на начальное звено механизма, постоянен при установившемся неравновесном движении. Если заданная внешняя нагрузка является движущей, то неизвестный момент Мн будет моментом сопротивления. Если же заданная внешняя нагрузка представляет силу или момент сопротивления, то неизвестный момент Мн будет являться движущим. В нашем случае Мн- движущий момент. При допущении что Мн= const., работа неизвестного момента будет прямо пропорциональна углу поворота начального звена А=Мнj, а так как за цикл установившегося неравновесного движения разность работы приводимой нагрузки и и работа неизвестного момента равна нулю, то можно соединить прямой линией начало и конец графика Ан(j). Эту прямую отобразим относительно оси абсцисс. Это будет график работы неизвестного момента сил внутри цикла работы..
13.Методом графического дифференцирования зависимости Ан(j) найти величину неизвестного момента сил Мн
Мн=
14.Воспользоваться графиками Адв с и Асс с и построить в новых координатных осях график избыточной работы Аизб=Адв-Асс за весь цикл установившегося неравновесного движения механизма.
mАизб= Дж/мм
15.Потроить диаграмму Виттенбауэра в совмещенных координатах, то есть график зависимости избыточной работы от приведенного момента инерции механизма Аизб=Аизб(Jпр) Для этого необходимо снести соответствующие точки с графиков Аизб и Jпр, сохраняя масштабы mАи mJ.
Date: 2015-09-02; view: 796; Нарушение авторских прав