Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Определение скоростей и ускорений точки D
|
|
Скорость есть первая производная от каждого уравнения системы, определяющей положение точки D в пространстве в произвольный момент времени



Общая скорость точки D определяется из уравнения

Ускорение есть вторая производная от каждого уравнения системы, определяющей положение точки D в пространстве в произвольный момент времени

Общее ускорение точки D определяется из уравнения:

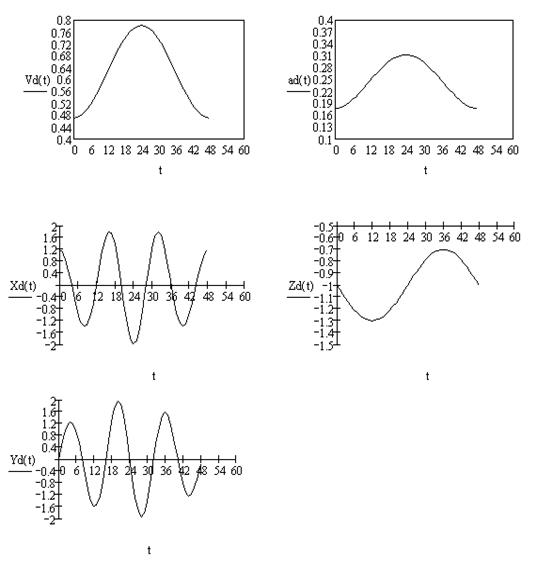
8. Расчёт и построение зависимостей перемещений, скорости, ускорения точки D от времени для одного цикла
Расчёт и построение зависимостей перемещений, скорости и ускорения точки D в зависимости от времени осуществляется в MathCAD, при этом используются уравнения, описанные в пункте 8 РГР.

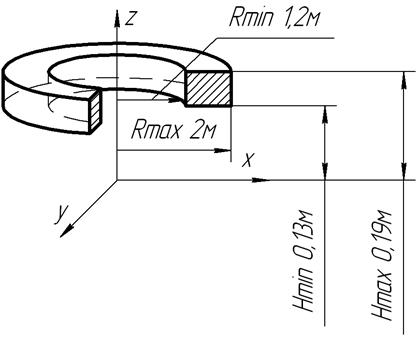
9. Определение и построение зоны обслуживания
φ1min=0 φ1max=18,72
S2min=0,6 S2max=1,4
S1min=0 S1max=0,6
Rmin=S2min+L2 Rmin=1,2
Rmax= S2max+L2 Rmax=2
Hmin=L1+S1min Hmin=1,3
Hmax=L1+S1max Hmax=1,9
Выводы
Данный манипулятор предназначен для промышленного производства и имеет 3 кинематические пары и не является сложным как в эксплуатации, так и в изготовлении. Оборудование вокруг такого манипулятора должно располагаться с требуемой ориентацией.
Незамкнутая кинематическая цепь манипулятора позволяет схвату занимать различные положения в некотором объеме.
Исходя из максимальной скорости перемещения центра схвата, его можно отнести к высокоскоростным манипуляторам.
Область движения схвата по вертикали составляет 0,6м, а по горизонтали 0,8м и что является приемлемым для промышленного производства.
Список используемых источников
1. Подураев. Ю. В. Мехатроника: основы, методы, применение: Учеб. пособие- М.: Машиностроение., 2006.- 256 с.
2. Механика промышленных роботов: Учеб. Пособие для вузов: В 3 кн. Под ред. К. В. Фролова, Е. И. Воробьева. Кн.2: расчет и проектирование механизмов Е. И. Воробьев, О. Д. Егоров, С. А. Попов. – М: Высш. шк., 1988.-367 с.:
3. Дунаев П. Ф., Леликов О. П. Конструирование узлов и деталей машин: Учеб. пособие для машиностроит. Спец. Вузов.-4-е изд., перераб. и доп.- М.: Высш шк., 1985.-416 с.
Размещено на Allbest.ru
Date: 2015-08-24; view: 405; Нарушение авторских прав