Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
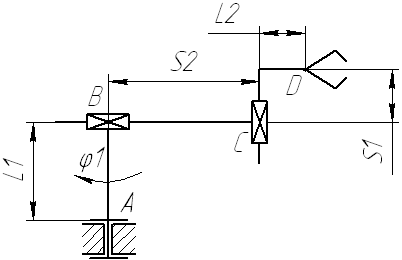
Структурная схема механизма робота-манипулятора в пространстве
|
|
Исходные данные на выполнение практической работы
Схема №__Приклад
Вариант №__Приклад
L1 = 1,3 м
L2 = 0,6 м
S1 = 0,3 – 0,3 sin ((π/24)t) м
S2 = 1 – 0,4cos ((π/24)t) м
φ1 = (π/8)t = 0,39t рад
Введение
Промышленный робот – автоматическая машина состоящая из манипулятора и устройства программного управления его движением, предназначенное для замены человека при выполнении основных и вспомогательных операций в производственных процессах.
Манипулятор – совокупность пространственного рычажного механизма и системы приводов, осуществляет под управлением программного автоматического устройства или человеко-оператора манипуляции которого аналогичны действиям руки человека.
Назначение и область применения:
Промышленный робот(ПР) предназначен для замены человека в процессе промышленного производства. При этом решается важная социальная задача – освобождение человека от работ связанных с опасностями для здоровья или с тяжелым физическим трудом, а также от простых монотонных операций, натребует высокой квалификации.
Гибкие автоматизированные производства созданные на базе ПР позволяют решать задачи автоматизации на предприятиях с широкой номенклатурой продукции при мелкосерийном и штучном производстве.
Манипулятор ПР по своему функциональному назначению должен обеспечивать движение выходного звена, закрепленного в нем объекта, манипулирования в пространстве, по заданной траектории и с заданной ориентацией.
Структурная схема механизма робота-манипулятора в пространстве
Изображение механизма робота-манипулятора в пространстве строится под углом Ф=10º

Date: 2015-08-24; view: 990; Нарушение авторских прав