Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Структурный анализ механизма робота-манипулятора
|
|

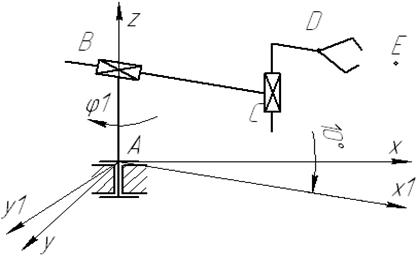
В этой системе звено 1 может вращаться относительно звена 0 – относительное угловое перемещение Ф. Звено 2 перемещается в горизонтальной плоскости относительно звена 1 – относительное линейное перемещение S21 Звено 3 перемещается по вертикали относительно звена 2 – относительное линейное перемещение S32.
Определение степени подвижности механизма робота-манипулятора
Характеристика кинематических пар:
А01 – вращательное, одноподвижное, 5 класса
В12 – поступательное, одноподвижное, 5 класса
С23 – поступательное, одноподвижное, 5 класса
Количество степеней свободы механизма определяется по формуле:
W = 6n – 5p5 [1.1 стр. 55]
W = 6*3 – 5*3 = 3
4. Определение манёвренности механизма робота-манипулятора
Маневренность манипулятора определяется как число степеней свободы механизма при неподвижном, фиксированном положении схвата.
Для данного механизма манёвренность m = 0, поскольку к заданной точке рабочего объёма Е, в заданном направлении СЕ, схват может подойти только при одном единственном положении звеньев 1, 2
Date: 2015-08-24; view: 803; Нарушение авторских прав