Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Определение различных конфигураций манипулятора
|
|
Для манипуляторов типа Пума и других манипуляторов с вращательными сочленениями возможны различные типы конфигурации, которые определяются по аналогии с геометрией руки человека. Типы конфигурации манипулятора устанавливаются следующим образом (рис. 4.2):
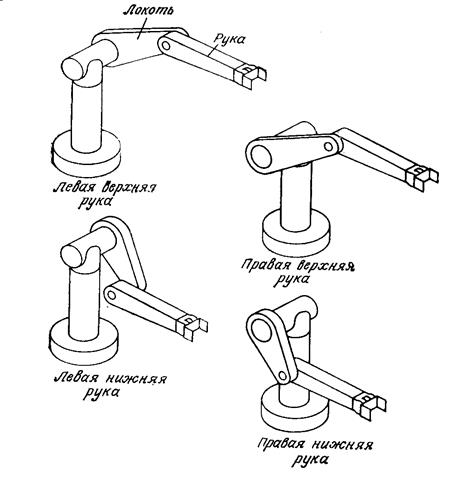
Рисунок 7.1. Определение различных конфигураций манипулятора
ПРАВАЯ РУКА: При неподвижном 3-м сочленении увеличение угла  приводит к увеличению координаты запястья по оси z 0.
приводит к увеличению координаты запястья по оси z 0.
ЛЕВАЯ РУКА: При неподвижном 3-м сочленении увеличение угла приводит к уменьшению координаты запястья по оси z 0.
ВЕРХНЯЯ (локоть выше запястья) РУКА: Положение запястья {ПРАВОЙ/ЛЕВОЙ} руки по отношению к системе координат плеча характеризуется {отрицательным/положительным} значением координаты по оси y 2.
НИЖНЯЯ (локоть ниже запястья) РУКА: Положение запястья {ПРАВОЙ/ЛЕВОЙ} руки по отношению к системе координат плеча характеризуется {положительным/отрицательным} значением координаты по оси y 2.
КИСТЬ ВНИЗ: Скалярное произведение единичного вектора s системы координат схвата и единичного вектора y 5 системы координат (х 5, у 5, z 5) положительно.
КИСТЬ ВЕРХ: Скалярное произведение единичного вектора s системы координат схвата и единичного вектора y 5 системы координат (х 5, у 5, z 5) отрицательно.
Каждый из трех индикаторов конфигурации звеньев может быть определен следующим образом:
РУКА=  (7-2)
(7-2)
ЛОКОТЬ=  (7-3)
(7-3)
ЗАПЯСТЬЕ=  (7-4)
(7-4)
В дополнение к этим индикаторам существует ПЕРЕКЛЮЧАТЕЛЬ:
ПЕРЕКЛЮЧАТЕЛЬ= 
(7-5)
Значения индикаторов и переключателя задаются исследователем до начала решения обратной задачи кинематики.
Date: 2015-08-15; view: 515; Нарушение авторских прав