Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Расчёт маховика
|
|
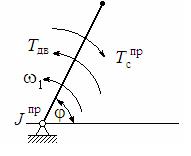
Сумма мощностей всех сил, действующих на звенья рычажного механизма, представляет собой периодическую функцию, зависящую от положения механизма. Колебание суммарной мощности вызывает колебание угловой скорости входного звена около его среднего значения. Уменьшить неравномерность вращения входного звена до заданных пределов можно, установив на это звено маховое колесо.
Так как механизм имеет одну степень свободы, движение всего механизма полностью определяется движением входного звена. Тогда для динамических расчетов можно заменить механизм его динамической моделью (рис. 2.9), состоящей из входного звена 1. Чтобы движение этого звена подчинялось тому же уравнению, что и движение механизма, считаем, что оно нагружено определённым для каждого положения приведенным моментом сопротивления 

 (2.17)
(2.17)
и обладает приведенным моментом инерции 
 . (2.18)
. (2.18)
 Момент
Момент  развивает ту же мощность, что и все приводимые силы, а звено приведения, обладающее моментом инерции
развивает ту же мощность, что и все приводимые силы, а звено приведения, обладающее моментом инерции  , имеет ту же кинетическую энергию, что и весь механизм.
, имеет ту же кинетическую энергию, что и весь механизм.
Определим и для положения начального механизма j1 = 150°.
Рис. 2. 9
Здесь  - плечи повернутых сил веса с плана скоростей для рассматриваемого положения механизма,
- плечи повернутых сил веса с плана скоростей для рассматриваемого положения механизма,  - угловая скорость звена 5, к которому приложен момент полезного сопротивления.
- угловая скорость звена 5, к которому приложен момент полезного сопротивления.
Построим планы скоростей для 12-ти положений механизма.
Исходные данные для расчета и его значения для 12-ти положений механизма приведены в таблице 2.2; для – в таблице 2.3.
По данным таблицы 2.2 строим график  в масштабе
в масштабе  ,
,  .
.
Момент инерции маховика рассчитываем с помощью диаграммы энергомасс. Для построения диаграммы используем значения  (таблица 2.3) и изменения кинетической энергии Δ Е механизма при перемещении кривошипа из нулевого положения в текущее. Величину Δ Е определяем как разность работ
(таблица 2.3) и изменения кинетической энергии Δ Е механизма при перемещении кривошипа из нулевого положения в текущее. Величину Δ Е определяем как разность работ
 , (2.19)
, (2.19)
где  - работа постоянного движущего момента
- работа постоянного движущего момента  ,
,  - работа приведенного момента сопротивления
- работа приведенного момента сопротивления  .
.
Работа приведенного момента сопротивления определяется методом графического интегрирования, основанного на формуле прямоугольников. Для этого выбираем полюсное расстояние Н =20.463 мм. Тогда масштабный коэффициент работ
 .
.
Найденные значения приведены ниже в таблице 2.4.
Постоянный движущий момент за цикл совершает работу
 ,
,
поэтому
 . (2.20)
. (2.20)
Тогда формулу (2.19) можно привести к виду
 , (2.21)
, (2.21)
где N =12 – число исследуемых положений механизма; n - номер текущего положения механизма. Найденные значения и Δ Е приведены в таблице 2.4.
При построении диаграммы (j) использованы масштабные коэффициенты  , .
, .
Для построения диаграммы энергомасс  воспользуемся величинами Δ Е и
воспользуемся величинами Δ Е и  таблиц 2.3 и 2.4, масштабные коэффициенты
таблиц 2.3 и 2.4, масштабные коэффициенты  и
и  . Диаграмма энергомасс
. Диаграмма энергомасс  приведена на рис.2.10.
приведена на рис.2.10.
Чтобы определить момент инерции маховика, необходимо построить касательные к этой диаграмме. Для расчета предельных углов  и
и  наклона касательных, вначале найдем предельные значения угловой скорости ведущего звена механизма:
наклона касательных, вначале найдем предельные значения угловой скорости ведущего звена механизма:
 ;
;
 .
.
Здесь коэффициент неравномерности хода  принят из диапазона заданных значений
принят из диапазона заданных значений  .
.
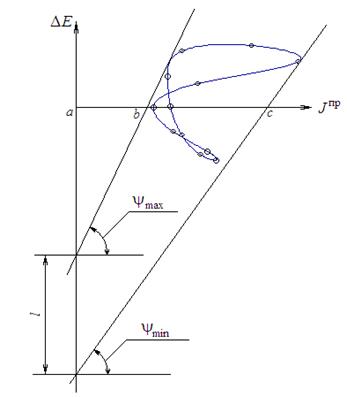
Рис. 2.10 Диаграмма энергомасс
Таблица 2.2
| Пол. | ||||||||||||
 , мм , мм
| 69.8 | 60.5 | 34.9 | -34.9 | -60.5 | -69.8 | -60.5 | -34.5 | 34.5 | 60.5 | ||
 , мм , мм
| 139.6 | 120.9 | 69.8 | -69.8 | -120.9 | -139.6 | -120.9 | -69.8 | 69.8 | 120.9 | ||
 , мм , мм
| 0.8 | -1.54 | -4.7 | -9.4 | -16.6 | -19.2 | -25.5 | -1.85 | 5.9 | 44.1 | 39.7 | 9.3 |
 , с-1 , с-1
| -0.69 | 1.15 | 2.23 | 3.02 | 3.57 | 3.75 | 3.41 | 2.19 | -0.67 | -5.68 | -8.05 | -4.21 |
 , Н·м , Н·м
| 311.5 | 303.9 | 219.4 | 76.9 | -79.4 | -194.2 | -267.6 | -247.7 | -135.8 | 139.4 | 280.0 | 297.0 |
Таблица 2.3
| Положение | ||||||||||||
 ,м\с ,м\с
| 3.49 | 4.02 | 4.77 | 4.89 | 4.38 | 3.76 | 3.49 | 3.76 | 4.38 | 4.89 | 4.77 | 4.02 |
 ,м\с ,м\с
| -3.16 | -4.97 | -4.89 | -3.50 | -1.73 | 1.73 | 3.50 | 4.89 | 4.97 | 3.16 | ||
 ,м\с ,м\с
| 6.98 | 6.41 | 5.25 | 4.89 | 5.73 | 6.64 | 6.98 | 6.64 | 5.73 | 4.89 | 5.25 | 6.41 |
 ,м\с ,м\с
| 0.41 | 0.69 | 1.34 | 1.81 | 2.14 | 2.25 | 2.04 | 1.31 | 0.40 | 3.41 | 4.83 | 2.53 |
| w1, с-1 | 13.962 | |||||||||||
| w2, с-1 | -4.65 | -4.09 | -2.43 | 2.43 | 4.09 | 4.65 | 4.09 | 2.43 | -2.43 | -4.09 | ||
| w4, с-1 | -0.69 | 1.15 | 2.23 | 3.02 | 3.57 | 3.75 | 3.41 | 2.19 | -0.67 | -5.68 | -8.05 | -4.21 |
| w5, с-1 | -0.69 | 1.15 | 2.23 | 3.02 | 3.57 | 3.75 | 3.41 | 2.19 | -0.67 | -5.68 | -8.05 | -4.21 |
 , кг ·м2 , кг ·м2
| 9.49 | 11.86 | 16.07 | 17.13 | 15.23 | 13.00 | 11.56 | 11.22 | 12.92 | 21.45 | 27.20 | 14.92 |
Таблица 2.4
| N | |||||||||||||

| 163.587 | 303.958 | 383.114 | 382.067 | 305.175 | 177.603 | 39.723 | -68.006 | -68.209 | 49.796 | 203.000 | 361.945 | |
| Δ Е | -133.425 | -243.634 | -292.627 | -261.419 | -154.365 | 3.369 | 171.412 | 309.303 | 339.667 | 251.825 | 128.782 |
Тогда тангенсы углов наклона касательных:
 ,
,
 .
.
Проведем касательные к диаграмме энергомасс под углами  и
и  и измерим отрезок l, отсекаемый этими касательными на оси Δ Е. Так как в данном случае концы отрезка l выходят за пределы чертежа, то из рис. 2.10 найдем:
и измерим отрезок l, отсекаемый этими касательными на оси Δ Е. Так как в данном случае концы отрезка l выходят за пределы чертежа, то из рис. 2.10 найдем:
 .
.
И, наконец, момент инерции маховика:
 .
.
Определим массу маховика, пренебрегая массами его ступицы и спиц (рис. 2.11). Принимая из конструктивных соображений соотношения  , получаем выражение для определения массы маховика
, получаем выражение для определения массы маховика
 ,
,
где  - плотность стали.
- плотность стали.
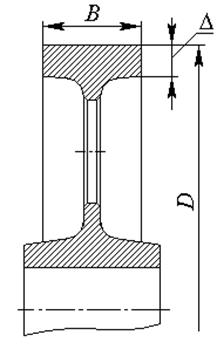
Рис. 2.11. Эскиз маховика
Момент инерции маховика:
 ;
;
тогда диаметр маховика
 ;
;
толщина Δ и ширина В обода:

Масса маховика
 .
.
2.5.1. Графики, полученные в программе BAUER:
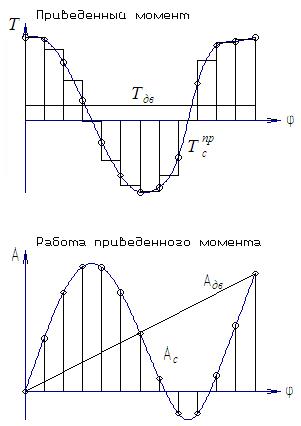
Рис. 2.12 зависимости приведенного момента и и
работы и  от угла поворота φ кривошипа.
от угла поворота φ кривошипа.
Рис. 2.13 зависимости приведенного момента инерции J пр,
приведенного момента и приращения кинетической энергии 
от угла поворота φ кривошипа и диаграмма энергомасс.
Ниже приведены распечатки результатов расчета маховика по программе BAUER.
In_file -
13.962 0.060
12 1
311.518 9.489
303.858 11.861
219.363 16.065
76.886 17.129
-79.420 15.206
-206.167 12.943
-267.644 11.559
-247.712 11.215
-135.800 12.923
139.440 21.447
279.982 27.198
296.960 14.918
13.9620 0.0600
108.00 3.60 9.00 0.00 9.00 0.30 90.00 3.60
-500
VS2_x VS2_y Om_2 VS3_x VS3_y Om_3 VS4_x VS4_y Om_4 VS5_x VS5_y Om_5 Omps_
0.0000 3.4905 -4.6540 0.0000 0.0000 0.0000 0.0000 6.9810 -0.6912 0.4127 0.0413 -0.6912 -0.6912
-2.6477 3.0229 -4.0877 -3.1587 0.0000 0.0000 -2.1368 6.0457 1.1509 -0.6862 -0.0772 1.1509 1.1509
-4.4425 1.7452 -2.4305 -4.9687 0.0000 0.0000 -3.9163 3.4905 2.2270 -1.3154 -0.2348 2.2270 2.2270
-4.8867 0.0000 0.0000 -4.8867 0.0000 0.0000 -4.8867 0.0000 3.0165 -1.7416 -0.4926 3.0165 3.0165
-4.0215 -1.7452 2.4305 -3.4953 0.0000 0.0000 -4.5477 -3.4905 3.5660 -1.9707 -0.8332 3.5660 3.5660
-2.2390 -3.0229 4.0877 -1.7280 0.0000 0.0000 -2.7499 -6.0457 3.7507 -1.9319 -1.1542 3.7507 3.7507
0.0000 -3.4905 4.6540 0.0000 0.0000 0.0000 0.0000 -6.9810 3.4054 -1.5955 -1.2764 3.4054 3.4054
2.2390 -3.0229 4.0877 1.7280 0.0000 0.0000 2.7499 -6.0457 2.1894 -0.9308 -0.9269 2.1894 2.1894
4.0215 -1.7452 2.4305 3.4953 0.0000 0.0000 4.5477 -3.4905 -0.6736 0.2762 0.2951 -0.6736 -0.6736
4.8867 0.0000 -0.0000 4.8867 0.0000 0.0000 4.8867 0.0000 -5.6822 2.5996 2.2058 -5.6822 -5.6822
4.4425 1.7452 -2.4305 4.9687 0.0000 0.0000 3.9163 3.4905 -8.0467 4.4007 1.9857 -8.0467 -8.0467
2.6477 3.0229 -4.0877 3.1587 0.0000 0.0000 2.1368 6.0457 -4.2121 2.4840 0.4657 -4.2121 -4.2121
0.0000 3.4905 -4.6540 0.0000 0.0000 0.0000 0.0000 6.9810 -0.6912 0.4127 0.0413 -0.6912 -0.6912
Параметры диаграмм для расчета маховика
┌────┬────────┬─────────┬─────────┬─────────┬─────────┬─────────┐
│ N│ Fi│ M│ m_│ A│ dE│ J│
├────┼────────┼─────────┼─────────┼─────────┼─────────┼─────────┤
│ 0│ 0.000│ 311.518│ │ 0.000│ 0.000│ 9.489│
│ 1│ 30.000│ 303.858│ 312.429│ 163.587│ -133.425│ 11.861│
│ 2│ 60.000│ 219.363│ 268.089│ 303.958│ -243.634│ 16.065│
│ 3│ 90.000│ 76.886│ 151.176│ 383.114│ -292.627│ 17.129│
│ 4│ 120.000│ -79.420│ -1.998│ 382.067│ -261.419│ 15.206│
│ 5│ 150.000│ -206.167│ -146.853│ 305.175│ -154.365│ 12.943│
│ 6│ 180.000│ -267.644│ -243.645│ 177.603│ 3.369│ 11.559│
│ 7│ 210.000│ -247.712│ -263.332│ 39.723│ 171.412│ 11.215│
│ 8│ 240.000│ -135.800│ -205.748│ -68.006│ 309.303│ 12.923│
│ 9│ 270.000│ 139.440│ -0.387│ -68.209│ 339.667│ 21.447│
│ 10│ 300.000│ 279.982│ 225.372│ 49.796│ 251.825│ 27.198│
│ 11│ 330.000│ 296.960│ 292.599│ 203.000│ 128.782│ 14.918│
│ 12│ 360.000│ 311.518│ 303.562│ 361.945│ 0.000│ 9.489│
└────┴────────┴─────────┴─────────┴─────────┴─────────┴─────────┘
Среднее значение движущего момента Md = 57.605 Н*м.
Обозначения:
N - номер положения механизма;
Fi - угловая координата звена приведения;
M - приведенный момент сопротивления;
m_ - среднее значение величины M на соответствующем участке интегрирования;
A - работа сил сопротивления;
dE - приращение кинетической энергии;
J - приведенный момент инерции.
───────────────────────────────────────────────────────────────────
При средней угловой скорости звена приведения Om = 13.962 1/с
коэффициент неравномерности Delta = 0.06 обеспечивается при моменте
инерции маховика Jm = 113.16 кг*(м*м).
Date: 2015-07-27; view: 1135; Нарушение авторских прав