Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Двигатель с параллельным возбуждением
|
|
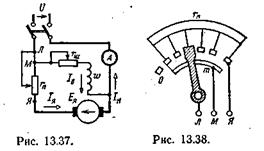
Цепи якоря и возбуждения у двигателя с параллельным возбуждением соединены между собой параллельно. Следовательно, ток возбуждения такого двигателя не зависит от тока якоря и от нагрузки двигателя.
На рис. 13.37 показана основная схема соединений двигателя о пусковым rп и регулировочным rш реостатами. Пусковой реостат необходим для того, чтобы ограничить ток в якоре при пуске, пока ЭДС якоря равна нулю или мала, так как согласно (13.6)
Iя = (U - Eя)/(rя + rп).
Электродвижущая сила Ея пропорциональна потоку Ф; желательно, чтобы при пуске двигателя ЭДС Ея возрастала возможно быстрее.
По этой причине при пуске обмотку возбуждения следует включать сразу на полное напряжение сети при выведенном регулировочном реостате гш.. Вращающий момент двигателя (13.2) также пропорционален магнитному потоку Ф, поэтому если пуск двигателя происходит при наибольшем потоке, то наибольшего значения достигает и вращающий момент, что существенно облегчает процесс пуска, так как соответственно может быстрее снизиться пусковой ток.
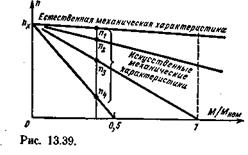
В схеме на рис. 13.38 такое соединение обмотки возбуждения предусмотрено. Пусковой реостат снабжен металлической дугой т, которой касается скользящий контакт, укрепленный на рукоятке реостата. Пока рукоятка эта стоит на холостом контакте О пускового реостата, обе цепи двигателя выключены. Затем, когда во время пуска рукоятка перемещается по контактам реостата, обмотка возбуждения двигателя все время находится под полным напряжением сети.
Первый контакт пускового реостата соединен с медной дугой т, благодаря чему при выключении двигателя обмотка возбуждения оказывается замкнутой на якорь и пусковой реостат. Тем самым
предупреждается возникновение большой ЭДС самоиндукции при размыкании цепи возбуждения, так как обмотка возбуждения обладает большой индуктивностью. Благодаря наличию замкнутого контура с резистором при выключении двигателя энергия магнитного поля обмотки возбуждения преобразуется в этом резисторе в тепло. Секции пускового реостата рассчитываются так, чтобы при нормальном пуске ток якоря не превышал примерно двойного значения номинального тока якоря. Ток якоря при работе двигателя равен 1я=(U — Ея)/rя.
Так как Ея = сЕФп, то
n = (U - rяIя)/сEФ (13.7)
— это уравнение частоты вращения двигателя с параллельным возбуждением.
Общее уравнение электромагнитного момента (13.2) машины постоянного тока определяет вращающий момент двигателя с параллельным возбуждением:
| (13.8) |
Мвр = смФ1я
Этот момент уравновешивает тормозной момент, приложенный к валу двигателя (статический момент).
При увеличении нагрузки на валу двигателя сначала равновесие моментов нарушается и двигатель несколько уменьшает частоту вращения. Но это вызывает уменьшение Ея, а следовательно, и увеличение Iя. Пропорционально Iя возрастает вращающий момент, и при немного понизившейся частоте вращения п равновесие моментов восстанавливается. На основании (13.7) и (13.8) зависимость п от вращающего момента можно выразить также следующим образом:
n =  - MBP
- MBP  .
.
(13.9)
Реакция якоря может оказывать некоторое влияние на работу двигателя. При увеличении тока якоря Iя уменьшается главный магнитный поток Ф (в наибольшей степени у двигателей без дополнительных полюсов). Согласно уравнению (13.9) ослабление потока увеличивает п, а следовательно, противодействует снижению частоты вращения, вызываемому увеличением rяIя. Вместе с тем ослабление потока уменьшает вращающий момент, а следовательно, вызывает увеличение тока якоря, необходимое для поддержания равновесия моментов.
Большинство двигателей с параллельным возбуждением для компенсации влияния реакции якоря на главный магнитный поток снабжается дополнительной последовательной обмоткой возбуждения из небольшого числа витков, называемой стабилизирующей обмоткой. Она соединяется согласно с параллельной обмоткой возбуждения и на вид характеристик двигателя практически не влияет, поэтому двигатели с такой дополнительной обмоткой рассматриваются как двигатели с параллельным возбуждением, хотя фактически в них осуществлено смешанное возбуждение. Однако наличие этой дополнительной обмотки необходимо учитывать, если использовать двигатель для каких-либо специальных целей.
Следовательно, если считать магнитный поток Ф неизменным, то (13.9) — естественная механическая характеристика двигателя с параллельным возбуждением п = F (М), — изображается прямой линией, слегка наклоненной в сторону оси абсцисс (рис. 13.39). При изменении нагрузки на валу двигателя от холостого хода до номинальной частота вращения большинства двигателей параллельного возбуждения уменьшается лишь на 3—8 % (тем меньше, чем больше номинальная мощность двигателя). Таким образом, естественную механическую характеристику двигателей с параллельным возбуждением следует считать жесткой.
Угол наклона механической характеристики можно изменить, включив последовательно с якорем реостат г. В этом случае уравнение частоты вращения двигателя будет:
п =  . (13.10)
. (13.10)
Изменяя сопротивление реостата r, можно получить семейство искусственных механических характеристик (реостатных характеристик) более мягких, чем естественная механическая характеристика двигателя. Все эти характеристики будут пересекать ось ординат в одной и той же точке, определяемой условием Iя = 0 или Ея = сЕпх Ф = U; здесь пх — частота вращения якоря при идеальном холостом ходе двигателя. Заметим, что идеальный холостой ход двигателя соответствует отсутствию тормозного момента на его валу. Так как трение в подвижных частях двигателя всегда создает тормозной момент, то идеальный холостой ход можно получить только воздействием на вал машины внешнего вращающего момента от вспомогательного двигателя.
Если при неизменном моменте на валу постепенно увеличивать сопротивление реостата г в цепи якоря, то точка п, показывающая на диаграмме рис. 13.39 частоту вращения двигателя, будет перемещаться с одной характеристики на другую (точки n1 — n4). Следовательно, посредством реостата r можно регулировать частоту вращения двигателя. Однако такое регулирование неэкономично, так как ток в цепи регулировочного реостата равен току якоря Iя а это обусловливает значительную мощность потерь rI2я. По этой причине регулирование включением реостата в цепь якоря применяется лишь для двигателей небольших мощностей. По существу реостатом регулируется напряжение на якоре. Положительной стороной такого регулирования частоты вращения изменением напряжения является постоянство тока якоря и вращающего момента, развиваемого двигателем. Для большого числа приводов характерно постоянство нагрузочного момента при изменении частоты вращения. Следовательно, при работе двигателя на такой привод регулирование частоты вращения изменением напряжения не будет вызывать изменения тока якоря и последний не будет перегружаться по току. По этой причине регулирование изменением напряжения называют регулированием с постоянным предельно допустимым моментом.

Уравнение (13.10) показывает, что частота вращения п обратно пропорциональна главному магнитному потоку Ф, а этот поток, пока магнитная цепь машины не насыщена, можно считать пропорциональным току возбуждения Iв. Следовательно, частоту вращения двигателя можно регулировать изменением тока возбуждения, для чего в цепь возбуждения вводится реостат гш. Зависимость п = F (IB) носит гиперболический характер; на рис. 13.40 показана эта характеристика двигателя при холостом ходе.
Процесс регулирования при постоянном тормозном моменте на валу двигателя протекает следующим образом.
Увеличение сопротивления реостата гш уменьшает ток возбуждения Iв, вследствие чего уменьшается магнитный поток Ф и индуктируемая им ЭДС Ея в обмотке якоря. Понижение ЭДС Ея вызывает увеличение тока в обмотке якоря:
Iя = (U-Ея)/r2
а следовательно, увеличение вращающего момента и частоты вращения двигателя. Благодаря этому равновесие моментов и равновесие электрическое
U = Eя + rя1я
восстанавливаются при возросших частоте вращения п и токе якоря IЯ. Таким образом, при М = const увеличение п двигателя посредством ослабления магнитного потока вызывает увеличение IЯ а следовательно, некоторую перегрузку током коллектора и обмотки якоря.
Иные условия имеют место, если нагрузка на валу двигателя требует постоянства мощности Рн. Так как Рн = М  вр = смФ1яп
вр = смФ1яп  /30 = кФ1яп, то уменьшение магнитного потока будет вызывать увеличение частоты вращения и уменьшение вращающего момента при неизменном токе /я. Следователь
/30 = кФ1яп, то уменьшение магнитного потока будет вызывать увеличение частоты вращения и уменьшение вращающего момента при неизменном токе /я. Следователь
но, регулирование частоты вращения двигателя путем изменения тока возбуждения выгодно при постоянстве мощности на валу.
По этой причине такое регулирование частоназывают регулированием с постоянной предельно допустимой мощностью.
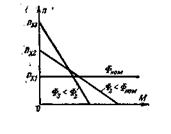
Рис. 13.41.
Механические характеристики двигателя при различном возбуждении наклонены неодинаково к оси абсцисс (рис. 13.41). Чем меньше магнитный поток, тем больше при том же вращающем моменте М = смФ1в должен быть ток Iя, а следовательно, тем большее изменение п = (U — rяIя)/сEФ вызывает изменение нагрузки, т. е. с ослаблением магнитного потока механическая характеристика двигателя становится мягче.
Так как ток возбуждения Iв относительно мал — примерно (2—3 %) Iя, то и дополнительные мощности потерь rBI2B при регулировании частоты вращения ослаблением магнитного потока Ф относительно малы, благодаря чему такое регулирование весьма экономично. Однако значительное увеличение частоты вращения может обусловливать перегрузку коллектора и якоря по току, сильное ухудшение условий коммутации, возникновение опасных механических центробежных сил в якоре, и т. п. По этим причинам серийные двигатели параллельного возбуждения рассчитываются на регулирование частоты вращения в пределах до 2: 1. Возможность регулирования частоты вращения нагруженного двигателя в более широких пределах требует соответствующих конструктивных изменений машины. Такие изменения делаются заводами-изготовителями по специальным заказам, и в СССР выпускаются двигатели, рассчитанные на регулирование частоты вращения посредством изменения тока возбуждения в пределах 2,5: 1; 3: 1; 4: 1.
Очень широкие пределы регулирования частоты вращения и безреостатный пуск двигателя с параллельным возбуждением обеспечивает применение системы П—Д (преобразователь—двигатель). Особенно целесообразно ее применение для больших мощностей, например для приводов прокатных станов. В качестве преобразователей могут использоваться генераторы постоянного тока, тиристорные выпрямители и т. д.
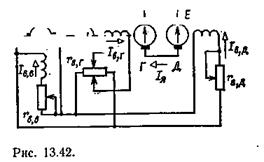
При использовании генератора постоянного тока в качестве преобразователя весь агрегат системы Г—Д (генератор—двигатель) стоит из четырех машин (рис.13.42), асинхронный (или синхронный) двигатель АД вращает с постоянной частотой мощный генератор постоянного тока Г и небольшой генератор В с параллельным возбуждением, служащий возбудителем для установки.
Цепь якоря генератора Г замкнута непосредственно на цепь якоря двигателя Д. Цепи возбуждения генератора и двигателя питаются от возбудителя В. Все операции управления частотой вращения двигателя осуществляются воздействием только на цепи возбуждения машин. Напряжение генератора регулируется с помощью реостата гв.г, включенного в его цепь возбуждения. Для того чтобы иметь возможность изменять направление тока возбуждения генератора, этот реостат часто снабжают двумя подвижными контактами и включают по схеме потенциометра. Изменение направления тока возбуждения генератора изменяет напряжения на выводах генератора и, следовательно, вызывает реверсирование двигателя. Для пуска двигателя напряжение генератора понижается регулированием возбуждения генератора.
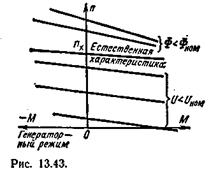
Пределы регулирования изменением напряжения для установки средней мощности — примерно от 5:1 до 10: 1. Механические характеристики в пределах этой области регулирования — параллельные прямые (рис. 13.43), только их угол наклона к оси абсцисс несколько больше, чем угол наклона естественной механической характеристики двигателя. Меньшая жесткость характеристики является следствием понижения напряжения генератора с увеличением нагрузки из-за влияния внутреннего сопротивления якоря гЯг г генератора. Таким образом, уравнение частоты вращения двигателя в системе Г—Д будет:
| (13.11) |
n=  =
=  - Mвр
- Mвр  .
.
Уменьшение тормозного момента до нуля соответствует идеальному холостому ходу. Если далее воздействовать на вал машины внешним вращающим моментом (М < 0), то машина перейдет из режима двигателя в режим генератора.
Дальнейшее расширение пределов регулирования частоты вращения системы Г—Д достигается изменением тока возбуждения двигателя. Ослаблением магнитного потока двигателя можно обеспечить регулирование в пределах примерно до 4: 1, а следовательно, для системы Г—Д в целом пределы регулирования будут от 12: 1 до 16: 1.
Регулирование в пределах второй зоны, т. е. ослабление магнитного потока, экономически выгодно при постоянстве мощности привода.
Недостатками системы Г—Д являются большие габариты, низкий КПД из-за потерь в трех преобразователях энергии и большая инерционность регулирования.
Во многих современных установках система Г—Д заменена тиристорной системой с фазовым регулированием.
Для машины с параллельным возбуждением может быть построена универсальная характеристика. Если посредством какого-либо независимого двигателя вращать якорь с частотой вращения, превосходящей частоту вращения идеального холостого хода пх, то направление тока в якоре изменится и машина будет работать как генератор на сеть постоянного тока. Если же приложить к валу двигателя достаточно большой тормозной момент, то двигатель остановится, а если тормозной момент активный, создаваемый, например, опускающимся достаточно большим грузом, то машина из режима двигателя перейдет в режим электромагнитного тормоза. В этом случае ток в якоре
1я = (U + Ея)/(rя + r), (13.12)
где r — сопротивление реостата, который необходимо включить в цепь якоря, чтобы ограничить ток.
При номинальном напряжении и отсутствии реостата ток в якоре при остановке в режиме тормоза был бы слишком большим и произошло бы разрушение коллектора и обмотки якоря. Торможение, получаемое таким образом, именуется торможением противовключением. Наряду с ним для быстрой остановки привода используется режим динамического торможения. Вращающийся якорь отключается от сети и замыкается на некоторый резистор. В этих условиях ЭДС якоря играет роль ЭДС генератора. Она создает ток в якоре и резисторе, а этот ток вызывает возникновение электромагнитного тормозного момента.
Date: 2015-07-24; view: 1125; Нарушение авторских прав