Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Вопрос 6. Детерминированные модели. D-схема
|
|
Непрерывно-детерминированные модели (D-схемы)
особенностью непрерывно-детерминированного подхода является применение в качестве математических моделей дифференциальные уравнений.
Обычно в таких математических моделях в качестве независимой переменной, от которой зависят неизвестные искомые функции, служит время t.
Тогда математическое соотношение для детерминированных систем в общем виде будет
 (6.1)
(6.1)
где  и
и  — n -мерные векторы;
— n -мерные векторы;  — вектор-функция, которая определена на некотором (n + 1) -мерном
— вектор-функция, которая определена на некотором (n + 1) -мерном  множестве и является непрерывной.
множестве и является непрерывной.
Так как математические схемы такого вида отражают динамику изучаемой системы, т. е. ее поведение во времени, то они называются D-схемами (англ. dynamic). В простейшем случае обыкновенное дифференциальное уравнение имеет вид
 . (6.2)
. (6.2)
Наиболее важно для системотехники приложение D-схем в качестве математического аппарата в теории автоматического управления. Для иллюстрации особенностей построения и применения D-схем рассмотрим простейший пример формализации процесса функционирования двух элементарных систем различной физической природы:
механической SM (колебания маятника, рис. 1);
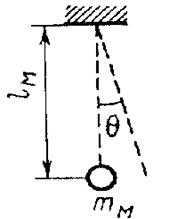
Рис 1.
электрической SX (колебательный контур, рис. 2).
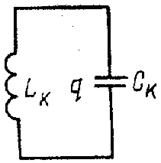
Рис 2.
Процесс малых колебаний маятника описывается обыкновенным дифференциальным уравнением
 ,
,
где  — масса и длина подвеса маятника; g — ускорение свободного падения; в
— масса и длина подвеса маятника; g — ускорение свободного падения; в  — угол отклонения маятника в момент времени t. Из этого уравнения свободного колебания маятника можно найти оценки интересующих характеристик.
— угол отклонения маятника в момент времени t. Из этого уравнения свободного колебания маятника можно найти оценки интересующих характеристик.
Аналогично, процессы в электрическом колебательном контуре описываются обыкновенным дифференциальным уравнением
 ,
,
где  — индуктивность и емкость конденсатора; q(t) — заряд конденсатора в момент времени t.
— индуктивность и емкость конденсатора; q(t) — заряд конденсатора в момент времени t.
Из этого уравнения можно получить различные оценки характеристик процесса в колебательном контуре.
Очевидно, что, введя обозначения  , h1 = 0,
, h1 = 0,  ,
,  , получим обыкновенное дифференциальное уравнение второго порядка, описывающее поведение замкнутой системы:
, получим обыкновенное дифференциальное уравнение второго порядка, описывающее поведение замкнутой системы:
 (6.3)
(6.3)
где h0, hl, h2 — параметры системы; z(t) — состояние системы в момент времени t.
Таким образом, поведение этих двух объектов может быть исследовано на основе общей математической модели (6.3). Кроме того, необходимо отметить, что поведение одной из систем может быть проанализировано с помощью другой. Например, поведение маятника (системы SM) может быть изучено с помощью электрического колебательного контура (системы SX).
Если изучаемая система S, т. е. маятник или контур, взаимодействует с внешней средой Е, то появляется входное воздействие x(t) (внешняя сила для маятника и источник энергии для контура) и непрерывно-детерминированная модель такой системы будет иметь вид
 (6.4)
(6.4)
С точки зрения общей схемы математической модели x(t) является входным (управляющим) воздействием, а состояние системы S в данном случае можно рассматривать как выходную характеристику, т. е. полагать, что выходная переменная совпадает с состоянием системы в данный момент времени y = z.
При решении задач системотехники важное значение имеют проблемы управления большими системами. Следует обратить внимание на системы автоматического управления — частный случай динамических систем, описываемых D-схемами и выделенных в отдельный класс моделей в силу их практической специфики.
Описывая процессы автоматического управления, придерживаются обычно представления реального объекта в виде двух систем: управляющей и управляемой (объекта управления). Структура многомерной системы автоматического управления общего вида представлена на (рис. 3), где обозначены эндогенные переменные:  — вектор входных (задающих) воздействий;
— вектор входных (задающих) воздействий;  — вектор возмущающих воздействий;
— вектор возмущающих воздействий;  — вектор сигналов ошибки;
— вектор сигналов ошибки;  — вектор управляющих воздействий; независимые переменные:
— вектор управляющих воздействий; независимые переменные:  — вектор состояний системы S;
— вектор состояний системы S;  — вектор выходных s переменных, обычно
— вектор выходных s переменных, обычно  .
.
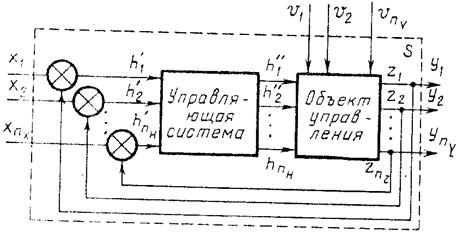
Рис 3. Структура системы автоматического управления
Современная управляющая система — это совокупность программно-технических средств, обеспечивающих достижение объектом управления определенной цели. Насколько точно объект управления достигает заданной цели, можно судить для одномерной системы по координате состояния y(t). Разность между заданным yзад(t) и действительным y(t) законами изменения управляемой величины есть ошибка управления h'(t)= yзад(t) - y(t).
Системы, для которых ошибки управления h'(t) = 0 во все моменты времени, называются идеальными. На практике реализация идеальных систем невозможна. Таким образом, ошибка h'(t) — необходимый субстрат автоматического управления, основанного на принципе отрицательной обратной связи, так как для приведения в соответствие выходной переменной у(t) ее заданному значению используется информация об отклонении между ними. Задачей системы автоматического управления является изменение переменной у(t) согласно заданному закону с определенной точностью (с допустимой ошибкой). При проектировании и эксплуатации систем автоматического управления необходимо выбрать такие параметры системы S, которые обеспечили бы требуемую точность управления, а также устойчивость системы в переходном процессе.
Если система устойчива, то представляют практический интерес поведение системы во времени, максимальное отклонение регулируемой переменной у(t) в переходном процессе, время переходного процесса и т. п. Выводы о свойствах систем автоматического управления различных классов можно сделать по виду дифференциальных уравнений, приближенно описывающих процессы в системах. Порядок дифференциального уравнения и значения его коэффициентов полностью определяются статическими и динамическими параметрами системы S.
Таким образом, использование D-схем позволяет формализовать процесс функционирования непрерывно-детерминированных систем S и оценить их основные характеристики, применяя аналитический или имитационный подход, реализованный в виде соответствующего языка для моделирования непрерывных систем или использующий аналоговые и гибридные средства вычислительной техники.
Date: 2015-07-17; view: 535; Нарушение авторских прав