Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Общие сведения о двигателях постоянного тока
|
|
Двигатели постоянного тока находят широкое применение в промышленных, транспортных, крановых и других установках, где требуется широкое плавное регулирование частоты вращения. Одна и та же электрическая машина может работать как в режиме генератора, так и в режиме двигателя. Это свойство электрических машин называют обратимостью.
Предположим, что к двигателю подведено напряжение UСЕТИ = const. При заданной на рисунке 16.1 полярности полюсов и направлении тока IЯ в якоре (обмотка якоря показана только одним проводником) на валу двигателя создается вращающий электромагнитный момент М, направленный против вращения часовой стрелки. Под действием этого момента двигатель вращается в направлении момента с постоянной частотой п.

Рисунок 16.1 – Направление момента и противо-э.д.с. обмотки якоря двигателя
Для двигателя, работающего с постоянной частотой вращения, можно составить уравнение э.д.с.
UСЕТИ=ЕЯ+IЯRЯ,
где ЕЯ и IЯ – э.д.с и ток, соответствующие установившемуся режиму работы;
IЯRЯ – падение напряжения в сопротивлениях цепи якоря двигателя.
Уравнение моментов двигателя. Электромагнитный момент двигателя
М=(1/π)NIЯpФ/(2а)=CМIЯФ (16.1)
создается в результате взаимодействия основного магнитного поля Ф и тока в обмотке якоря IЯ и расходуется на преодоление тормозящих моментов:
а) момента х.х. М0;
б) полезного момента М2;
в) динамического момента Mj.
Момент х.х. М0 существует при любом режиме работы двигателя и определяется трением в подшипниках, трением щеток о коллектор, вентиляционными потерями и потерями в стали. Полезный момент М2 определяется свойствами рабочей машины и характером производственного процесса. Динамический момент возникает при всяком изменении частоты вращения двигателя
Mj=±J(dω/d), (16.2)
где J – момент инерции всех вращающихся частей;
ω – угловая скорость вращения якоря.
Если частота вращения двигателя увеличивается, то момент Еj положителен и, складываясь с моментами М0 и М2, увеличивает тормозной момент на валу двигателя. При уменьшении п момент Mj отрицателен и уменьшает общий тормозной момент. Зависимость между вращающим и тормозным моментами двигателя на его валу определяется законом равновесия моментов: в любых условиях работы двигателя эти моменты находятся во взаимном равновесии, т.е. равны друг другу по величине, но направлены в противоположные стороны. При n=const момент Mj=0 и тогда
М=М0+М2=МСТ (16.3)
где МСТ – статический момент сопротивления на валу двигателя.
Энергетическая диаграмма двигателя. На рисунке 16.2 изображена энергетическая диаграмма двигателя параллельного возбуждения, работающего в установившемся режиме, т.е. при n=const. К двигателю из сети подводится мощность P1=UCI, которая покрывает потери в цепи возбуждения RВ и электрические потери в цепи якоря I2ЯRЯ, а оставшаяся ее часть составляет электромагнитную мощность якоря РЭМ=ЕЯIЯ преобразующуюся в полную механическую мощность РМ двигателя. Полезная механическая мощность на валу двигателя Р2 меньше полной механической мощности РМ на величину мощности P0 необходимой для покрытия потерь в стали РС и механических потерь РМЕХ, т.е.
Р2=РМ – (РС+РМЕХ).

Рисунок 16.2 – Энергетическая диаграмма двигателя
параллельного возбуждения
В зависимости от способа включения обмотки возбуждения и обмотки якоря различают следующие типы двигателей постоянного тока:
а) параллельного возбуждения;
б) последовательного возбуждения;
в) смешанного возбуждения, в которых имеются две обмотки возбуждения: параллельная и последовательная. Двигатели постоянного тока оцениваются по совокупности следующих видов характеристик: пусковых, рабочих, регулировочных и механических.
Пусковые характеристики.
Пусковые характеристики определяются следующими величинами:
а) пусковым током IПУСК характеризуемым отношением IПУСК / IНОМ;
б) пусковом моментом МПУСК, характеризуемым отношением МПУСК / МНОМ
в) плавностью пусковой операции;
г) временем пуска в ход tПУСК;
д) экономичностью операции, определяемой стоимостью пусковой аппаратуры.
В начальный момент пуска двигателя его якорь неподвижен, противо-э.д.с. в обмотке якоря равна нулю и ток в якоре двигателя IЯ=UС / RЯ. Сопротивление цепи якоря невелико, поэтому пусковой ток превышает номинальный в 20 и более раз. Резкий скачок тока при пуске создает на валу двигателя большой пусковой момент, который может вызвать механические разрушения, как самого двигателя, так и исполнительного механизма, привести к резкому падению напряжения в сети и вызвать интенсивное искрение под щетками. Поэтому при пуске двигателя в ход для ограничения пускового тока применяют пусковые реостаты, включаемые последовательно в цепь якоря (см. рисунок 16.3). По мере увеличения частоты вращения якоря противо-э.д.с. увеличивается, а ток якоря уменьшается, поэтому сопротивление реостата следует уменьшить так, чтобы в конце пуска оно было полностью выведено, и чтобы пусковой ток превышал номинальный не более чем в два-три раза.
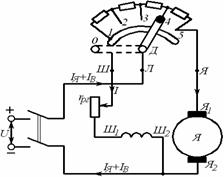
Рисунок 16.3 – Схема включения пускового реостата в цепь двигателя
параллельного возбуждения
Date: 2016-07-25; view: 398; Нарушение авторских прав