Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Дискретно-стохастические модели (Р-схемы)
|
|
Рассмотрим особенности построения математических схем при дискретно-стохастическом подходе к формализации процесса функционирования исследуемой системы S. Так как сущность дискретизации времени при этом подходе остается аналогичной рассмотренным выше конечным автоматам, то влияние фактора стохастичности проследим также на разновидности таких автоматов, а именно на вероятностных (стохастических) автоматах.
Основные соотношения. В общем виде вероятностный автомат (англ.probabilistic automat) можно определить как дискретный потактный преобразователь информации с памятью, функционирование которого в каждом такте зависит только от состояния памяти в нем и может быть описано статистически.
Применение схем вероятностных автоматов (Р-схем) имеет важное значение для разработки методов проектирования дискретных систем, проявляющих статистически закономерное случайное поведение, для выяснения алгоритмических возможностей таких систем и обоснования границ целесообразности их использования, а также для решения задач синтеза по выбранному критерию дискретных стохастических систем, удовлетворяющих заданным ограничениям.
Введем математическое понятие Р-автомата, используя понятия, введенные для F -автомата. Рассмотрим множество G, элементами которого являются всевозможные пары  ,где
,где  и
и  — элементы входного подмножества X и подмножества состояний Z соответственно. Если существуют две такие функции
— элементы входного подмножества X и подмножества состояний Z соответственно. Если существуют две такие функции  и
и  то с их помощью осуществляются отображения
то с их помощью осуществляются отображения  и
и  , то говорят, что
, то говорят, что  определяет автомат детерминированного типа.
определяет автомат детерминированного типа.
Введем в рассмотрение более общую математическую схему. Пусть Ф — множество всевозможных пар вида  , где
, где  , — элемент выходного подмножества Y. Потребуем, чтобы любой элемент множества G индуцировал на множестве Ф некоторый закон распределения следующего вида:
, — элемент выходного подмножества Y. Потребуем, чтобы любой элемент множества G индуцировал на множестве Ф некоторый закон распределения следующего вида:
| Элементы из Ф | … |  … …
| 
| … | 
| 
|

| … | 
|
| … | 
| 
|
6.3. ДИСКРЕТНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ
(Р-СХЕМЫ)
Рассмотрим особенности построения математических схем при дискретно-стохастическом подходе к формализации процесса функционирования исследуемой системы S. Так как сущность дискретизации времени при этом подходе остается аналогичной рассмотренным в § 2.3 конечным автоматам, то влияние фактора стохастичности проследим также на разновидности таких автоматов, а именно на вероятностных (стохастическиих) автоматах.
Основные соотношения. В общем виде вероятностный автомат (англ. probabilistic automat) можно определить как дискретный потактный преобразователь информации с памятью, функционирование которого в каждом такте зависит только от состояния памяти в нем и может быть описано статистически.
Применение схем вероятностных автоматов (Р-схем) имеет важное значение для разработки методов проектирования дискретных систем, проявляющих статистически закономерное случайное поведение, для выяснения алгоритмических возможностей таких систем и обоснования границ целесообразности их использования, а также для решения задач синтеза по выбранному критерию дискретных стохастических систем, удовлетворящих заданным ограничениям.
Введем математическое понятие Р-автомата, используя понятия, введенные для F-автомата. Рассмотрим множество G, элементами которого являются всевозможные пары (xi z), где х и z, —элементы входного подмножества X и подмножества состояний Z соответственно. Если существуют две такие функции и ф, то с их помощью осуществляются отображения G->Z и G->Y, то говорят, что F= <Z, X, Y, φ, ψ, > определяет автомат детерминированного типа.
Введем в рассмотрение более общую математическую схему. Пусть Ф — множество всевозможных пар вида (zk, уj), где ys элемент выходного подмножества Y. Потребуем, чтобы любой элемент множества G индуцировал на множестве Ф некоторый закон распределения следующего вида:


При этом— вероятности перехода автомата в состояние zk и появления на выходе сигнала yk если он был в состоянии zs и на его вход в этот момент времени поступил сигнал х,. Число таких распределений, представленных в виде таблиц, равно числу элементов множества G. Обозначим множество этих таблиц через В. Тогда четверка элементов P=<Z, X, У, В> называется вероятностным автоматом (Р-автоматом).
Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и Z, что можно представить соответственно в виде:
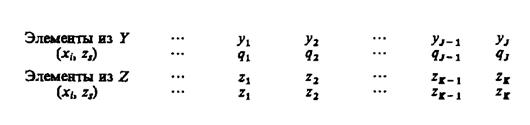

При этом— вероятности перехода Р-автомата в состояние zk и появления выходного сигнала ук при условии, что Р-автомат находился в состоянии z, и на его вход поступил входной сигнал х,.
Если для всех к и j имеет место соотношение qkzi=bkJ, то такой Р-автомат называется вероятностным автоматом Мили. Это требование означает выполнение условия независимости распределений для нового состояния Р-автомата и его выходного сигнала.
Пусть теперь определение выходного сигнала Р-автомата зависит лишь от того состояния, в котором находится автомат в данном такте работы. Другими словами, пусть каждый элемент выходного подмножества Y индуцирует распределение вероятностей выходов, имеющее следующий вид:
 I
I
Здесь — вероятность появления выходного сигнала у, при условии, что Р-автомат находился в состоянии zk.
Возможные приложения. Если для всех к и i имеет место соотношение zkSj=bkh то такой Р-автомат называется вероятностным автоматом Мура. Понятие Р-автоматов Мили и Мура введено по аналогии с детерминированным F-автоматом, задаваемым P=<Z, X, Y, φ, ψ,>. Частным случаем Р-автомата, задаваемого как P=(Z,X, Y, B\ являются автоматы, у которых либо переход в новое состояние, либо выходной сигнал определяются детерминировано.
Если выходной сигнал Р-автомата определяется детерминировано, то такой автомат называется Y-детерминированным вероятностным автоматом. Аналогично, Z-demepминированным вероятностным автоматом называется Р-автомат, у которого выбор нового состояния является детерминированным.
Пример 2.4 Рассмотрим У-детерминированный Р-автомат, который задан таблицей переходов (табл. 2.6) и таблицей выходов:

Первую из этих таблиц можно представить в виде квадратной матрицы размерности К х К, которую будем называть матрицей переходных вероятностей или просто матрицей переходов Р-автомата. В общем случае такая матрица переходов имеет вид

Будем считать, что до начала работы (до нулевого такта времени)
Р-автомат всегда находится в состоянии z0 и в нулевой такт времени меняет состояние в соответствии с распределением D. Дальнейшая смена состояний Р-автомата определяется матрицей переходов РР. Информацию о начальном состоянии Р-автомата удобно нести в матрицу Рр, увеличив ее размерность до (K+1)х(K+1). При этом первая строка такой матрицы, сопоставляемая состоянию z0 , будет иметь вид (0, d1 d2,.. „., dK), а первый столбец будет нулевым.
Описанный У-детермивированный Р-автомат можно задать в виде ориентированного графа, вершины которого сопоставляются состояниям автомата, а дуги —возможным переходам из одного состояния в другое. Дуги имеют веса, соответствующие вероятностям перехода pj, а около вершин графа пишутся значения выходных сигналов, индуцируемых этими состояниями.

На рис. 2.5 показан граф переходов этого автомата. Требуется оценить суммарные финальные вероятности пребывания этого Р-автомата в состояниях z2 в z,3.
При использовании аналитического подхода можно записать известные соотношения из теории марковских цепей и получить систему уравнений для определения финальных вероятностей. При этом начальное состояние г0 можно не учитывать, так как начальное распределение не оказывает влияния на значения финальных вероятностей. Тогда имеем

Добавим к этим уравнениям условие нормировки с1+с2 +c3+с4 =1. Тогда, решая систему уравнений, получим c1= 5/23, с2=8/23, с3 = 5/23, с4 = 5/23. Таким образом, с2+сэ= 13/23=0,5652. Другими словами, при бесконечной работе заданного в этом примере У-детерминированного Р-аетомата на его выходе формируется двоичная последовательность с вероятностью появления единицы, равной 0,5652.
 Подобные Р-автоматы могут использоваться как генераторы марковских последовательностей, которые необходимы при построении и реализации процессов функционирования систем S или воздействий внешней среды Е. Для оценки различных характеристик исследуемых систем, представляемых в виде Р-схем, кроме рассмотренного случая аналитических моделей можно применять и имитационные модели, реализуемые, например, методом статистического моделирования.
Подобные Р-автоматы могут использоваться как генераторы марковских последовательностей, которые необходимы при построении и реализации процессов функционирования систем S или воздействий внешней среды Е. Для оценки различных характеристик исследуемых систем, представляемых в виде Р-схем, кроме рассмотренного случая аналитических моделей можно применять и имитационные модели, реализуемые, например, методом статистического моделирования.
6.4. НЕПРЕРЫВНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ
(Q-СХЕМЫ)
Особенности непрерывно-стохастического подхода рассмотрим на примере использования в качестве типовых математических схем систем массового обслуживания (англ. queueing system), которые будем называть
Q-схемами. Системы массового обслуживания представляют собой класс математических схем, разработанных в теории массового обслуживания и различных приложениях для формализации процессов функционирования систем.
Основные соотношения. В качестве процесса обслуживания могут быть представлены различные по своей физической природе процессы функционирования экономических, производственных, технических и других систем, например потоки поставок продукции некоторому предприятию, потоки деталей и комплектующих изделий на сборочном конвейере цеха, заявки на обработку информации ЭВМ от удаленных терминалов и т. д. При этом характерным для работы таких объектов является случайное появление заявок (требований) на обслуживание и завершение обслуживания в случайные моменты времени, т. е. стохастический характер процесса их функционирования. Остановимся на основных понятиях массового обслуживания, необходимых для использования Q-схем, как при аналитическом, так и при имитационном.
В любом элементарном акте обслуживания можно выделить две основные составляющие: ожидание обслуживания заявкой и собственно обслуживание заявки. Это можно изобразить в виде некоторого йго прибора обслуживания Ш (рис. 1), состоящего из накопителя заявок Hi в котором может одновременно находиться
li =0, LiH заявок, где LiH — емкость i-го накопителя, и канала обслуживания заявок (или просто канала) Ki На каждый элемент прибора обслуживания Пi поступают потоки событий: в накопитель Hi — поток заявок wi на канал Кi — поток обслуживании иi.
Потоком событий называется последовательность событий, происходящих одно за другим в какие-то случайные моменты времени. Различают потоки однородных и неоднородных событий. Поток событий называется однородным, если он характеризуется только моментами поступления этих событий (вызывающими моментами) и задается последовательностью {tn} = {0≤ t1 ≤ t2…≤ tn≤ …}, где tn — момент наступления n-го события — неотрицательное вещественное число. Однородный поток событий также может быть задан в виде последовательности промежутков времени между n-м и (п— 1)-м событиями {τn}, которая однозначно связана с последовательностью вызывающих моментов { tn }, где τn= tn - tn - tn-1, n≥1, t0 = 0. т. е. τn = t1
 | |||
 |
Рис. 1. Прибор обслуживания заявок
Потоком неоднородных событий называется последовательность {tn, fn), где U, — вызывающие моменты; tn — набор признаков события. Например, применительно к процессу обслуживания для неоднородного потока заявок могут быть заданы принадлежность к тому или иному источнику заявок, наличие приоритета, возможность обслуживания тем или иным типом канала и т. п.
Рассмотрим поток, в котором события разделены интервалами временя τ1, τ2,.... которые вообще являются случайными величинами. Пусть интервалы τ1, τ2,... независимы между собой. Тогда поток событий называется потоком с ограниченным последействием.
Пример потока событий приведен на рис. 2, где обозначено Тj — интервал между событиями (случайная величина); Тн — время наблюдения, Тс — момент совершения события.
Интенсивность потока можно рассчитать экспериментально по формуле
 | ||
 |
Рис.2. Графическое изображение N-схемы

где N — число событий, происшедших за время наблюдения Тn Если Tj = const илиопределено какой-либо формулой Tj = f (Tj - 1) то поток называется детерминированным. Иначе поток называется случайным.
Случайные потоки бывают:
— ординарными, когда вероятность одновременного появления 2-х н более событий равна нулю;
— стационарными, когда частота появления событий постоянная;
— без последействия, когда вероятность не зависит от момента совершения предыдущих событий.
Поток событий называется ординарным, если вероятность того, что на малый интервал времени ∆t, примыкающий к моменту времени t, попадает больше одного события Р>1 (t, ∆t), пренебрежительно мала по сравнению с вероятностью того, что на этот же интервал времени ∆t попадает ровно одно событие Р1 (t, ∆t) т. е. P1 (t, ∆t )»-P>1 (t, ∆t). Вели для любого интервала ∆t событие

как сумма вероятностей событий, образующая полную группу н несовместных, то для ординарного потока событий

где 0 (∆t)— величина, порядок малости которой выше, чем ∆t т. е.

Стационарным потоком событий называется погож, для которого вер оятно сть появления того или иного числа событий на интервале времени т зависит лишь от длины этого участка и не зависит от того, где на оси времени Ot взят этот участок.
Рассмотрим на оси времени Оt ординарный поток событий и найдем среднее число событий, наступающих на интервале времени ∆t, примыкающем к моменту временя t. Получим

Тогда среднее число событий, наступающих научастке времени ∆t в единицу времени, составит [ Р1 (t,∆t)]/∆t Рассмотрим предел этого выражения при ∆t→0. Если этот предел существует, то она называется интенсивностью (плотностью) ординарного потока событий

Интенсивность потока может быть любой неотрицательной функцией времени, имеющей размерность, обратную размерности времени. Для стационарного потока его интенсивность не зависит от времени и представляет собой постоянное значение, равное среднему числу событий, наступающих в единицу времени λ(t)=λ=const.
Возможные приложения. Обычно в приложениях при моделировании различных систем применительно к элементарному каналу обслуживания Ж» можно считать, что поток заявок wiεW, т. е. интервалы времени между моментами появления заявок (вызывающие моменты) на входе Ki образует подмножество неуправляемых переменных, а поток обслуживания uiεU т. е. интервалы времени между началом и окончанием обслуживания заявки, образует подмножество управляемых переменных.
Заявки, обслуженные каналом Кь и заявки, покинувшие прибор Пi по различным причинам необслуженными (например, из-за переполнения накопителя Нi), образуют выходной поток yi ε Y, т. е. интервалы времени между моментами выхода заявок образуют подмножество выходных переменных.
Процесс функционирования прибора обслуживания Пi можно представить как процесс изменения состояний его элементов во времени z, (t). Переход в новое состояние для Пi означает изменение количества заявок, которые в нем находятся (в канале Кi и в накопителе Hi. Таким образом, вектор состояний для Пi имеет вид zi=(ziH, ziK), где ztH — состояние накопителя НI (zI B=0 — накопитель пуст, zB=l — в накопителе имеется одна заявка,..., ziH—Li H — накопитель полностью заполнен); Li H — емкость накопителя Нi измеряемая числом заявок, которые в нем могут поместиться; ziK— состояние канала Ki( ziK =0 — канал свободен, ziK =l—канал занят и т. д.).
В практике моделирования систем, имеющих более сложные структурные связи и алгоритмы поведения, для формализации используются не отдельные приборы обслуживания, а Q-схемы, образуемые композицией многих элементарных приборов обслуживания Пi (сети массового обслуживания). Если каналы Ki различных приборов обслуживания соединены параллельно, то имеет место многоканальное обслуживание (многоканальная Q-схема), а если приборы П i и их параллельные композиции соединены последовательно, то имеет место многофазное обслуживание (многофазная Q-схема). Таким образом, для задания Q-схемы необходимо использовать оператор сопряжения R, отражающий взаимосвязь элементов структуры (каналов и накопителей) между собой.
Связи между элементами Q-схемы изображают в виде стрелок (линий потока, отражающих направление движения заявок). Различают разомкнутые и замкнутые Q-схемы. В разомкнутой Q-схеме выходной поток обслуженных заявок не может снова поступить на какой-либо элемент, т. е. обратная связь отсутствует, а в замкнутых Q-схемах имеются обратные связи, по которым заявки двигаются в направлении, обратном движению вход-выход.
Собственными (внутренними) параметрами Q-схемы будут являться количество фаз Lф, количество каналов в каждой фазе LKJ, j=l, LФ, количество накопителей каждой фазы LНк, к=l, Lф емкость i-го накопителя LIH. Следует отметить, что в теории массового обслуживания в зависимости от емкости накопителя применяют следующую терминологию для систем массового обслуживания: системы с потерями (LIH =0, т. е. накопитель в приборе Пi отсутствует, а имеется только канал обслуживания Кi), системы с ожиданием (LIH → ∞, т. е. накопитель Hi имеет бесконечную емкость и очередь заявок не ограничивается) и системы смешанного типа (с ограниченной емкостью накопителя Hi). Всю совокупность собственных параметров Q-схемы обозначим как подмножество H.
Для задания Q-схемы также необходимо описать алгоритмы ее функционирования, которые определяют набор правил поведения заявок в системе в различных неоднозначных ситуациях. В зависимости от места возникновения таких ситуаций различают алгоритмы (дисциплины) ожидания заявок в накопителе Нi и обслуживания заявок каналом Ki каждого элементарного обслуживающего прибора Пi Q-схемы. Неоднородность заявок, отражающая процесс в той или иной реальной системе, учитывается с помощью введения классов приоритетов.
В зависимости от динамики приоритетов в Q-схемах различают статические и динамические приоритеты. Статические приоритеты назначаются заранее и не зависят от состояний Q-схемы т. е. они являются фиксированными в пределах решения конкретной задачи моделирования. Динамические приоритеты возникают при моделировании в зависимости от возникающих ситуаций. Исходя из правил выбора заявок из накопителя Нi на обслуживание каналом Ki можно выделить относительные и абсолютные приоритеты. Относительный приоритет означает, что заявка с более высоким приоритетом, поступившая в накопитель Hi ожидает окончания обслуживания предшествующей заявки каналом Ki и только после этого занимает канал. Абсолютный приоритет означает, что заявка с более высоким приоритетом, поступившая в накопитель Hi прерывает обслуживание каналом Ki заявки с более низким приоритетом и сама занимает канал (при этом вытесненная из Ki заявка может либо покинуть систему, либо может быть снова записана на какое-то место в Hi).
При рассмотрении алгоритмов функционирования приборов обслуживания П i, (каналов Ki и накопителей Hi необходимо также задать набор правил, по которым заявки покидают Hi и Ki) для Hi — либо правила переполнения, по которым заявки в зависимости от заполнения Hi покидают систему, либо правила ухода, связанные с истечением времени ожидания заявки в Hi для Kt — правила выбора маршрутов или направлений ухода. Кроме того, для заявок необходимо задать правила, по которым они остаются в канале Ki или не допускаются до обслуживания каналом Кi т. е. правила блокировок канала. При этом различают блокировки Ki по выходу и по входу. Такие блокировки отражают наличие управляющих связей в Q-схеме, регулирующих поток заявок в зависимости от состояний Q-схемы. Весь набор возможных алгоритмов поведения заявок в Q-схеме можно представить в виде некоторого оператора алгоритмов поведения заявок А.
Таким образом, Q-схема, описывающая процесс функционирования системы массового обслуживания любой сложности, однозначно задается в виде
Q=(W, U, H, Z, R, А)
При ряде упрощающих предположений относительно подмножеств входящих потоков W и потоков обслуживания U (выполнение условий стационарности, ординарности и ограниченного последействия) оператора сопряжения элементов структуры R (однофазное одноканальное обслуживание в разомкнутой системе), подмножества собственных параметров Н (обслуживание с бесконечной емкостью накопителя), оператора алгоритмов обслуживания заявок А (бесприоритетное обслуживание без прерываний и блокировок) для оценки вероятностно-временных характеристик можно использовать аналитический аппарат, разработанный в теории массового обслуживания. При принятых предположениях в обозначениях Д. Кендалла будет иметь место классическая система обслуживания типа М/М/1 (одноканальная система с марковским входящим потоком заявок и марковским потоком обслуживания). Рассмотрим на примере основные аналитические соотношения для такой элементарной Q-схемы.
Пример 1. Допустим, что процесс обслуживания начинается при отсутствии заявок в накопителе. Тогда состояния системы массового обслуживания описываются следующей системой уравнений:


где Рn (t) — вероятность нахождения системы в состоянии zn (t)εZ в момент времени t, т. е. когда в ней имеется n заявок.
Эти уравнения следуют из того, что вероятность нахождения в системе n заявок в момент времени (t+∆t)равна вероятности нахождения в системе n заявок в момент t, умноженной на вероятность того, что за время ∆t в систему не поступит ни одной Заявки и ни одна заявка не будет обслужена, плюс вероятность нахождения в системе (n - 1) заявок в момент t,умноженная на вероятность того, что за время ∆t поступит одна заявка и ни одна заявка не будет обслужена, плюс вероятность нахождения в системе (n +1) заявок в момент t, умноженная на вероятность того, что за время ∆t одна заявка покинет систему и не поступит ни одной заявки. Вероятность того, что за время ∆t не поступит ни одной заявки и ни одна заявка не покинет систему, равна (1—λ∆t) (1-μ∆t). Член, содержащий (∆t)2, при составлении дифференциального уравнения опускается. Следовательно, можно записать 1 -(λ+μ)∆t. Относительно остальных двух членов первого уравнения заметим, что

Перенеся Pn (t) влево и устремив ∆t к нулю, получив систему дифференциальных уравнений

Найдем выражение для математического ожидания числа заявок, находящихся в накопителе, и среднего времени ожидания заявок в накопителе для стационарного состояния р=λ/μ<1. прировняв к нулю производные по времени и исключив, таким образом, время t из уравнений, получим систему алгебраических уравнений

Пусть в первом уравнении n=1. Тогда (1+ρ)Р1=Р2+ρР0. Поставив сюда значение Р1 из второго уравнения, находим Р2=ρ2Р0. Повторяя эти операции, получаем Рn=ρ2P0, причем  , так как эта сумма вероятностей того, что в системе нет ни одной заявки, имеется одна заявка, две заявки и т.д. Сумма этих вероятностей должна быть равна единице, так как рассматриваются все возможные состояния системы. Поэтому
, так как эта сумма вероятностей того, что в системе нет ни одной заявки, имеется одна заявка, две заявки и т.д. Сумма этих вероятностей должна быть равна единице, так как рассматриваются все возможные состояния системы. Поэтому  , или
, или
 , откуда Р0=1-ρ. Следовательно, Рn=ρn(1-ρ).
, откуда Р0=1-ρ. Следовательно, Рn=ρn(1-ρ).
Полученное выражение представляет собой геометрическое распределение.
Математическое ожидание числа заявок, находящиеся в системе (приборе),

Отметим, что ln – средне значение и возможны колебания числа заявок, ожидающих обслуживания, что можно оценить с помощью дисперсии:

При этом

Следовательно,

Математическое ожидание числа заявок, находящихся в накопителе,

Среднее время ожидания заявок в накопителе

Возможности оценки характеристик с использованием аналитических моделей теории массового обслуживания являются весьма ограниченными по сравнению с требованиями практики исследования и проектирования систем, формализуемых в виде Q-схем. Несравненно большими возможностями обладают имитационные модели, позволяющие исследовать Q-схему, задаваемую Q=‹W,U,H,Z,Y,R,A›, без ограничений. На работу с Q-схемами при машинной реализации моделей ориентированы многие языки имитационного моделирования, например SIMULA, SIMSCRIPT, GPSS и др.
6.5. КОМБИНИРОВАННЫЕ МОДЕЛИ (А-СХЕМЫ)
Наиболее известным общим подходом к формальному описанию
процессов функционирования систем является подход, предложенный
Н. П. Бусленко. Этот подход позволяет описывать поведение непрерывных и дискретных, детерминированных и стохастических систем, т. е. по сравнению с рассмотренными является обобщенным (универсальным) и базируется на понятии агрегативной системы (от англ. aggregate system), представляющей собой формальную схему общего вида, которую будем называть А-схемой.
Date: 2016-07-18; view: 1282; Нарушение авторских прав