Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Синтез алгоритма управления на примере системы третьего порядка.
|
|
Рассмотрим синтез алгоритма управления на примере системы третьего порядка. Обобщение алгоритма на системы более высокого порядка не представляет сложности.
Пусть дифференциальное уравнение объекта имеет вид
 (116)
(116)
где  - скаляр - выходная переменная; U-управление.
- скаляр - выходная переменная; U-управление.
На вход системы поступает сигнал  ,который должен воспроизводиться переменной . Поставим задачу формирования управления
,который должен воспроизводиться переменной . Поставим задачу формирования управления

минимизирующего ошибку системы.
Введем интервал квантования T и будем стремиться к тому, чтобы в моменты времени t=kT,k=0,1,… выходной сигнал и его первая производная совпадали с входным сигналом и его первой производной. При этом управление строится отдельно на каждом временном отрезке  . Пусть при t=kT известны величины x[kT],f[kT]. Предположим далее, что можно измерить или вычислить производную
. Пусть при t=kT известны величины x[kT],f[kT]. Предположим далее, что можно измерить или вычислить производную  , а также, что в момент t=kT возможно экстраполировать функцию f(t) и оценить ее значение и значение ее первой производной при
, а также, что в момент t=kT возможно экстраполировать функцию f(t) и оценить ее значение и значение ее первой производной при  . Обозначим эти оценки
. Обозначим эти оценки  и
и  . Поставим задачу определения управления U(t) на отрезке , переводящего изображающую точку на плоскости
. Поставим задачу определения управления U(t) на отрезке , переводящего изображающую точку на плоскости  из начального положения
из начального положения  , в конечное положение (
, в конечное положение ( ,
,  ).
).
Задачу определения управления будем решать как обратную задачу динамики, т.е. задавшись траекторией на плоскости соединяющей имеющуюся начальную и желаемую конечную точки, найдем управление U при . Зададимся следующим законом изменения координаты x(t):
 , (117)
, (117)
где время t отсчитывается заново для каждого отрезка. Коэффициенты  постоянны на каждом временном отрезке и изменяются при его смене.
постоянны на каждом временном отрезке и изменяются при его смене.
Определим коэффициенты , исходя из начальных величин  и желаемых конечных величин , . Найдем производную
и желаемых конечных величин , . Найдем производную  согласно формуле (117):
согласно формуле (117):
 . (118)
. (118)
Тогда система уравнений для определения коэффициентов примет вид
 (119)
(119)
Система (119) всегда имеет единственное решение
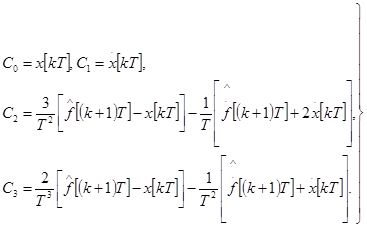 (120)
(120)
Найдем высшие производные по t выражения (117):
 . (121)
. (121)
Подставляя выражения (117),(118),(121) с коэффициентами (120) в уравнение объекта (116), найдем
 .
.
Здесь управление выражается в явном виде, так как уравнение (116) не содержит производных u(t).
Данный алгоритм может быть реализован при использовании ЭВМ в контуре управления. При этом U(t) может реализовываться либо с помощью аналогового устройства с переменными коэффициентами, либо с помощью цифрового вычислительного устройства, работающего с периодом дискретности  , значительно меньшим Т. Оценки , в простейшем случае могут получаться с помощью конечных разностей решетчатой функции
, значительно меньшим Т. Оценки , в простейшем случае могут получаться с помощью конечных разностей решетчатой функции  . Следует отметить, что даже при идеальной экстраполяции система будет следить за входным сигналом с ошибкой. Это объясняется тем, что в системе третьего порядка для однозначного задания движения необходимо знать еще и начальную величину ускорения
. Следует отметить, что даже при идеальной экстраполяции система будет следить за входным сигналом с ошибкой. Это объясняется тем, что в системе третьего порядка для однозначного задания движения необходимо знать еще и начальную величину ускорения  . Здесь же контролируются только координата и ее первая производная. Процесс (117) возможен при условии
. Здесь же контролируются только координата и ее первая производная. Процесс (117) возможен при условии
 .
.
В противном случае реальный процесс x(t) отличается от определяемого по формуле (117) и в точку (, ) система попадет с некоторой сшибкой, к которой еще добавится ошибка экстраполяции. Однако приведенный алгоритм не накапливает ошибки, более того, возникшую на каком-либо этапе ошибку он постарается исправить на следующем шаге. При необходимости можно включить в число контролируемых параметров и вторую производную .
Date: 2016-07-18; view: 350; Нарушение авторских прав