Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Оценивание состояния линеаризованной системы с модальным регулятором при внешних неопределенных ограниченных возмущениях
|
|
Пусть в начальный момент времени t0 состояние системы является неопределенным, известно, что оно принадлежит эллипсоиду, где Q0∈ G+ – заданная положительно определенная симметрическая матрица. Предполагается, что пара (A,D) –управляема, а матрица C является матрицей полного ранга строк.
Требуется на заданном интервале времени получить эллипсоидальную оценку множества состояний для процессов системы, начинающихся из заданного эллипсоида при E (Q0) и неопределенных возмущениях, а также установить ограниченность решений исходной системы на конечном интервале относительно заданных множеств.
Инвариантные эллипсоиды характеризуют внешнюю оценку области достижимости в текущий момент времени t при влиянии неопределенных внешних возмущений w(t) на траектории системы. В этой связи нас будет интересовать минимальные (в некотором смысле) инвариантные эллипсоиды, содержащие траектории или выход z(t) рассматриваемой системы.
%-----модель математического маятника -------
% Примеры синтеза оценивания состояния и моделирования
%--Исходные данные --Линеаризованная модель с неопределенными возмущениями
% вектор состояния x=(x1,x2)T
clc;
n=2;
m=1;
l=0.5;
Ip=0.05;
g=9.8;
mlp=m*l*l+Ip;
mgl=m*l*g;
Ri = 2.6;
kg =3.7;
KM=0.00767*100;
bet=kg*KM;
btet=0.025;
tet0=5*pi/9;
cs0=cos(tet0);
V0=mgl*sin(tet0)*Ri/bet;
n1=n;
betR=bet/Ri;
btetbR=btet+bet*betR;
A = [0 1; -mgl*cs0/mlp -btetbR/mlp];
B1 = [0; bet/Ri/mlp];
D=[0; -1/mlp]/20;
C=[1 0;0 1;0 0];
Cy=[1 0];
B2=[0; 0;1];
n1=n;
mu1=1;
eig(A)
p=[0. -11];
K0=-place(A,B1,p);
ABK0=A+B1*K0;
% Нахождение предельного инвариантного эллипсоида замкнутой системы с
% матрицей A+B*K0 и оптимизацией по параметру q;
A0=ABK0;
min_tr_Q=1e+4;
for q = 0.1:0.002:1;% 0.944:0.002:0.944
cvx_begin sdp
variable Qs(n, n) symmetric;
minimize(trace(Qs))
subject to
Qs >= eye(2)*10e-5;
[A0*Qs + Qs*A0'+q*Qs D;
D' -q*eye(1)]< 0; %условие асимптотич устойчивости
cvx_end
Qsf = double(Qs)
trQ=trace(Qsf);
if min_tr_Q > trQ
min_tr_Q = trQ;
Q_min = Qsf;
q_min = q
end;
end;
Q0 = Q_min;
q0=q_min;
С помощью данной программы в пакете Matlab матрица минимального инвариантного эллипсоида

При q0=q_min=1.
Построим оценку состояния линеаризованной системы с неопределенными ограниченными возмущениями. Для численного интегрирования МСС на заданном интервале [t0,tk] использовалась стандартная функция пакета Matlab ode15s, вызов которой показан в следующем фрагменте программы.
%Эллипсоид
% Оценивание состояния маятника с неопределенными возмущениями с помощью
% матричной системы сравнения
t0=0; tk=10;
Q=[1 0; 0 1];
vec_Q = [Q(:,1); Q(:,2)];
[t,H] =ode15s(@(t,vec_Q) Prav_Lin_Mayat_1(t,vec_Q,A0,D,q0),[t0 tk],vec_Q);
MQ = [];
nh=length(H(:,1));
t(nh)
nn=1;%round(nh/20);
figure(1)
for i = 1:nn:nh
MQ = [H(i,1) H(i,2); H(i,3) H(i,4)];
MQ=(MQ+MQ')/2;
krug(MQ,0,'g');
hold on;
end;
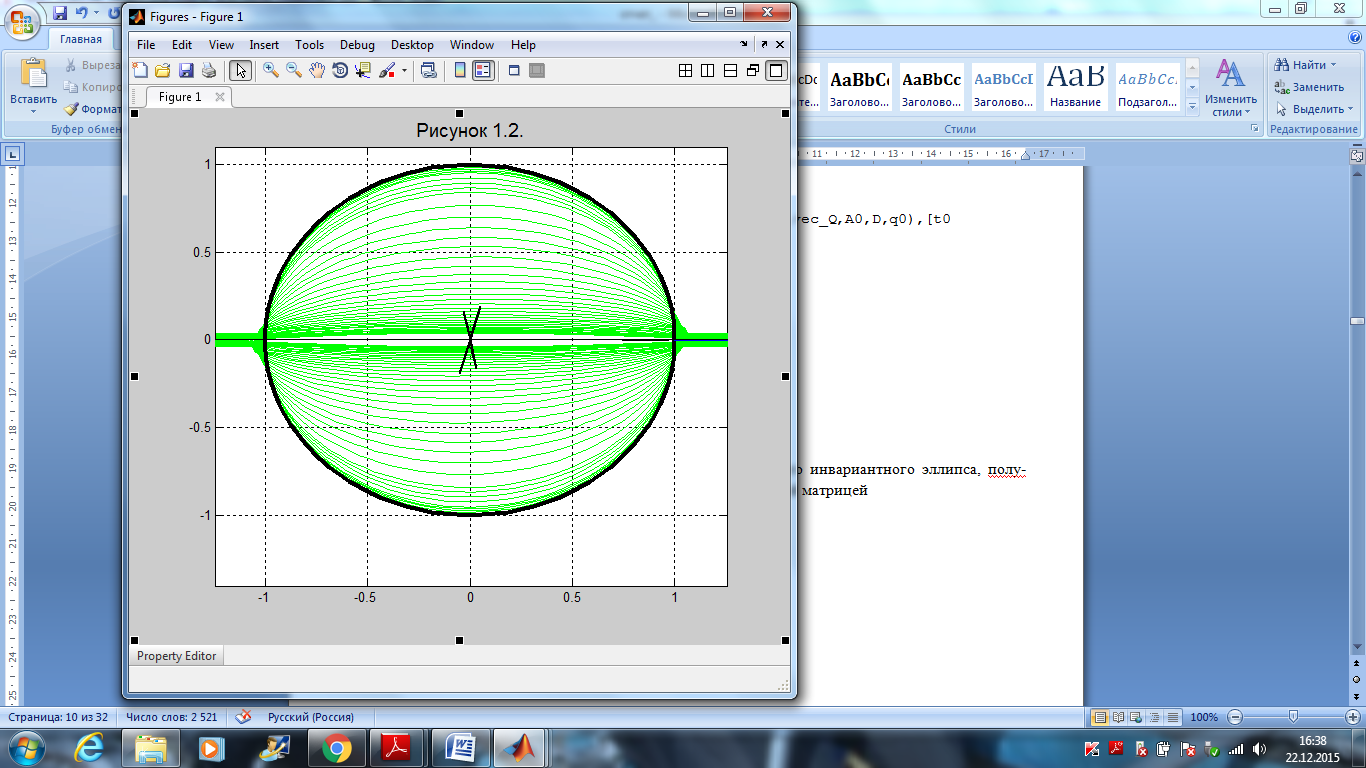
krug(Q0,0,'k');
krug(Q,0,'k--');
На рисунке 1.2 показаны сечения эволюционирующего инвариантного эллипса, полученные на основе численного решения МСС с начальной матрицей Q=[1 0; 0 1];
Date: 2016-01-20; view: 436; Нарушение авторских прав