Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Існують такі типи топології локальних мереж: зірка, кі- льце, шина, дерево, комбінована. 4 page
|
|
Метою автоматичного керування є підтримка заданих зна- чень керованих (регульованих) величин при повній автоматиза- ції. Ця мета досягається за допомогою об'єднаних у систему ав- томатичних пристроїв, працюючих без втручання людини. Вони розв'язують більш прості завдання ніж автоматизовані системи, однак з більшою швидкодією і точністю. Ці системи звичайно входять, як складова частина, в автоматизовані системи керу- вання, звільняючи людину від рутинної роботи і дають їй час для прийняття відповідальних рішень.
Так, наприклад, у сучасних автомобілях багато операцій, що виконувались раніше людиною, передаються автоматам. Це, наприклад, підтримка заданої температури та вологості повітря в салоні автомобіля, автоматичне перемикання швидкості, вибір і підтримка оптимальної швидкості руху автомобіля.
6.5  Системи автоматичного керування
Системи автоматичного керування
6.5.1  Поняття про систему автоматичного керування
Поняття про систему автоматичного керування
 Системами автоматичного керування (САК) назива- ються системи керування, що вирішують завдання керування без участі людини.
Системами автоматичного керування (САК) назива- ються системи керування, що вирішують завдання керування без участі людини.
Головними перевагами автоматичних систем керування є їх висока швидкодія, надійність і добра якість керування.
Зазначені вище переваги привели до того, що системи ав- томатичного керування є на сьогодні найбільш поширеним кла- сом систем керування. Вони є практично на будь-якому вироб- ництві, в наукових лабораторіях, космічних літальних апаратах, автомобілях, побутовій техніці.
Недоліком систем автоматичного керування є те, що вони здатні ефективно вирішувати тільки відносно прості задачі, в яких чітко визначена мета керування і формалізований алго- ритм розв'язання. Уразі розмитості мети і непередбачуваності поведінки об'єкта керування основним елементом системи ке- рування є людина.
Системи автоматичного керування в залежності від ха- рактеру і вигляду операцій, що реалізовуються ними, поділя- ються на ряд класів, таких, як системи автоматичного регулю- вання, контролю, стеження, адаптивного керування.
6.5.2  Системи автоматичного регулювання
Системи автоматичного регулювання
 Системи автоматичного регулювання (CAP) називають системи, що вирішують завдання підтримки в заданих межах параметрів об'єкта керування.
Системи автоматичного регулювання (CAP) називають системи, що вирішують завдання підтримки в заданих межах параметрів об'єкта керування.
При цьому регульована величина в процесі керування може залишатися в заданих межах або змінюватися відповідно до програми.
У першому випадку системи автоматичного керування називаються стабілізаторами, а у другому — системами про- грамного керування.
Наприклад, завданням стабілізації буде завдання підтри- мки в заданих межах температури і вологості в салоні автомо- біля, а завданням програмного керування - рух літака за допо- могою автопілота.
Іншим прикладом стабілізації, що є класичним, є стабілі- зація кількості обертів двигуна за допомогою відцентрового регулятора Уатта.
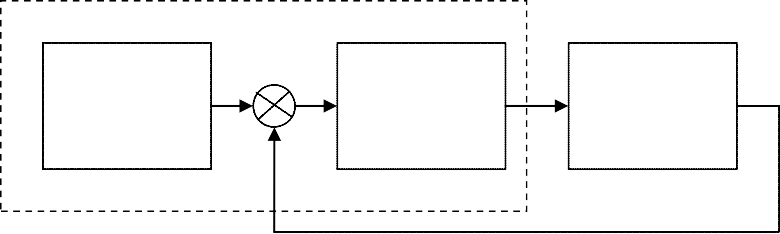
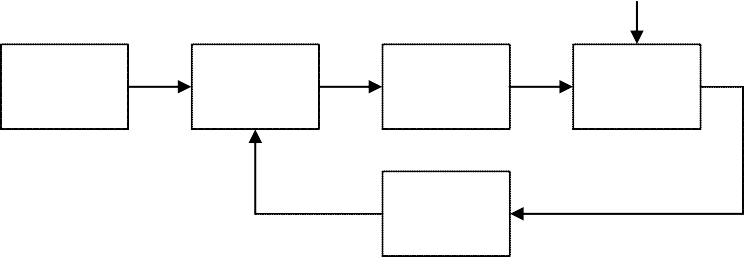
Система автоматичного регулювання в загальному ви- гляді містить об'єкт регулювання і регулюючу систему, в яку входять задавальний пристрій (задатчик), елемент порівняння і регулюючий пристрій (рис. 6.2).
Робота системи автоматичного регулювання відбувається таким чином. Із задавального пристрою на пристрій порівняння надходить керуючий сигнал х, а із об'єкта керування по ланцю-
 гу зворотнього зв'язку — сигнал у, що характеризує реальний стан параметрів об'єкта, протилежний за знаком сигналу х. Внаслідок пі цих сигналів на виході пристрою порівняння ви- робляється сигнал х = х - у. Зворотний зв'язок, який розгляда- ється, має назву негативного.
гу зворотнього зв'язку — сигнал у, що характеризує реальний стан параметрів об'єкта, протилежний за знаком сигналу х. Внаслідок пі цих сигналів на виході пристрою порівняння ви- робляється сигнал х = х - у. Зворотний зв'язок, який розгляда- ється, має назву негативного.
Регулююча система
Задавач
х Δх
 у
у
Регулюючий пристрій
Об’єкт керування
Негативний зворотний зв'язок
Рисунок 6.2 – Система автоматичного регулювання
 Якщо сигнал зворотного зв'язку у є відносно сигналу х по- зитивним, то він посилює дію сигналу х, приєднуючись до ньо- го. У цьому разі х = х + у. Такий зв'язок називається позитив- ним. У задачах керування він використовується рідко. Негатив- ний зворотний зв'язок корегує фактичне значення регулюємого параметра так: якщо сигнал у зменшується, то х збільшується, а якщо у збільшується, то х зменшується, що, в свою чергу, призводить до збільшення чи зменшення у. В результаті будь- яке відхилення у на виході об'єкта керування від величини х = х0, що виробляється задавальним пристроєм, або функції х=x(t), що змінюється за часом, буде зменшуватися. Це зменшення до- сягається за допомогою регулюючого пристрою, який перетво- рює величину х відповідно до деякої заданої функції F.
Якщо сигнал зворотного зв'язку у є відносно сигналу х по- зитивним, то він посилює дію сигналу х, приєднуючись до ньо- го. У цьому разі х = х + у. Такий зв'язок називається позитив- ним. У задачах керування він використовується рідко. Негатив- ний зворотний зв'язок корегує фактичне значення регулюємого параметра так: якщо сигнал у зменшується, то х збільшується, а якщо у збільшується, то х зменшується, що, в свою чергу, призводить до збільшення чи зменшення у. В результаті будь- яке відхилення у на виході об'єкта керування від величини х = х0, що виробляється задавальним пристроєм, або функції х=x(t), що змінюється за часом, буде зменшуватися. Це зменшення до- сягається за допомогою регулюючого пристрою, який перетво- рює величину х відповідно до деякої заданої функції F.
Вихідний сигнал з регулюючого пристрою, підсилений до необхідного значення, подається на виконавчий орган, який прямо або через регулюючий орган впливає на об'єкт регулю- вання. У результаті усувається розходження між регульованою величиною і заданим значенням сигналу, що надходить із зада- вача.
6.5.3  Системи автоматичного контролю
Системи автоматичного контролю
 Системи автоматичного контролю (САК) вирішують завдання автоматичного контролю параметрів об'єкта керуван- ня, необхідних керуючій системі для керування цим об'єктом.
Системи автоматичного контролю (САК) вирішують завдання автоматичного контролю параметрів об'єкта керуван- ня, необхідних керуючій системі для керування цим об'єктом.
Тому в тому або іншому вигляді системи автоматичного контролю наявні у будь-якій системі керування. Вони, як прави- ло, не втручаються в технологічний процес.
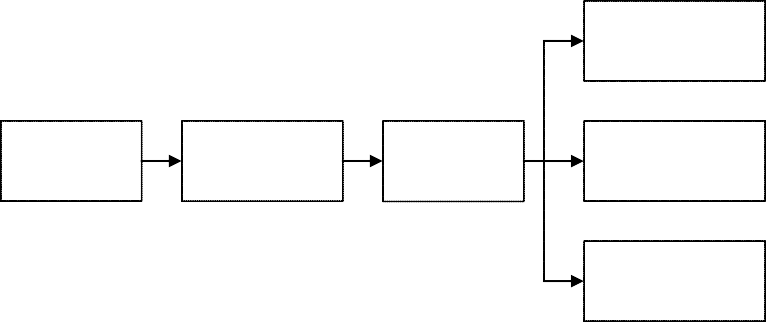
Схематично САК складається з датчиків, підсилювачів, елементів передавання і зв'язку, сигналізуючих пристроїв, ви- мірювальних і реєструючих приладів (рис. 6.3).
Датчик вимірює значення параметра, що контролюється, і перетворює його в сигнал, зручний для підсилення і передаван- ня. Звичайно використовують датчики, що перетворюють нее- лектричні величини в електричні. Отримані сигнали підсилю- ються до необхідної величини, перетворюються за потреби в іншу форму, необхідну для передавання і відображення, і пере- даються через канал зв'язку до кінцевих пристроїв. За останні використупають реєструючі, вимірювальні і сигнальні при- строї.
 Сигналізуючі пристрої
Сигналізуючі пристрої
Датчик
Підсилювач Зв'язок
Реєструючі прилади
Вимірювальні прилади
Рисунок 6.3 – Система автоматичного контролю
6.5.4 Системи стежєення
 Системи стеження відрізняються від систем автома- тичного регулювання тим, що вихідна величина відтворює з певною точністю вхідну, характер зміни якої заздалегідь неві- домий.
Системи стеження відрізняються від систем автома- тичного регулювання тим, що вихідна величина відтворює з певною точністю вхідну, характер зміни якої заздалегідь неві- домий.
Однак система стеження не може впливати на вхідну ве- личину.
Системи стеження використовуються для різних цілей. Як вхідну величину системи стеження можна розглядати абсолют- но різні величини. Одним з найбільш поширених застосувань систем стеження є їх включення в системи керування положен- ням об’єкта. Наприклад, це стеження за літаком або ракетою, що знаходяться в зоні дії радіолокатора. Інший приклад – ручний маніпулятор. Його робота ґрунтується на стеженні за діями рук оператора.
Таким чином, в системі стеження задатчиком є об'єкт із за- здалегідь відомою поведінкою.
6.5.5  Системи адаптивного керування
Системи адаптивного керування
 Адаптивними системами називаються системи автома- тичного керування, у яких автоматично змінюється спосіб фун- кціонування керуючої частини для здійснення в певному зна- ченні найкращого керування.
Адаптивними системами називаються системи автома- тичного керування, у яких автоматично змінюється спосіб фун- кціонування керуючої частини для здійснення в певному зна- ченні найкращого керування.
Адаптивні системи керування поділяються на ряд класів:
1 Адаптивні системи функціонального регулювання, для яких керуючий вплив є функцією якого-небудь параметра, на- приклад, функції потужності двигуна.
2. Адаптивні системи екстремального регулювання, які за- безпечують підтримку крайнього значення одного або декіль- кох параметрів в об'єкті, наприклад, найбільшої швидкодії.
3. Адаптивні системи оптимального регулювання. Для них виробляється узагальнений критерій оптимальності, відповідно до якого здійснюється зміна регульованих параметрів. Напри-
клад, ставиться завдання обробки деталей з мінімальною вартіс- тю і максимальною продуктивністю.
Адаптивні системи керування здатні в процесі виконання основного завдання керування доповнювати інформацію, якої не вистачає, про об'єкт керування і навколишнє середовище, завдя- ки чому поліпшується якість керування.
Застосування адаптивних систем є найбільш ефективним засобом у керування об'єктів з недостатньо вивченими характе- ристиками, що змінюються за часом, тобто нестаціонарними об'єктами.
Усі відомі адаптивні системи керування поділяються на
параметричні і непараметричні системи.
У перших використовується алгоритм керування з фіксо- ваною структурою, а у других – алгоритм керування заздалегідь не фіксується, а виробляється в процесі розв'язування задачі ке- рування.
Дуже часто в основі роботи адаптивних систем керування використовується стохастична модель, яка працює з випадко- вими величинами і процесами.
Останніми роками в теорії адаптивних систем керування швидко розвивається напрям, що використовує навчальні та іг- рові ситуації. У таких системах відбувається накопичення досві- ду в процесі їх роботи, і з часом вони працюють все більш ефек- тивно.
Багато які адаптивні системи керування використовують у своїй структурі пристрої і програми ідентифікації параметрів об'єкта керування. Необхідність ідентифікації виникає у випад- ку, коли апріорні оцінки об'єкта керування дуже грубі і коли за- здалегідь відомо, що параметри об'єкта керування в процесі йо- го роботи змінюються непередбачувано в широких межах.
6.5.6 Лінійні та нелінійні системи керування
 Системи автоматичного регулювання, що використовують лінійні закони регулювання, в яких динамічні параметри зали- шаються незмінними протягом всього часу регулювання, нази- ваються лінійними системами.
Системи автоматичного регулювання, що використовують лінійні закони регулювання, в яких динамічні параметри зали- шаються незмінними протягом всього часу регулювання, нази- ваються лінійними системами.
 За допомогою таких систем керування не завжди вдається ефективно вирішувати завдання керування і насамперед пов'я- зані з автоматизацією нестаціонарних технологічних процесів.
За допомогою таких систем керування не завжди вдається ефективно вирішувати завдання керування і насамперед пов'я- зані з автоматизацією нестаціонарних технологічних процесів.
Системи автоматичного керування, в яких параметри ди- намічної настройки, алгоритми функціонування, а також струк- тура змінюються стрибкоподібно згідно з вибраним логічним законом в залежності від стану параметрів, що контролюються, називаються нелінійними системами керування.
У схемотехнічному відношенні названі системи являють собою нелінійні пристрої, що містять ключові логічні елемен- ти, які відповідно до певного алгоритму розривають або відно- влюють зв'язки між функціональними пристроями системи. Крайнім випадком таких систем керування є чисто логічні ре- лейні, або позиційні системи.
З точки зору керування принцип змінності структури і алгоритму функціонування системи керування означає те, що регулюючий вплив стрибкоподібно змінюється в той або ін- ший бік, набуваючи при цьому кінцевого значення в певному інтервалі часу.
У нелінійних системах керування поєднуються позитивні властивості як лінійних, так і релейних систем керування. За до- помогою таких систем керування вдається керувати технологіч- ними процесами при таких збуреннях, які недопустимі у разі ви- користання лінійних систем керування. Крім того, в нелінійних системах керування значно підвищується стійкість, завдяки чо- му є можливість автоматизувати структурно нестійкі об'єкти. До нелінійних систем керування не ставляться високі вимоги щодо стабільності і точності налагоджень динамічних параметрів, що
дозволяє значно спростити схемотехніку і надійність систем за- галом.
Одним із широко розповсюджених способів реалізації нелінійних алгоритмів керування є спільне застосування регу- люючих пристроїв з типовими лінійними, ПІ, ПД і ПІД законами регулювання і ряду блоків, які реалізують логічні операції.
Як правило, ця апаратура вимагає широкого використання засобів керуючої обчислювальної та мікропроцесорної техніки і складного програмного забезпечення.
6.4  Цифрові системи керування
Цифрові системи керування
 Системи керування, в яких сигнали існують у вигляді циф- рових кодів, називаються цифровими системами керування.
Системи керування, в яких сигнали існують у вигляді циф- рових кодів, називаються цифровими системами керування.
Як правило, у цифрових системах керування керуючим за- собом є або керуючий пристрій, або спеціалізована електронна цифрова обчислювальна машина (ЕЦОМ).
Якщо цифрова система керування працює в прискореному масштабі часу, тобто працює з тією самою швидкістю, що і швидкодіючий об'єкт керування, то така система керування на- зивається цифровою системою керування в реальному масштабі часу.
Цифрові системи керування в реальному масштабі часу побудовані на основі засобів обчислювальної техніки та при- строїв зв'язку з об'єктом і прискорено реалізують збирання та оброблення інформації. Основу цих систем складають обчис- лювальні машини, аналого-цифрові та цифроаналогові перетво- рювачі. При цьому може бути створений ієрархічний комплекс керування за допомогою ряду ЕЦОМ. Для підвищення швидко- дії в керуючі системи вводять спеціалізовані обчислювальні машини типу спецпроцесорів, гібридні обчислювальні системи і на нижньому рівні керування – цифрові регулятори.
За необхідності передавання керуючої інформації на ве- ликі відстані для зменшення завад часто використовують засо- би оптоволоконного зв'язку. У цьому випадку електричні сиг-
нали перетворюються у світлові сигнали, які передаються ка- налами зв'язку без перекручень, а потім знову перетворюються в електричні сигнали.
Важливою частиною цифрових систем керування є про- грамне забезпечення, що складається з пакетів загальних про- грам, які містять операційні засоби, і спеціальні, що містять пакети прикладних і спеціалізованих програм.
Пакети прикладних програм складаються із тестових програм для діагностики апаратури. Додатково до них розроб- люються програми ідентифікації об'єктів керування і програ- ми збирання та оброблення інформації про стан об'єкта керу- вання. До спеціальних програм відносяться програми, необ- хідні для відображення та реєстрації інформації.
У самому загальному вигляді цифрову систему керування можна показати за допомогою рис. 6.4.
 F
F
ПВВ ОП ЦАП ОК
АЦП
Рисунок 6.4 – Цифрова автоматична система керування
Цифрова система автоматичного керування складається з пристрою вводу-виводу (ПВВ), обчислювального пристрою (ОП), цифро-аналогового перетворювача ЦАП, аналого- цифрового перетворювача (АЦП) та об'єкта керування (ОК).
Програма керування через ПВВ записується у пам'ять ОП, який зберігає також необхідну інформацію про ОК. Поточні па- раметри ОК за допомогою АЦП перетворюються у цифрову фо- рму і порівнюються із наведеними у цифровій формі потрібними параметрами. Одержане в результаті порівняння розходження перетворюється за допомогою ЦАП в аналогову форму і у ви-
гляді керуючої у відповідності до того чи іншого закону керу- вання впливає на ОК, приводячи його до потрібного стану.
Цифрові системи керування мають у порівнянні з анало- говими ряд вагомих переваг. Це насамперед висока, недосяжна для аналогових систем керування точність. Потім можливість реалізації дуже складних нелінійних алгоритмів із дистанцій- ним керуванням, висока завадозахищеність і надійність. Однак цифрові системи керування програють аналоговим у швидкодії і в ряді випадків у компактності та вартості. На практиці часто використовують гібридні системи керування, що містять поряд з цифровими аналогові, наприклад, аналогові регулюючі при- строї.
Особливий різновид цифрових керуючих систем склада- ють системи, у яких об'єктом керування є цифровий автомат, наприклад, суматор. Такі об'єкти називаються операційними ав- томатами (ОА), а керуючі ними цифрові пристрої – керуючими автоматами (КА) (рис. 6.5).
Даний різновид систем керування широко використову- ється В обчислювальній техніці та у цифрових пристроях різно- го призначення.
1 Операційний 2 автомат
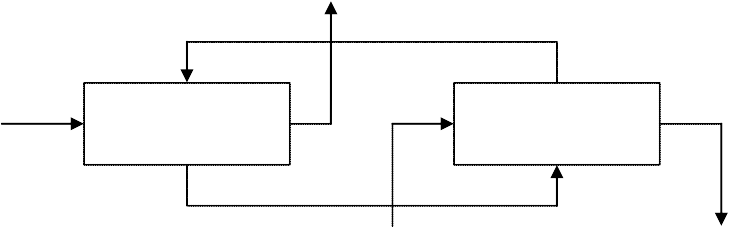 Керуючий автомат
Керуючий автомат
Рисунок 6.5 – Цифрова система з операційним автоматом
Працює така система так. На вхід 1 операційного автомата надходить інформація, яку цей автомат перетворює, а із виходу 2 знімається результат перетворень. По зв'язку 3 на вхід ОА на- дходять керуючі дії, що відповідають алгоритму, який реалізу- ється. По зв'язку 4 на вхід керуючого автомата (КА) надходять ознаки, що характеризують інформацію, яка перетворюється. По
зв'язку 5 надходить сигнал початку операції керування, а по зв'я- зку 6 – сигнал закінчення цієї операції.
Розглянемо як приклад арифметичний пристрій (АП), що складається із ОА, який є суматором, і КА для керування сума- тором.
Працює АП так. По входу 1 в суматор заносяться перша і друга складові, а в блок керування по входу 5 записується код операції складання. Після цього по зв'язку 3 згідно з алгоритмом складання, що міститься у КА, надсилаються керуючі сигнали, наприклад, зсув регістрів, збудження відповідних шин суматора і т.д. По зв'язку 4 із суматора на блок керування надходять озна- ки, необхідні для подальшого керування процесу складання, по- ки із виходу 6 не повернеться сигнал закінчення операції скла- дання.
Наведена на рис. 6.5 структура системи керування цінна іще тим, що вона в узагальненій формі є моделлю роботи будь- яких систем керування. На даний час такі моделі широко розпо- всюджені на практиці. Для цього об'єкт керування моделюється у цифровій формі у вигляді програм і даних до них та заносить- ся у пам'ять ЕЦОМ. Така сама модель утворюється і для керую- чої системи. Потім ці моделі об'єднуються у єдину цифрову сис- тему керування.
6.5  Керуючі автомати
Керуючі автомати
Керуючі автомати – це автомати, що призначені для ке- рування об'єктами виробничого призначення і технологічними процесами у автоматичному режимі роботи.
Вони входять як складова і важлива частина в керуючі си- стеми і забезпечують виконання їх алгоритмів керування. Крім керуючих автоматів, в керуючу систему входять датчики, еле- ктроавтоматика, засоби зв'язку, інформаційна система, виконав- чі та регулюючі органи. Поряд із основною функцією керування керуючі автомати вирішують також завдання забезпечення тако- го режиму системи керування, в якому кожну команду можна здійснити за допомогою органів ручного керування. Керуючі
автомати також здійснюють типові захисти, такі, як захист від самозапуску при зникненні та появі знову живлення від елект- ромережі, захист від перенавантажень, захист при несправнос- тях або неправильних діях оператора, контроль справності при- строю, локалізацію та усунення несправностей, сигналізацію про хід роботи обладнання і в особливих випадках видачу сиг- налів у систему реєстрації та обліку роботи обладнання.
Керуючі автомати, крім шафи керування, звичайно, міс- тять одну або декілька шаф електроавтоматики, які з'єднуються з обладнанням, що обслуговується, кабелями або джгутами проводів. Шафи керування і електроавтоматики виготовляють і монтують, як правило, на спеціальних підприємствах. Після пі- дключення їх до об'єктів керування вони повинні бути повністю готові до роботи.
Керуючі автомати можуть бути електричними, пневмати- чними, гідравлічними, електро- і пневмогідравлічними.
Крім того, вони підрозділяються на системи із логічним (релейним) і аналоговим принципами керування. Останні у своїй роботі поряд із цифровою обробкою використовують й аналогове оброблення інформації. Вони застосовуються у сис- темах керування на підприємствах із неперервним циклом ви- робництва і є, як правило, більш складними, ніж перші.
Логічні керуючі автомати, які часто ще називаються дискретними або цифровими. Наступним етапом у розвитку керуючих автоматів було використання в них від напівпро- відникових до інтегральних елементів. У результаті виникла можливість реалізації в одній мікросхемі повної схеми того чи іншого керуючого автомата. Однак при цьому виникло проти- річчя між економічною доцільністю випуску таких схем вели- кими серіями і, невеликою їх кількістю при вирішенні того чи іншого конкретного практичного завдання керування. Ці су- перечності вдалося вирішити розробленням спеціальних вели- ких інтегральних схем, названих мікропроцесорами, за допо- могою яких пактичні завдання вирішувались програмно.
У результаті були розроблені програмовані керуючі авто- мати. У результаті виникли додаткові можливості їх модерніза-
ції, додання нових функцій. Однак одержання цих переваг спри- чинило зниження швидкодії та частково надійності. Вартість програмованих керуючих автоматів у ряді випадків також була більшою за вартість пристроїв із на інтегральних схемах з малим ступенем інтеграції. Тому, хоча програмовані керуючі автомати потіснили значно автомати із жорсткою логікою, однак у кінце- вому підсумку витіснити їх не змогли.
Таким чином, сучасні керуючі автомати поділяються на два основних класи – із програмованою (гнучкою) та зі схемною (жорсткою) реалізацією алгоритмів керування.
У схемно-реалізованих автоматах команди керування від- працьовуються за допомогою спеціальних схем. У загальному випадку автомати такого типу надто складні у проектуванні і насамперед тому, що вони не мають регулярної структури. На практиці буває простіше побудувати новий пристрій для нової послідовності команд керування, ніж вносити зміни у раніше розроблений автомат.
Крім того, автомати зі схемною реалізацією незручні в експлуатації, тому що кожен з них має у своїй структурі особ- ливості, які необхідно знати при їх експлуатації.
Зазначені недоліки обмежують можливості використання автоматів зі схемною логікою для складних завдань керування.
У той самий час для вирішення більш простих завдань ке- рування вони широко застосовуються через низьку вартість, високу швидкодію та надійність.
Однак існує ще один важливий клас керуючих автоматів, що займає проміжне місце між програмованими автоматами і автоматами із схемною логікою, які використовують мікропро- грамний принцип керування – мікропрограмні керуючі автома- ти. Цей принцип вперше був використаний при побудові ЕОМ для підвищення регулярності їх структури.
В основу мікропрограмних керуючих автоматів покладе- на ідея мікропрограмного керування на рівні мікрооперацій.
Мікропрограмний автомат є програмованим автоматом, в якому на відміну від звичайної або керуючої ЕОМ програму- вання ведеться на самому низькому рівні – машинній мові.
Програмування мікропрограмного пристрою аналогічне до звичайного програмування з тією різницею, що програми пишуться машинною мовою.
Укладач мікропрограм повинен чітко розуміти функції ко- жного блоку універсального мікропрограмного пристрою. Він повинен знати усі вхідні і вихідні сигнали для кожної частини автомата, знати часові характеристики сигналів і схеми, на які він впливає, тому що мікропрограма керує пристроєм на рівні схемної реалізації. Це означає, що розробник мікропрограмного пристрою керування повинен бути одночасно і програмістом, і схемотехіком.
Таким чином, мікропрограмування це є деяка методика з реалізації функцій керування, в основу якої покладене упоряд- коване розроблення керуючих сигналів пристроєм керування за раніше заданою програмою.
Основні переваги мікропрограмного керування – це:
1. Стандартна структура пристрою керування, що вирішує різні завдання керування.
2. Гнучкість пристроїв керування, яка реалізується їх переп- рограмуванням, що зберігає час при розробленні при- строїв керування.
3. Простота процедури діагностики, виявлення та усунення несправностей.
4. Простота проектування, налагодження та експлуатації.
5. Великий термін служби, що забезпечується за рахунок перепрограмування мікропрограмних пристроїв керуван- ня в процесі їх експлуатації.
У той самий час мікропрограмні автомати потребують бі- льше часу для своєї роботи, ніж автомати зі схемною логікою, тому що потрібен додатковий час для послідовного виконання операцій, як це здійснюється в ЕОМ.
Такі системи знайшли широке розповсюдження для розв'я- зання складних виробничих завдань керування. Вони є спеціалі- зованими керуючими ЕОМ, об'єднаними між собою каналами надійного зв'язку і програмовані мовами високого рівня за до- помогою універсальних ЕОМ. Після програмування програма з
універсальної ЕОМ переписується в керуючу і таким чином остання вирішує конкретне завдання керування. Далі керуюча машина вмикається в об'єкт керування і працює за заданою про- грамою. За необхідності керуючу програму модернізують за до- помогою спеціальних пристосувань.
Таким чином, сучасні керуючі автомати можна поділити на автомати зі схемною і гнучкою логікою. Автомати зі схем- ною логікою призначені для вирішення простих завдань керу- вання, а з гнучкою – для більш складних. Ті та інші автомати можуть бути як аналоговими, так і цифровими. Останні на сьо- годні є найбільш поширеними і в поєднанні з мікропроцесорною технікою найбільш ефективними для вирішення складних за- вдань керування.
6.6  Подання роботи керуючих автоматів граф-схемами алго- ритмів
Подання роботи керуючих автоматів граф-схемами алго- ритмів
6.6.1 Поняття про графічні схеми алгоритмів
 Наочне подання роботи керуючого автомата – це зобра- ження її у вигляді орієнтованого графу.
Наочне подання роботи керуючого автомата – це зобра- ження її у вигляді орієнтованого графу.
Графічне подання роботи автомата, у якому кожний з його етапів зображений геометричною фігурою, які з'єднані стрілка- ми, що показують послідовність виконання етапів, за необхід- пості з поясненнями, називається граф-схемою алгоритму (ГСА).
Кожній вершині граф-схеми зіставляється оператор. Для початку і кінця ГСА виділяються спеціальні оператори – поча- ток і кінець. У початковий оператор Ао не входить жодна дуга, а виходить із нього одна. У кінцевий оператор Ак можуть входить одна або декілька дуг, але не виходить жодна дуга.
Оператори, які розміщені між операторами початку і кін- ця, можна поділити на два типи: оператори, за якими форму- ються вихідні керуючі сигнали, і оператори, за якими перевіря- ються логічні умови. Оператори першого типу називаються ке- руючими, а другого – порічними.
Date: 2016-02-19; view: 452; Нарушение авторских прав