Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Основные методы измерений
|
|
По мере накопления опыта использования спутниковых радионавигационных систем были отработаны различные методы определения местоположения (координат) точек земной поверхности (пунктов). Их условная классификация представлена на рис. 21.
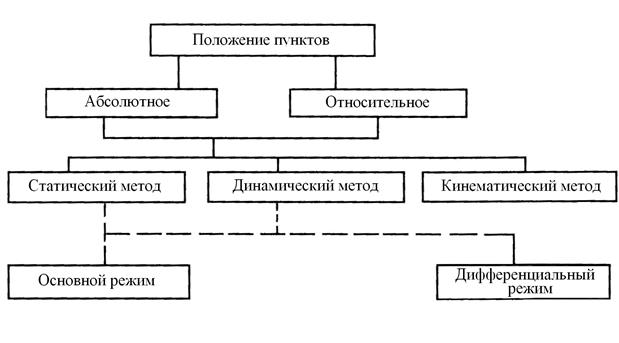
Рис. 21. Классификация методов определения положения пунктов
По отношению к используемым системам координат, положение пунктов можно разделить на два класса: абсолютное, относительное.
При определении абсолютного положения имеется в виду получить координаты пунктов в единой, принятой в спутниковой радионавигационной системе, координатной системе и системе времени.
Наблюдения, выполняемые на одном пункте независимо от измерений на других станциях, называются автономными. Автономные наблюдения очень чувствительны ко всем источникам погрешностей, обеспечивают точность определения координат 15 – 30 м и используются для нахождения приближенных координат в точных измерениях.
Под относительным положением определяемого объекта подразумевается определение положения одного объекта в системе координат другого объекта, принимаемого за исходный.
При определении абсолютного положения пункта статическим методом, приемное устройство устанавливается на этот пункт и в течение достаточно продолжительного интервала времени ведутся соответствующие наблюдения.
Определение относительного положения пунктов в статическом режиме предусматривает установку приемного устройства как минимум на один базовый (исходный) пункт с известными координатами с одновременными наблюдениями на определяемом пункте. При статическом позиционировании, как и при дифференциальных измерениях, приемники работают одновременно на двух станциях – базовой с известными координатами и определяемой. После окончания измерений выполняется совместная обработка информации, собранной двумя приемниками. Точность способа зависит от продолжительности измерений, которая выбирается в соответствии с расстоянием между точками. Современные приемники позволяют достичь точности определения плановых координат (5 – 10 мм) + 1 – 2 мм/км, высотных – в 2 – 3 раза ниже. Если система координат исходного пункта – абсолютная, то в результате наблюдений получают абсолютные координаты определяемого пункта.
Динамический метод предполагает, что приемник, ведущий наблюдения за спутником, установлен на борту транспортного средства, которое находится в движении, при этом имеется независимая от GPS модель движения объекта.
Кинематический метод отличается от динамического отсутствием внешней модели движения определяемого объекта, то есть положение или траектория движения объекта определяется исключительно по данным навигационных спутников.
Кинематические измерения позволяют получать координаты точек земной поверхности за короткие промежутки времени. При этом вначале статическим способом определяют координаты первой точки, т. е. выполняют привязку подвижной станции к базовой, называемую инициализацией, а затем, не прерывая измерений, передвижной приемник устанавливают поочередно на вторую, третью и т. д. точки. Для контроля измерения завершают на первой точке либо на пункте с известными координатами, где выполняют статические наблюдения. Точность кинематического способа составляет 2 – 3 см в плане и 6 – 8 см по высоте.
Если имеется цифровой радиоканал и данные с базового приемника в процессе измерений можно передавать на подвижную станцию, координаты получают в режиме реального времени, т. е. непосредственно на определяемой точке.
3.9. Организация геодезических работ
с использованием базовых станций «DGPS»
Использование сравнительно недорогих GPS-приемников класса точности определения координат картографии и ГИС, дающих ошибки до нескольких метров, оказывается возможным и для измерений геодезического класса точности (до 1 см), если использовать методику дифференциального (относительного) позиционирования в режиме работы с базовыми станциями, получившими название «Differential GPS» – «DGPS». Технология дифференциального позиционирования основана на том, что ошибки определения абсолютных координат разными приемниками одних и тех же марок в пределах одного локального участка местности практически одинаковы. Тогда, если установить DGPS-приемник (базовую станцию) в точке с точно известными координатами, можно определять разницу между эталонными и GPS-координатами и ретранслировать поправки по радиоканалам на другие (ведомые) GPS-приемники. Базовую DGPS-станцию устанавливают на точке с известными высотой и плановыми координатами (например, на пункте государственной геодезической сети) либо на пункте, специально созданном в любом удобном месте и привязанном традиционными методами наземной геодезии к пунктам государственной геодезической сети.
Сверхточные измерения с использованием приемников относительно невысокой точности сводятся к непрерывному сбору данных в течение некоторого отрезка времени при неподвижном приемнике и точном знании координат некоторой «опорной» точки, в которой установлена DGPS-станция. Современные GPS-приемники геодезического класса и даже класса картографии и ГИС уже позволяют выполнять съемочные работы в режиме «кинематической съемки», т. е. в режиме перемещения реечников от точки к точке, в каждой из которых координаты мгновенно регистрируются геодезистом на магнитные носители простым нажатием кнопки. То же самое можно делать и при выполнении съемки в реальном масштабе времени плана и профиля существующих автомобильных дорог при их реконструкции с движущегося автомобиля при скорости до 30 км/ч.
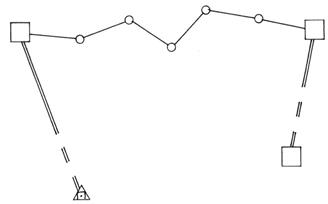
Высокую точность определения координат точек местности при использовании базовых DGPS-станций можно обеспечить приемниками умеренной точности, находящимися на расстоянии в пределах до 10 км от базовой DGPS-станции. Корректирующий сигнал автоматически устраняет все возможные ошибки системы, независимо от того, связаны ли они с неточностью хода часов, ошибками эфемерид или ионосферными и тропосферными задержками радиосигналов. Именно по этой причине в качестве ведомых могут использоваться не только дорогие двухчастотные, но и относительно дешевые одночастотные приемники (рис. 22).
Работу с базовыми опорными DGPS-станциями организуют двумя способами.
В первом способе с опорной станции по телеметрическим каналам ведомым приемникам передаются сообщения об ошибках, а затем их компьютеры обрабатывают эти сообщения совместно с собственными данными о местоположении, определенном по спутниковым сигналам.
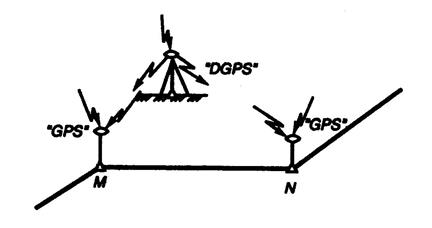
Рис. 22. Схема геодезических измерений
с использованием базовой станции «DGPS»
Во втором способе базовая DGPS-станция работает в режиме «псевдоспутника». Станция передает сигналы той же структуры, что и спутники, т. е. содержащие псевдослучайные коды и информационные сообщения. Ведомые приемники обрабатывают сигналы базовой станции в одном из своих неиспользованных каналов, т. е. получают данные коррекции тем же путем, что и данные об эфемеридах от навигационных спутников орбитального комплекса.
Топографическая съемка с использованием геодезических спутниковых приемников выполняется в три этапа: подготовительные работы, создание геодезического съемочного обоснования, собственно съемка.
В ходе подготовительных работ выбирают места для закрепления точек съемочного обоснования с таким расчетом, чтобы не было помех от расположенных вблизи сооружений, крон высоких деревьев, источников мощного радиоизлучения. Все эти факторы могут существенно снизить качество выполняемых спутниковых измерений. Кроме того, особое внимание уделяется планированию наблюдений, для каких целей используют специальный модуль в программном обеспечении спутникового приемника. Этот модуль позволяет получить характеристику процесса позиционирования на любой момент времени и, таким образом, выбрать наиболее благоприятный период для выполнения измерений.
Определение координат пунктов геодезического съемочного обоснования производится методом статических спутниковых наблюдений. Данный метод является наиболее надежным и точным методом, позволяющим получить разность координат смежных пунктов с миллиметровой точностью. Один из приемников, называемый базовым, устанавливают на штативе над исходной точкой с известными координатами (пункт государственной геодезической сети, геодезической сети сгущения), а второй, называемый мобильным, – поочередно на пункты съемочной сети. При этом должно быть обеспечено условие синхронных измерений базовым и мобильным приемниками.
Длительность времени наблюдений выбирается в зависимости от длин базовых линий, количества одновременно наблюдаемых спутников, класса используемой спутниковой аппаратуры и условий наблюдений. С учетом всех перечисленных факторов время измерения каждой базовой линии может составлять от 15 – 20 мин. до 2,5 – 3 ч. Работа с каждым приемником на станции включает: центрирование приемника над пунктом с помощью нитяного или оптического отвеса, измерение высоты антенны с помощью секционной рейки, включение приемника. При измерении в статическом режиме во время работы не требуется производить каких-либо действий. Приемник автоматически тестируется, отыскивает и захватывает все доступные спутники, производит GPS-измерения и заносит в память всю информацию. По истечении необходимого времени наблюдений мобильный приемник переносят на следующую определяемую точку. После окончания измерений производят обработку полученных результатов, которая включает вычисление длин базовых линий и координат пунктов обоснования в системе координат WGS-84, строгое уравнивание сети по методу наименьших квадратов, трансформирование уравненных координат в государственную или местную (условную) систему координат. Точность определения планового местоположения точек статическим способом достигает (5 – 10 мм) + 1 – 2 мм/км, высотного – в 2 – 3 раза ниже.
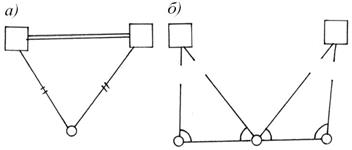
Топографическая съемка местности выполняется посредством проведения кинематических спутниковых измерений, позволяющих получать координаты и высоты точек за короткие промежутки времени. Для этого базовый приемник на штативе устанавливается на пункте съемочного обоснования, а мобильный – поочередно на снимаемые точки, причем приемник вместе с источником питания располагаются в специальном рюкзаке, а приемная антенна и контроллер, с помощью которого осуществляется управление процессом съемки, крепятся на вехе (рис. 23). Вначале выполняется инициализация – привязка мобильной станции к базовой, для чего измерения на первой точке проводят несколько дольше (20 – 30 с), чем на последующих точках. Установив веху с антенной на точку и задав в контроллере все необходимые параметры (высоту установки антенны на вехе, номер пикета, его признак, например: угол забора, смотровой колодец и т. п.), начинают съемку, контролируя вертикальность вехи по пузырьку круглого уровня.

Рис. 23. Базовый (а) и мобильный (б) приемники
Время наблюдения на точке обычно не превышает 5 – 10 с, после чего измерения останавливают и, не выключая приемника, переходят на следующую точку. В случае, если снимаемая точка располагается в непосредственной близости от строения, высоких деревьев, других объектов, закрывающих видимость на спутники, время измерений должно быть увеличено. Кроме того, измерения на такие точки можно повторить, вернувшись на них еще раз. Завершают съемку участка наблюдениями на первой точке либо на пункте с известными координатами. После завершения съемки производят обработку результатов так же, как и в случае статических измерений. Точность способа кинематических измерений составляет 2 – 3 см в плане и 6 – 8 см по высоте. Результаты измерений могут быть представлены как в цифровом виде, так и в графической форме.
3.10. Комплексное использование спутниковой аппаратуры
и традиционных геодезических средств
Для использования технологий спутниковых координатных определений необходимо обеспечение видимости на момент измерений по линии «спутник – антенна приемного устройства». Во многих случаях практики обеспечить такую видимость не удается. Поэтому актуальным становится комплексное использование для решения геодезических задач спутниковой аппаратуры и традиционных геодезических средств (светодальномеров, теодолитов, нивелиров, электронных тахеометров). Наиболее эффективно использование GPS-аппаратуры с электронными тахеометрами. Это обусловлено следующими причинами.
Электронные тахеометры являются универсальными геодезическими приборами. Они предназначены для измерения углов и расстояний. В результаты измерений тахеометром автоматически вводятся поправки за метеоусловия (причем, отдельные тахеометры сами определяют температуру и давление), за приведение длин линий к плоскости горизонта и др. Тахеометры обеспечивают цифровую индикацию горизонтальных и вертикальных углов, дирекционных углов, наклонных расстояний, горизонтальных проложений, приращений координат и других величин. Время на выполнение комплекса измерений (горизонтальное направление + + вертикальный угол + расстояние + вывод результата) составляет несколько секунд. Большинство тахеометров имеют собственную память, встроенный микропроцессор и библиотеку программ для выполнения геодезических работ. Ряд современных тахеометров позволяет выполнять измерения до невидимых точек (например, через листву) с помощью специального отражателя, а также работать с микропризменными наклейками.
Современные тахеометры и GPS-приемники имеют одинаковые форматы записи полевой информации, взаимозаменяемые карты памяти. Возможна также автоматизированная передача полевых измерений в пакет совместной обработки с последующей передачей результатов измерений в базы данных ГИС.
Принципиально возможно использование спутниковой геодезической аппаратуры (СГА) и традиционных геодезических средств по следующим направлениям:
1. Геодезические построения на объекте работ, выполненные СГА, и традиционные не имеют между собой никаких связей.
2. Спутниковые и традиционные геодезические построения связаны между собой. При этом возможно три варианта связей:
развитие сети традиционными методами от пунктов, определенных спутниковыми приемниками;
развитие сети методами GPS-измерений от пунктов, определенных традиционными методами;
ступенчатое развитие сетей, при котором спутниковые и традиционные измерения чередуются между собой.
Традиционными методами определения плановых координат пунктов являются: триангуляция, полигонометрия, трилатерация, засечки. При выборе метода учитываются требуемая точность координатных определений, сроки выполнения работ, характер местности и состояние исходной геодезической основы в районе выполнения работ, прогноз погоды, условия видимости и пр.
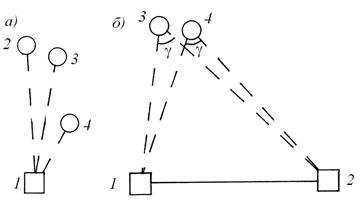
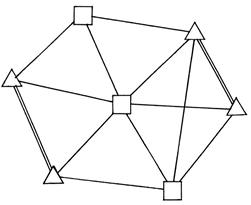
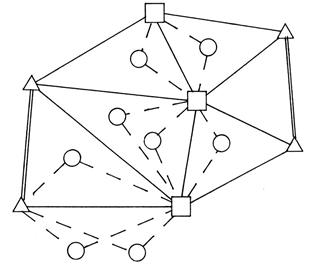
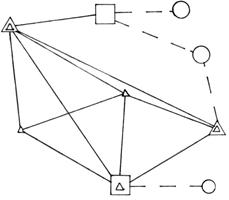
Определение координат пунктов с помощью СГА может выполняться следующими методами: лучевым (рис. 24), сетевым (рис. 25), совмещенным (рис. 26).
Оформление рисунков выполнено в следующих условных знаках:
Треугольник – исходный пункт сети с известными координатами в системе, установленной проектом работ.
Квадрат – опорная станция в сети.
Круг – мобильная станция в сети.
При лучевом методе определяемые пункты координируются с одного опорного пункта (рис. 24, а). Рассматриваемый метод часто называют радиальным. Он широко используется для выполнения топографических съемок в кинематическом режиме. Недостаток лучевого метода заключается в отсутствии контроля определения координат. Для организации такого контроля определяемые пункты при развитии геодезической сети лучевым методом координируются не менее, чем с двух опорных пунктов (рис. 24, б).
| 
|
| Рис. 24. Лучевой метод из одного (а) и двух (б) опорных пунктов | Рис. 25. Сетевой метод |
Укажем на важную особенность координатных определений с помощью спутниковой аппаратуры. Пусть определяемые точки 3, 4 находятся на расстоянии 100 м одна от другой и на удалении ≈ 10 км от опорных пунктов 1, 2 (рис. 24, б). Угол засечки g примем равным 45°. Пренебрегая ошибками центрирования, вычислим среднюю квадратическую ошибку положения определяемых точек по формуле
 , (18)
, (18)
где mS – ошибка измерения расстояния, в статическом режиме для двухчастотной аппаратуры примем mS = 5 мм + 1 мм∙ S км = 15 мм.
В результате получим mXY = 30 мм. Средняя квадратическая ошибка взаимного положения пунктов 3, 4 будет равна  = 42 мм, что при расстояниях между определяемыми точками 100 м дает относительную ошибку 1:2400. Такая точность существенно ниже той, которая могла бы быть получена при непосредственном измерении линии 3 – 4 как с помощью СГА, так и топографическими светодальномерами.
= 42 мм, что при расстояниях между определяемыми точками 100 м дает относительную ошибку 1:2400. Такая точность существенно ниже той, которая могла бы быть получена при непосредственном измерении линии 3 – 4 как с помощью СГА, так и топографическими светодальномерами.
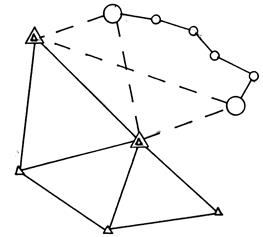
Сетевой метод спутниковых координатных определений предполагает проведение измерений на каждой линии сети (см. рис. 25). Это, по сути, аналог трилатерационных построений.
При сетевом методе целесообразно использовать несколько одновременно работающих станций. Это позволяет в каждом сеансе наблюдений измерять не только запроектированные линии, но и дополнительные, соединяющие любую пару, участвующих в наблюдениях приемников. По окончании сеанса часть станций остается на месте, а другие устанавливаются на следующих, согласно проекту, пунктах. В очередном сеансе линии между пунктами первой группы измеряются повторно, что позволяет осуществлять контроль их определения. При значительном числе двойных измерений можно выполнять предварительный контроль качества измерений по их разностям.
При использовании сетевого метода контроль качества измерений осуществляется также по невязкам замкнутых построений. В итоге, сетевой метод позволяет за счет избыточных измерений существенно повысить точность и надежность координатных определений.
При совмещенном методе часть пунктов сети определяется сетевым, а часть пунктов лучевым методами (рис. 26).
| 
|
| Рис. 26. Совмещенный метод | Рис. 27. Полигонометрический ход опирается на пункты GPS-сети |
Рассмотрим теперь схемы геодезических построений, в которых спутниковые и традиционные геодезические построения связаны между собой. В этом случае возможны различные варианты (рис. 27 – 30).
| 
|
| Рис. 28. Определение координат пункта засечками от GPS-пунктов: а – линейные; б – обратные линейно-угловые группы пунктов | Рис. 29. Сеть GPS опирается на традиционную |
Использование спутниковых приемников и электронных тахеометров весьма эффективно при выполнении топографических или кадастровых съемок. Для этого на объекте работ GPS-методом определяется сеть пунктов (минимум 2 пункта). Тахеометр устанавливается в любом месте, удобном для проведения съемок. Координаты точек стояния тахеометров определяются по координатам GPS-пунктов любой из известных засечек (варианты приведены на рис. 28). Съемка выполняется обычным порядком.
| 
|
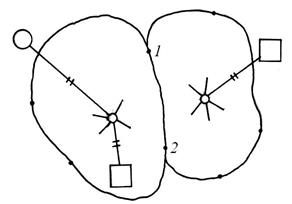
| Рис. 30. Ступенчатое развитие сетей | Рис. 31. Блочная тахеометрия |
Если с какой-либо точки стояния тахеометра нет видимости на GPS-пункты и соответственно невозможно определить координаты точек стояния, то можно использовать принцип блочной тахеометрии (рис. 31).
В этом случае участок разбивается на блоки, в пределах каждого из которых выполняется съемка с одной установки электронного тахеометра. В программу наблюдений включаются, кроме пикетов, имеющиеся в блоке исходные пункты и связующие точки (1 и 2 на рис. 31).
По связующим точкам осуществляется последующее объединение отдельных блоков в единый блок. Число связующих точек между смежными блоками должно быть не менее двух. Особенностью метода является то, что необязательна видимость между смежными установками тахеометра.
3.11. Решение традиционных геодезических задач
с применением навигационных приемников
Рассмотрим возможные варианты решения традиционных геодезических задач на примере применения спутниковых приемников начального уровня eTrex (Garmin).
Garmin и другие производители навигационной аппаратуры пользователя выпускают значительное количество приемников, различающихся наличием различных функций, интерфейсов, конструктивными особенностями корпуса, размером жидкокристаллического экрана, объемом встроенной памяти и возможностями установки дополнительных карт памяти. Большинство современных навигационных приемников позволяет устанавливать карты местности и на ней следить за перемещением приемника, у более совершенных моделей есть возможность трассировки маршрута и звуковое путеуказание. Список дополнительных функций у вновь создающихся навигационных приемников постоянно пополняется, они уменьшаются в размерах и скорее всего в ближайшем будущем найдут широкое применение в мобильных телефонах, электронных часах и другой мобильной технике. Однако основные приемы решения топографо-геодезических задач не зависят от наличия сервисных функций и принадлежности навигационного приемника к той или иной спутниковой системе. Поэтому спутниковый приемник eTrex, в котором установлен минимальный набор сервисных функций, является хорошим инструментом для изучения основ применения спутниковых приемников при решении ряда традиционных геодезических задач: глазомерная и топографическая съемка, составление абрисов, определение площадей и кадастровая съемка, привязка объектов, трассировка протяженных объектов, вынос проекта в натуру.
Date: 2015-09-18; view: 1609; Нарушение авторских прав