Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Сегмент потребителя
|
|
Сегмент потребителя представляет собой комплект спутникового оборудования, позволяющий получать координаты пункта наблюдений, точное время, а также скорость и направление перемещения объекта. Во время работы осуществляется прием радиосигналов со спутников, регистрируются определяемые величины, производится предварительная обработка результатов непосредственно в полевых условиях, и затем в камеральных условиях выполняется окончательная обработка (так называемая «постобработка») материалов, позволяющая получить окончательные значения величин, интересующих потребителя. Спутниковая аппаратура может быть использована для военных целей и поэтому должна работать оперативно и надежно при ведении боевых действий. При этом создаются условия, при которых использование системы позиционирования было бы недоступно для потенциального противника. Гражданское применение спутниковой аппаратуры ориентировано на ее использование в навигации, а также в геодезии.
Спутниковая геодезическая аппаратура состоит из целого набора аксессуаров. В комплект одного спутникового приемника входят: антенна, приемник, контроллер (управляющее устройство), блок питания (для зарядки аккумуляторов и питания от сети), аккумуляторы или батареи, кабели, штатив или вешка, а также устройства крепления или установки антенны на них, рюкзак или кейс, чехлы и пр. оснащение. При работе в режиме реального времени необходим радиомодем с блоком питания и радиоантенна. Для обработки результатов наблюдений – компьютер и программное обеспечение.
К настоящему времени разработаны десятки типов аппаратуры пользователя для морской и воздушной навигации, геодезии и других целей. Уже функционируют десятки тысяч приёмников сигналов спутников системы GPS.
Навигационные определения координат с использованием P- кода обеспечивают точность автономного (без привязки к опорным пунктам) непрерывного знания координат места с точностью ~3 – 5 м. Точность определений с использованием C / A -кода ниже - ~30 – 50 м. Точность в обоих случаях ограничивается погрешностями измерения времени поступления на приемник пользователя излучённых спутником C / A и P -кодов, влиянием на результаты измерений условий распространения радиосигналов, ошибками определения орбиты. Большей точности (1 - 2 м) достигают, используя дифференциальный метод измерений, когда определяется положение одного пункта относительно другого.
Такая точность в полной мере удовлетворяет нужды морской и воздушной навигации. Благодаря легкости и малым габаритам приёмников GPS, они находят применение в геологии, рекогносцировочных изысканиях, туризме, военном деле, в оборудовании автомобилей.
При использовании системы для решения геодезических задач, выполняя измерения непосредственно на несущих частотах L 1 и L 2 и применяя дифференциальный метод, достигают очень высокой точности - около 1:1000 000 расстояния между пунктами.
В настоящее время спутниковые приемники выпускают более 400 фирм, и они характеризуются сравнительно большим разнообразием, но отличительные особенности приемных устройств, выпускаемых различными фирмами, в большинстве случаев, носят непринципиальный характер.
3.3. Определение координат измерением псевдодальностей
с помощью кодов
Задачей глобальной спутниковой системы является определение координат объектов (судов, самолётов, объектов на суше). При всём разнообразии выпускаемых приборов в состав аппаратуры пользователя всегда входят: антенный блок, блок приёмника и вычислительно-управляющий блок, оформляемые часто в виде единого прибора, который для краткости будем называть приёмником. В таком приёмнике, как и на спутнике, имеется датчик частот L 1 и L 2 (бывают и одночастотные приёмники) и измеритель времени – часы. Также генерируются подобные спутниковым C / A- и P- коды (последний – если доступ к нему санкционирован, то есть известны правила его формирования, изменяемые каждую неделю).
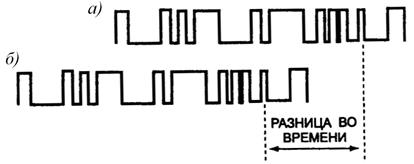
Рис. 16. Двоичные синхронные сигналы,
вырабатываемые передатчиком спутника (а) и приемником (б)
Приемник измеряет интервал времени между формированием собственного кода и поступлением кода от спутника. Если бы часы приёмника были точно синхронизированы с часами спутника, то формирование кодов везде происходило бы одновременно, и интервал времени между появлениями на приёмнике собственного кода и кода, пришедшего от спутника, был бы равен времени движения сигнала от спутника до приёмника, что позволило бы, измерив его, вычислить расстояние спутник - приёмник. Однако показания часов спутника и приёмника расходятся на некоторую величину d s - d i, где d s - поправка часов спутника и d i - поправка часов приёмника. Поэтому расстояние r от приёмника до спутника равно
r = R + c (d s - d i) + dion, (8)
где R - измеренное значение расстояния, существенно отличающееся от верного и потому называемое псевдорасстоянием; c – скорость света; dion - задержка сигнала в ионосфере и тропосфере.
Задержка сигнала в ионосфере ослабляется особым комбинированием измерений, выполненных на двух разных частотах (что делает двухчастотные приемники более точными), или введением поправки, вычисляемой с использованием параметров, содержащихся в навигационном сообщении. Меньшая по величине тропосферная задержка исключается введением поправки, вычисляемой по метеорологическим данным.
Поправку d s часов спутника, ежесуточно контролируемую наземным комплексом системы, можно считать известной, а остаточную погрешность в ней - малой по сравнению с неизвестной поправкой часов приёмника. Учитывая названные поправки, получим: r = R - c d i.
Для определения координат пункта i измеряют несколько псевдорасстояний R до разных спутников s и в разные моменты времени t.
Чтобы различать в дальнейшем результаты измерений и другие переменные, относящиеся к разным пунктам, спутникам и моментам времени, при соответствующих обозначениях будем указывать в нижнем индексе знак определяемого пункта, в верхнем индексе - имя спутника, а в скобках - момент времени (эпоху). Например, расстояние от пункта i до спутника s в эпоху t запишется так:  .
.
Перенеся измеренные величины в левую часть равенства, а определяемые - в правую, для соответствующего псевдорасстояния напишем уравнение
 , (9)
, (9)
где
 . (10)
. (10)
В уравнении (9) неизвестными являются: xi, yi, zi, d i (t). При числе наблюдаемых спутников ns и числе эпох измерений nt общее число уравнений (9), равное числу выполненных измерений, будет nsnt. Решением системы таких уравнений находят координаты пункта i и поправку часов d i (t). Полагая приёмник i неподвижным, а смещение часов изменяющимся, находим, что число неизвестных равно 3 + nt (3 координаты и nt поправок часов). Для определения названных неизвестных необходимо, чтобы число измерений было не меньше числа неизвестных, т. е. nsnt ³ 3 + nt. Так, если измерения ведутся на 4 спутника (ns = 4), то должно соблюдаться неравенство 4 nt ³ 3 + nt, из которого видно, что для определения координат приёмника достаточно одной эпохи измерений. Легко проверить, что при наблюдении двух спутников необходимы две эпохи измерений.
При использовании C/A -кода погрешность измерения псевдорасстояний составляет несколько метров, а при использовании P -кода - доли метра. К этой погрешности добавляются погрешности координат спутников, остаточные погрешности влияния ионосферы и другие. В результате координаты получают с помощью С/А -кода с точностью 25 – 30 м, а с помощью Р -кода – 3 – 5 м.
Date: 2015-09-18; view: 556; Нарушение авторских прав