Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
СКП поперечного зсуву. Виведення формули
|
|
При вимірювання кутів допустили похибку при виміряні 1 куту, а всі решта безпомилкові. Точка переміститься на величину  поперечного зсуву.Похибка в 1 та 2 кутах, кінцева точка зміститься на
поперечного зсуву.Похибка в 1 та 2 кутах, кінцева точка зміститься на  і т.д. В кожному куті є похибка
і т.д. В кожному куті є похибка  +
+  -загальна,
-загальна,  ,
,  ,
,  .(2).Підставимо в вираз (2),значення окремого зміщення (1), буде:
.(2).Підставимо в вираз (2),значення окремого зміщення (1), буде:  +…
+…  (3).Для того, щоб разрахунки були простішими візьмемо,що всі сторони рівні між собою. S1=S2=…=Sn=S.Тоді формула (3) матиме такий вигляд
(3).Для того, щоб разрахунки були простішими візьмемо,що всі сторони рівні між собою. S1=S2=…=Sn=S.Тоді формула (3) матиме такий вигляд  +S(n-1)
+S(n-1)  .Переходячі до середньої квадратичної помилки,отримаємо для середнього квадратичного значення поперечної невязки
.Переходячі до середньої квадратичної помилки,отримаємо для середнього квадратичного значення поперечної невязки  =
=  , але
, але  тоді
тоді  . Перетворимо отриманий вираз.Помножимо чисельник і знаменник правої частини на n ш помножимо sn=L, отже
. Перетворимо отриманий вираз.Помножимо чисельник і знаменник правої частини на n ш помножимо sn=L, отже  L
L  .Спростимо деякі підкореневі вирази:розкриємо дужки, а потім кожний доданок в чисельнику і знаменнику поділимо на
.Спростимо деякі підкореневі вирази:розкриємо дужки, а потім кожний доданок в чисельнику і знаменнику поділимо на  , отриманий в чисельнику останній член, який равен 1/2n-відкинемо.Отримаємо:
, отриманий в чисельнику останній член, який равен 1/2n-відкинемо.Отримаємо:  L
L 
8.СКП положення точки зігнутих ходів.
Хід без попереднього зрівнювання кутів  .Хід з попереднім зрівнюванням
.Хід з попереднім зрівнюванням 
 -середня квадратична похибка вирівнювання кутів.
-середня квадратична похибка вирівнювання кутів.  -середня квадратична помилка вимірювання довжини сторони.
-середня квадратична помилка вимірювання довжини сторони.  .відстань від кінцевої точки ходу до кожної точки ходу.
.відстань від кінцевої точки ходу до кожної точки ходу.  -відстань від центра тяжіння до кожної точки ходу.
-відстань від центра тяжіння до кожної точки ходу.
9.СКП положення точки витягнутих ходів.
 хід витягнутий без поперечного зрівнювання кутів.
хід витягнутий без поперечного зрівнювання кутів.  - з попереднім зрівнюванням кутів. В залежності від кількості кутів може відрізнятися. Якщо є можливість, потрібно попередньо розкинути нев’язку на кути.L-довжина ходу,n-кількість сторін,⍴=206265, -середня квадратична похибка вирівнювання кутів. -середня квадратична помилка вимірювання довжини сторони.
- з попереднім зрівнюванням кутів. В залежності від кількості кутів може відрізнятися. Якщо є можливість, потрібно попередньо розкинути нев’язку на кути.L-довжина ходу,n-кількість сторін,⍴=206265, -середня квадратична похибка вирівнювання кутів. -середня квадратична помилка вимірювання довжини сторони.
10.Знаходження центра тяжіння зігнутого ходу п/м ходу аналітичним методом
На кальку з розміченою координатною сіткою переносять хід полігонометрії. Визначають координати кожної точки полігонометрії. Розраховують координати центру ваги ходу за формулами  .При обчислені в умовній системі з а початок координат беруть одну із вихідних точок ходу, вісь ординат спрямовують на замкненій,а вісь абцис перпендикулярно до неї.Координати центра ваги в умовній системі знаходять з точнітю до 10м.
.При обчислені в умовній системі з а початок координат беруть одну із вихідних точок ходу, вісь ординат спрямовують на замкненій,а вісь абцис перпендикулярно до неї.Координати центра ваги в умовній системі знаходять з точнітю до 10м.
11. Знаходження центра тяжіння зігнутого ходу п/м графічним методом
На карті або на папері в масштабі наносять запроектований хід. Спочатку визначають центр ваги ходу. Для цього першу сторону ходу ділять наполовину, одержану точку а з’єднують з наступною точкою ходу, отриману лінію ділять на три частини, відмічають точку в, яка віддалена від а на 1/3 лінії, потім точку в з’єднують з наступною точкою ходу і т.д. до кінцевої точки ходу. Після знаходження центру ваги значення Дці знаходять безпосередньо на схемі ходу з графічною точністю.
12. критерії зігнутості ходу.
Хід вважається зігнутим якщо:
Хоч 1 кут між замикальною і будь-якою іншою стороною ходу більше 24°
Відношення довжин сторін до замикальної буде більше 1,3: [S]/L>1,3
Хоч 1 точка ходу вийде за коридор шириною 2а, де а=L/8.
Щоб побудувати коридор потрібно провести лінію паралельну замикальній через центр тяжіння ходу.від точки відкласти в обидві сторони довжину а і провести лінії паралельні замикальній.якщо хоч 1 критерій каже що хід зігнутий,то хід зігнутий.
13. методи послаблення впливу кутових і лінійних похибок на СКП точки
 - в итягнутий хід, де [ mS2]-похибки повздовжнього зсуву, (n+3/12)-похибки поперечного зсуву
- в итягнутий хід, де [ mS2]-похибки повздовжнього зсуву, (n+3/12)-похибки поперечного зсуву
Збільшити точність треба зменшити похибкуЗменшити кількість сторін
Для зменшення поперечного зсуву
Збільшити точність – зменшити похибку
Зменшити кількість сторін
Зменшити довжину ходу
Розбити хід на декілька ланок додатковими дирекційними напрямами(десь в середині ходу ми визначаемо довжину якоїсь лінії)
Додатковий дирекційний напрям визначається астрономічними спостереженнями.

К=α
14. проектування полігонометрії, критерії.
Проектуванню передує етап-збір матеріалу. Необхідно визначити які геод роботи були виконанні на ділянці,зібрати усі карти,вихідні пункти,які є на ділянці(наявність підземних комунікацій,фізико-географічні умови)
Проектування викон на карті в масштабі 1:25000 на карті викон контур обєкту,необхідно обстежити вихідні пункти.
Проектування – це вибір з багатьох варіантів одного, який би відповідав вимогам інструкції і був економічно доцільним.
Умови:
1.пункти розміщують в місцях довготривалого зберігання (вздовж дорог, ж/д,на полі)
2. не може бути в чистому полі,болотяних грунтах в місцях майбутнього будівництва.
3. має бути зручність спостереження на всіх пунктах.
4.хід не повинен бути вилковидної форми.
15. розрахунок точності п/м ходів(∆с=Мв)
Точність ходу х-ться граничною похибкою точки ходу в слабому місці,після вимірювання.
Слабке місце-це точка,яка найбільш віддалена від пунктів.
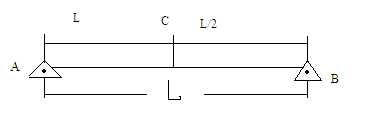
Вага точки-це є величина обернено пропорційна скп.
Р=1/m2 PB=1/L (В – точка В)
Рс́=1/(L/2)=2/ L=2 PB (від А до С)
Рс˝=1/(L/2)=2/ L=2 PB (від В до С)
Рс= Рс́+ Рс˝=2 PB +2 PB=4PB
1/m2c=4/m2B →mc=mB/2, Mc – скп
Гранична похибка ∆с=2 mc ∆с=2* mB/2 ∆с=mB
Отже гранична похибка точки в слабкому місці ходу після вирівнювання = скп точки в кінці ходу до вирівнювання. Є два види розрахунку точності:прямий і обернений.
Обернений розрахунок викон для визначення точності вимірюванння ліній mS і кутів mβ та вибору за цими величинами відповідних приладів для вимір кутів відліку. Прямий розрахунок -виконують для перевірки відповідності запроектованого ходу в проектному завданні.
16. прямий розрахунок в п/м
Прямий розрахунок -виконують для перевірки відповідності запроектованого ходу в проектному завданні.
Якщо хід 4 класу,витягнутий і з попереднім вимірюванням кутів.
[S]=9км, Sсер=0,8 км, n=11, mβ=3˝, mS =20мм, 1/Т=1/25000.
М2=[ mS2]+ (mβ2/ρ2)* L2*(n+3/12),де mS=а+b+Sкм
[ mS2]= mS2* n
М2=(400*10-6*11)+(9*81*106*14/4*1010*12)= 0,025,де
Ρ=2*105
М2=0,025(м2), М=0,16м =∆
∆/([S]/2)=2∆/[S]=0,32/9(м)=1/28125≤1/2500.
[s]-довжина ходу, s-середня довжина лінії ходу, n-к-сть сторін. М=Δс – гранична похибка після вирівнювання.
17. обернений розрахунок в п/м
обернений розрахунок викон для визначення точності вимірюванння ліній mS і кутів mβ та вибору за цими величинами відповідних приладів для вимір кутів відліку.
Хід витягнутий 4 класу, довжина ходу [S]=9км, Sсер=0,8 км, n=11
1/Т=1/25000.
М2=[ mS2]+ (mβ2/ρ2)* [S]2*(n+3/12)
∆=2М, М=[S]/2Т=9000/25000=0,18м
Коли складові функції невідомі,то ми можемо застосувати принцип рівного впливу:
[ mS2]= (mβ2/ρ2)* [S]2*(n+3/12)= М2/2
Оскільки у нас сторони пгм ходу вимір тільки віддалемірами,то
[ mS2]= mS2* n
[ mS2]= М2/2=0,182/2=180мм/2=32400/2=16200мм2
mS2* n=16200→ mS2=16200/11=1473 мм2
mS=(1473)½=38мм
Вибирають прилад у якого похибка менша за 38мм на 0,8 км.


В цьому випадку беруть теоделіт Т2
[s]-довжина ходу, s-середня довжина лінії ходу, n-к-сть сторін. М=Δс – гранична похибка після вирівнювання.
18. рекогностування пунктів п/м та закріплення їх грунтовими центрірами.
Рекогностування-це процес перенесення проекту на місцевість.в результаті вибирають конкретне місцеположення знака, щоб була видимість на інші пункти.узгодження місцеположення пункту з власниками підземних комунікацій, якщо шось заважає, потрібно перенести знак
-.знах в місцях довготривало зберігання.(забезпечення прямою видимістю)
-вибирають місце зі зручним спостереженням.закладка центрів відбувається грунтовими або стінними знаками. Центри також бувають різні. Грунтові центри бувають такі:
-У15 – закладаються на місцевості з твердим покриттям, верх центру розташовуються на рівні з поверхнею.
-У15К – центри, призначені для міст Києва, Севастополя і обласних центрів.
-У15Н – центри, які закладаються на незабудованих територіях.
19. закріплення пунктів п/м відновлювальними стінними знаками.
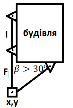
В забудованій місцевості пункти закріплюють стінними знаками: відновлювальними або орієнтирними. Відновлювальні стінні знаки не мають координати,з їх допомогою знах місце положення тимчасових центрів.Вони бувають створні і трикутні.Створні:
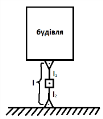
Створний знак Створний знак між двома будинками

Створний знак з контролем Створний знак на перетині двох створів
Створ – це слід вертикальної площини.
Стінні знаки закріплюють на одній висоті. Відстань від будівлі не менше 20 м до тимчасового центру. Трикутні:

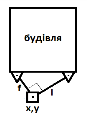
а) рівносторонній; б) прямокутний;

в) рівнобедрений; г) довільний
для підвищення точності беруть 3 стінні знаки. Вибираємо стін знаки(закладаємо) відносно їх закріплюємо тимчасові центри.
20. карточка закріплення пунктів п/м.
Після закріплення пунктів п/м склад карточку закріплення. Вона необхідна для знах данного пункту будь-яким виконавцем,через будь-який час. Формат карточки А5.
На карточці знаходиться повна характеристика кроків полігонометрії та абрис зображувального пункту, описується його місцезнаходження. Довжини мають бути з точністю 1 см.Карточку підписують номер та тип центру,організацію та виконавця.
21. закріплення пунктів п/м орієнтирними стіними знаками.
На забудованій території пункти полігонометричного ходу закріплюються тимчасовими центрами, а центри закріплюють стінними знаками. Стінний знак заклад перпендикулярно до будівля.передача координат на стінні знаки відбувається одночасно з проведенням кутових вимірювань в пгм.орієнтирні відновити легше чим створні.Існує 2 види стінних знаків: Відновлювальні;Орієнтирні;
Орієнтирні стінні знаки мають координати. З їх допомогою знаходять координати будь-якої точки поблизу тимчасового центру.
Основний метод передачі координат пункту полігонометрії на орієнтирний стінний знак є полярний метод (можливий також кутовий метод, лінійна засічка, метод редукування).
Орієнтирні стінні знаки поділяються:
- Окремі;
- Подвійні;
- Потрійні;
А) Окремі Б) Подвійні
 В) Потрійні
В) Потрійні
22. прилади для вимірювання кутів в п/м, їх х-ки та дослідження.
Основними приладами для вимірювання кутів в прокладенні пгм ходів являються точні оптичні теодоліти 2Т2,2Т5 і 2Т5к. Теодоліти Т2 і 2Т2 викор в пгм 4 класу,1 і 2 розряду, теодоліти Т5, 2Т5 і 2Т5к в пгм 1 і 2 розряду.
Ціллю дослідження є визначення якості і технічних характеристик теодоліта, на основі яких судять про працездатність теодоліта для вимірювання кутів з заданою точністю.
Досліджують оптичну якість зорової труби, визначають збільшення зор труби Г (за доп рейки), кут нахилу поля зору 2ω (за доп горизонтального круга),скп суміщення кінців зображення штрихів гориз круга(роблять два суміщення зображень штрихів і при кожному беруть і записують відлік по шкалі мікрометра в журнал.За отриманими значеннями знаходять різницю d=1-2. Отже скп буде
 ).
).
У теодолітов Т2 і 2Т2 величина m для горизонтального круга не більше 0,5”
Значенння різниць d отриманих на різних установках лімба не повинні перевищувати величини 2m√2 (якщо перевищує,то повторюють спостерігання)
Також визначають рен оптичного мікрометра(різницю між номінальною величиною напівподілки круга і величиною,що визначена за доп мікрометра),ексцентриситет алідади горизонтального круга(неспівпадання точки С’ перетину осі обертання алідади з площиною лімба і центра С) максимальне значення кутового ексцентриситету(неспівпадання осей алідади і круга
εмаксимал=2εкруга+2εосей)
23.Перевірка рівня та колімаційної похибки в теодоліті.
Вісь циліндричного рівня повинна бути перпендикулярна до вертикальної осі обертання теодоліта.Віссю циліндричного рівня наз.дотичну в нуль-пункті шкали рівня.Ця дотична горизонтальна тільки тоді, коли середина бульбашки розміщена в нуль-пункті.За вертикальну вісь теодоліта прийнято вважати вертикальну вісь обертання алідади.Під час викон цієї перевірки рівень встановлюють приблизно паралельно до лінії,що з’єднує будь-які два підіймальні гвинти.Виводять середину бульбашки у нуль-пункт шкали рівня, а потім повертають алідаду на 180.Під час виконання сформульованої вимоги середина бульбашки повинна залишатися в нуль-пункті.Якщо середина бульбашки зміщується від нуль-пункта, тоді виправними гвинтами рівня переміщають бульбашку на половину дуги відхилення.У результаті змінюється розташування осі рівня у вертикальній площині,так,що вона стає перпендикулярною до вертикальної осі обертання теодоліта.
Вісь круглого рівня повинна бути паралельною до вертикальної осі обертання теодоліта.Віссю сферичного рівня наз нормаль до сферичної поверхні у центрі сферичного рівня.Центром сфер рівня є центр малого кола(радіусом1,0-1,5мм).Для перевірки виконання умови найпростіше привести вертикальну вісь теодолітау прямовисний стан за доп перевіреного циліндричного рівня.Тоді у разі виконання умови паралельності осі сферичного рівня повинен збігатися з центром сфер рівня.Під час юстирування бульбашку переміщують за допомогою трьох виправних гвинтів чверть рівня, розташованих у нижній частині рівня.
Візирна вісь зор труби повинна бути перпендикулярною до гор осі обертання труби.Візирна вісь-уявна лінія, що проходить через центр сітки ниток та центр об’єктива. Величину не перпендикулярності цих осей наз колімаційною похибкою.Наявність колімаційної похибки визначають наведенням зор труби на одну і ту саму далеку точку при КП та КЛ.Кожне наведення труби супроводжують відліками гор круга.За відсутності кол похибки різниця відліків повинна становити 180.Значення кол похибки визн за формулою: c={a-(b+-180)}/2
c-кол похибка; a і b-відліки гор круга відповідно при КП та КЛ.Якщо кол похибка с>10'',її мінімізують.Для цього знаходять середній відлік, який дор: сс.в.= {a+(b+-180)}/2
24.Перевірка МО або MZ оптичного центриру в теодоліті.
МО-це відлік по вертикальному кругу коли візирна вісь горизонтальна,а бульбашка рівня при алідаді гор.круга знах в нуль-пункті.
МО-повинно бути постійним і близьким до 0о і відрізнятися не більше на1,5'.
Спостерігають віддалену точку і в положеннях КЛ і КП беруть відліки по верт кругу.
МО=(КЛ+КП)/2 Встановлюють на вертикальному крузі середнє значення.Точка зміститься вздовж вертикальної нитки.Відлік встановлюють навидним гвинтом зор труби.До перехреста зобр в точки переміщують вертик встановлені за доп гвинтів сітки, попередньо ослабивши 1із гор гвинтів на 1/4оберти.
Примітка:після юстирування МО обов’язково перевіряють колімаційну похибку
25.Перевірка осі обертання труби та сітки ниток в теодоліті.
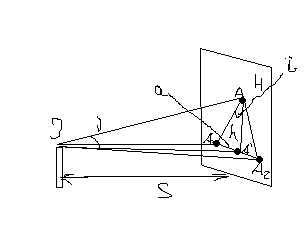
Гор вісь обертання зор труби повинна бути горизонтальною-перпендикулярною до вертикальної осі теодоліта.За відсутності кол похибки і горизонтальності осі обертання труби візирна вісь труби(під час обертання)описує вертикальну площину,яку і повинна створювати зорова труба теодоліта.Якщо вісь обертання труби не горизонтальна, то труба, точніше, візирна вісь(під час обертання)буде описувати нахилену площину,що під час вимірювання горизонтальних кутів буде вносити значні різниці у значення кутів, вимір при КЛ та КП.Негоризонтальність(кут нахилу осі і) можна визначити так.На гор ділянці земної поверхні встановлюють теодоліт на віддаліS=20-30м від вертикальної стіни будинкуH. S=I=A'вибирають на стуні довільну, помітну точку А.Приводять теодолііт у робочий стан,наводять трубу на точку А та,повертаючи трубу у вертикальній площині,проектують точку А на горизонт теодоліта при двох розташуваннях круга-КЛ та КП. Відмічають на стіні 2точки А1 та А2.Якщо точки А1 та А2збігаються,умова викон.Під час нахилу осі обертання на кут і'',візирна вісь описуватиме нахилені площини,слідами(лініїАА1та АА2)Визн половину гор віддалі між точками А1 та А2, тобто а=А1А',а також вимір вертикальний кут ν.
і''=аρ''/h h/S=tg ν h=Stgν i''=(aρ'')/ Stgν
Виправити розташування осі обертання труби, щоб позбутися кута i''для оптичних та електронних теодолітів, можливо тільки в оптичній майстерні.
Сітка ниток має бути встановлена правильно:верт нитка повинна бути прямовисною,а гор нитка-горизионтальною.У теодолітах перевіряють вертикальну нитку.Для цього спочатку алідаду та лімб за доп циліндричного рівня встановлюють у робочий стан.Потім по віддалі 20-50м від теодоліта підвішують висок на довгій нитці.Трубу наводять на нитку так,щоб верхній кінець вертикальної нитки сітки ниток збігався з якоюсь точкою нитки з виском.Тоді по всій довжині вертикальна нитка сітки повинна збігатися з ниткою з виском.Достатньо перевірити вертикальну нитку,оскільки заводи,що виготовляють теодоліти,забезпечують взаємну перпендикулярність ниток сітки.Юстирування викон відповідним повертанням сітки ниток так,щоб нитки сітки і прямовисна нитка з виском збігалися по усій довжині.
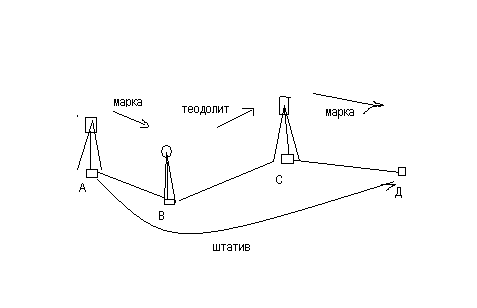
26.Вимірювання кутів за три штативній системі.
Вимірювання кутів в пгм ході виконуються з застосуванням три штативної системи,яка дозволяє,з однієї сторони,послабити вплив похибок центрування і редукції на передачу дир. кутів у ході,і з іншого боку значно повисить подвиг робот.
Комплект приборів,застосовується при вимірюванні кутів за три штативною системою,повинен задовольняти слідкуючій умові:при заміні теодоліта візирною маркою або оптичним центриром осі останніх повинні займати у просторі те саме положення,яке займала вісь обертання теодоліта.
До теодоліту Т2 за особливим заказом виготовляють комплект приборів для вимірів кутів за три штативною системою включає:4візирні марки,зпідставки,3штатива з виском і інші прилади.
Для вимірів кутів в пгм ході за три штативною системою установлюють 3сусідніх вершинах А,В,С хода три штатива з закріпленими на них підставками.На задньому і передньому штативах А і С установлюють візирні марки, на середньомуВ-теодоліт.Марки і теод центрують і приводять у робоче положення.Після вимірювань кута штатив з підставкою з Апереносять в Д,а два інших штатива залишаються на місці.Марку,стоящу у точці А переставляють у підставку, установлену в тВ.Теодоліт ставлять у підставку тС, а передню марку з тС переносять у т.Д.
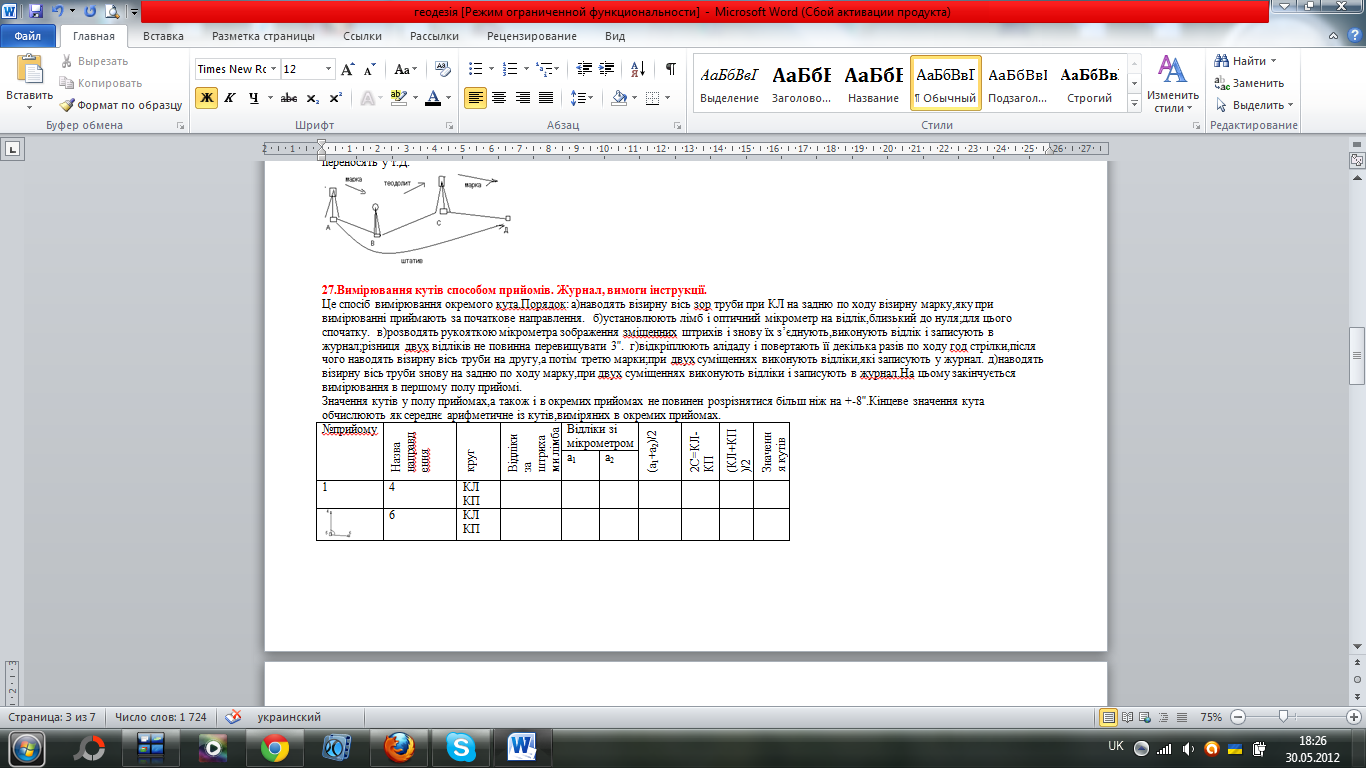
27.Вимірювання кутів способом прийомів. Журнал, вимоги інструкції.
Це спосіб вимірювання окремого кута.Порядок: а)наводять візирну вісь зор труби при КЛ на задню по ходу візирну марку,яку при вимірюванні приймають за початкове направлення. б)установлюють лімб і оптичний мікрометр на відлік,близький до нуля;для цього спочатку. в)розводять рукояткою мікрометра зображення зміщенних штрихів і знову їх з’єднують,виконують відлік і записують в журнал;різниця двух відліків не повинна перевищувати 3''. г)відкріплюють алідаду і повертають її декілька разів по ходу год стрілки,після чого наводять візирну вісь труби на другу,а потім третю марки;при двух суміщеннях виконують відліки,які записують у журнал. д)наводять візирну вісь труби знову на задню по ходу марку,при двух суміщеннях виконують відліки і записують в журнал.На цьому закінчується вимірювання в першому полу прийомі.
Значення кутів у полу прийомах,а також і в окремих прийомах не повинен розрізнятися більш ніж на +-8''.Кінцеве значення кута обчислюють як середнє арифметичне із кутів,виміряних в окремих прийомах.
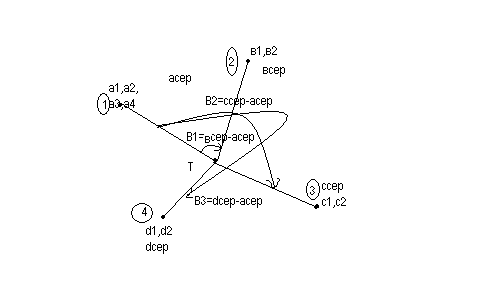
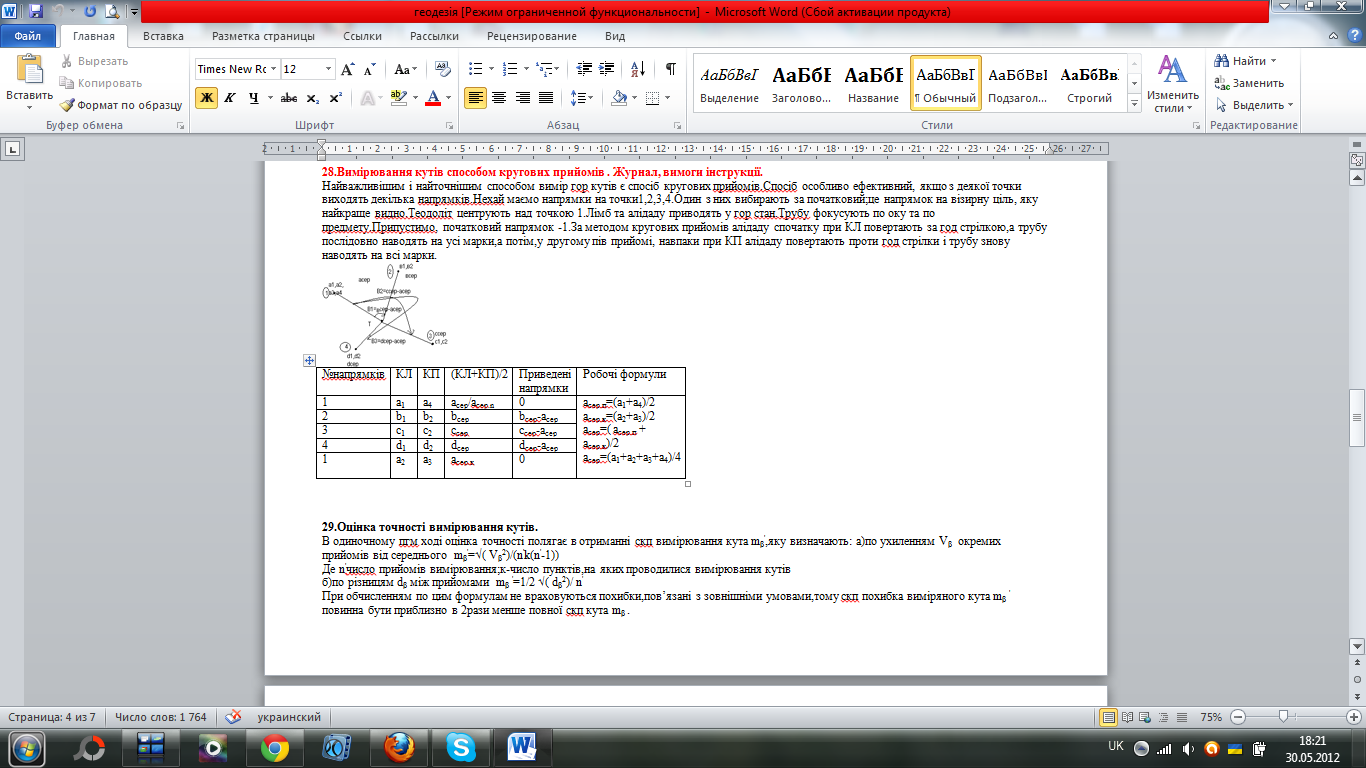
28.Вимірювання кутів способом кругових прийомів. Журнал, вимоги інструкції.
Найважливішим і найточнішим способом вимір гор кутів є спосіб кругових прийомів.Спосіб особливо ефективний, якщо з деякої точки виходять декілька напрямків.Нехай маємо напрямки на точки1,2,3,4.Один з них вибирають за початковий;це напрямок на візирну ціль, яку найкраще видно.Теодоліт центрують над точкою 1.Лімб та алідаду приводять у гор стан.Трубу фокусують по оку та по предмету.Припустимо, початковий напрямок -1.За методом кругових прийомів алідаду спочатку при КЛ повертають за год стрілкою,а трубу послідовно наводять на усі марки,а потім,у другому пів прийомі, навпаки при КП алідаду повертають проти год стрілки і трубу знову наводять на всі марки.
29.Оцінка точності вимірювання кутів.
В одиночному пгм ході оцінка точності полягає в отриманні скп вимірювання кута mβ',яку визначають: а)по ухиленням Vβ окремих прийомів від середнього mβ'=√(Vβ2)/(n'k(n'-1))
Де n'число прийомів вимірювання;к-число пунктів,на яких проводилися вимірювання кутів
б)по різницям dβ між прийомами mβ '=1/2 √(dβ2)/ n'
При обчисленням по цим формулам не враховуються похибки,пов’язані з зовнішніми умовами,тому скп похибка виміряного кута mβ ' повинна бути приблизно в 2рази менше повної скп кута mβ .
30.Джерела похибок при вимірюванні кутів.
Як відомо, похибки кутових вимірювань викликають поперечні зсуви в п/м ходах. Ці зсуви познач u.Джерелами похибок вимірювання гор кутів є:
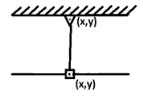
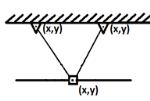
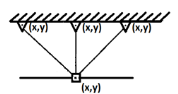
1.Редукція візирної цілі (uр)-неточне встановлення візирної марки над геодезичним пунктом.
2.Центрування теодоліта (uц)-неточне встановлення центра лімба над вершиною кута, що вимір.
3.Інструментальні похибки (uі),тобто похибки викликані недоліками приладу,з якими виконують вимір кута.
4.Зовнішнє середовище (uз).До них належать похибки, викликані неоднорідністю за густиною атмосфери, в якій проходить промінь світла від візирної цілі до приладу, неабсолютна прозорість атмосфери, коливання зображення візирної цілі,викликана турбулентністю атмосфери.
5.Вимірювання кута (uв.к)тобто вплив дій,які виникають під час вимірювання кута, а саме:похибки наведення труби на візирну вісь (марку) та похибки відліків кругів.
6.Вихідні данні (uвих).Під час математичного опрацювання кутових вимірів використовуються відомі, наперед задані величини.Це координати пунктів та дир. Кути напрямків.
Як коорд, так і обчисленні за ними дир. кути містять певні похибки.То ці похибки виражені поки що в лінійній мірі і є випадковими, можна записати:
u 2= uр2 +uц2+ uі2+ uз2+ uвл2+ uвих2 (1)
Приймаючи,що всі ці похибки за величинами однаково впливають на кутові виміри,матимемо: uр= uц= uі= uз=…=m
Запишемо: u=м*√6 (2)
Як відомо, допустимо відносна похибка поперечного зсуву ходу завдовжки L виражається формулою: u/ L=1/(T*√2) (Для пгм4классу T=25000)(3)
Враховуючи формули (2)і(3) запишемо так: (м*√6)/ L=1/(T*√2) (4)
Відносну допустиму похибку на окреме джерело похибок одержимо, розділивши (4) на√6, тобто: m/ L=1/(T*√2*√6)=1/(T*√12) або m/ L=1/(3,5T) (5)
Для ходу з параметрами L=10км, T=25000, T*√12=86600отримаємо за формулою (5)
m =12см
Отже, окреме джерело похибок повинно викликати похибку в положенні кінцевої точки такого ходу не більше за12см.У кутовій мірі dα''це становитиме: 0,12м/10000м= dα''/ρ''
dα''=(0.12*206265)/10000=2.5''
Ці прості розрахунки вже вказують на те, що похибка в положенні кінцевої точки ходу, викликана окремим джерелом похибок, не повинна перевищувати 2.5''
31.Розрахунок точності вимірювання кутів (Δβ'=P/T√n+3)
Δц/L=Δ/L√2=fs/ L√2=1/ T√2
Замінимо середні квадратичні на граничні
Δ'β/ L= Δц/ L= Δр/ L=…= ΔU/L√6=1/T√12=1/35T= Δβ'/ L
Розрахунок точності вимірювання кутів.
mu=(mβ/ρ)L√(n+3)/12 -> mβ= (mu/L)*ρ√12/(n+3)
Переходимо до граничних похибок
Δβ= ρ (ΔU/L) √12/(n+3)= ρ (1/T√12) √12/(n+3)= (ρ√6)/ T√n+3
Δβ'= Δβ/√6= ρ/ T√n+3 T√n+3
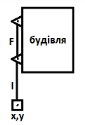
32.Похибка за центрування та зовнішні умови при вимірюванні кутів.
Припустимо,що під час вимір кута теодолітом встановлена поза центром знакау,тобто в точці А,а не в точці Д.Тоді буде вимір кут А,а не кут Д.Нехай тА переміщається по колу радіуса е́΄.Розглянемо трик АМВ та ДМС.Кути в точці М в них однакові.Тому кути Д+β=А+α (1)або
Д-А=α-β=z (2)
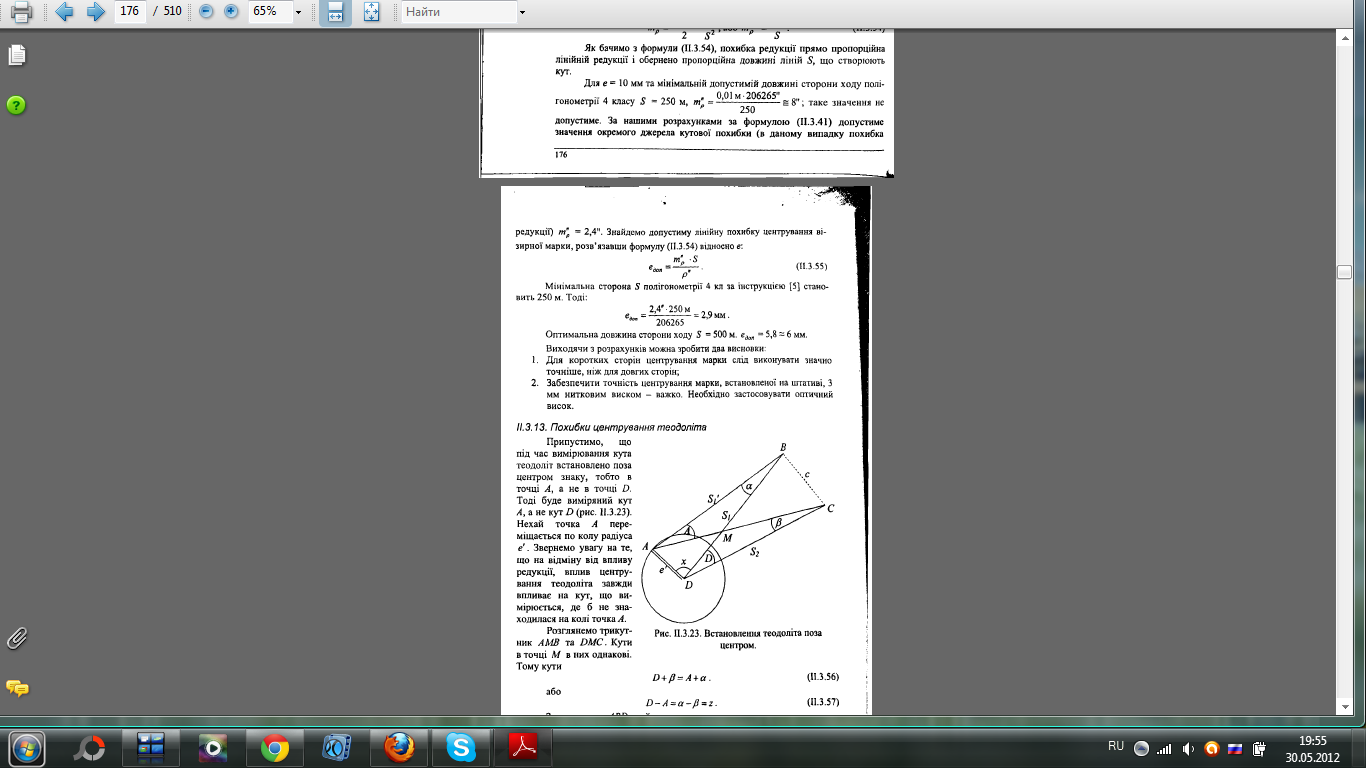
З трик АВД знайдемо sinα\e’=sinx\S’1 (3)
Оскільки кут α малий і S’1΄= S’1,тоді запишемо
α’’=e’*⍴’’sin(z+D)/S2 (4)
У свою чергу з трик АСД знах 𝛽’’=(e’⍴’’sin(x+D))/S2 (5)
Якщо тА також переміщається по колу радіуса е’ з інтервалами dx,то кількість встановлень теодоліт буде n=2П/dx, томі для кожного положення тА,враховуючи (2) можемо запис m2ц=mz2=mα2+m2𝛽 (6)
За аналогію з похибкою редукції запишемо в розгорнутому вигляді m2ц=( (⍴’’2*е’2)/2П)0∫2п[sin2x/S12+(sin2(x+D))/ S22]dx (7)
Після інтегрування та деяких перетворень матимемо: m2ц= ((е’2*⍴’’2)/2 S12* S22)*с2 (8)
Де с-віддаль між точками А і С
Для гострих кутів А=Д,значення с мале.Для витягнутого ходу А=Д=180, с= S1+ S2. Якщо S1=S2= S,тодіс= 2S,а с2=4 S 2.У цьому випадку (8) набуде вигяду: m2ц= ((е’2*⍴’’2)/2 S4* S22)*4 S2. Поставимо вимогу,щоб mц= mр
⍴’’*(е’/S)*√2=⍴’’ *(е/S)
33.Похибка за редукцію при вимірюванні кутів.
Припустимо, що у напрямку АВ візирна марка встановлена не в точці В (не над центром геодезичного знака), а помилково в точці В'.Лінійна величина редукції-е.Кутова похибка редукції-малий кут α.Сторони S1 і S1' трикутника АВВ' практично рівні.З цього Δ, оскільки <α малий, можемо записати: α''=ρ''(esin/ S1) (1)
Точки В', рухаючись по колу радіуса е, може займати різні положення.Кут х буде змінюватися разом з <α''.Для х=0۫ та х=180۫, α''=0.Для х=90۫ та х=270۫ α''набуває максимального значення. Нехай точка переміщається з постійними кутами dx;тоді n-кількість положень В' знайдемо за такою формулою: n=2π/ dx (2)
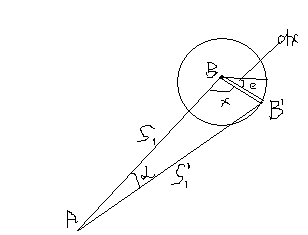
Кожному положенню точки В' буде відповідати похибкам редукції в деякому напрямку і. Квадрат скп редукції в напрямку і становитиме: mα12=[(ρ''2e2sin2x)/S12]2/(2π/ dx) (3) або mα12=[(ρ2*е2)/(S12*2π)] 0∫2nsin2xdx (4)
Можна довести, що інтеграл 0∫2nsin2xdx= π.Тому формула (4)набуде вигляду: mα12=(ρ2*е2)/(2 S12) (5)
Для другого напрямку кута з вершиною в точці А(для довжини S2)похибка:
mα22=(ρ2*е2)/(2 S22) (6)
Сумарна скп редукції: mρ2= mα12 +mα22={(ρ2*е2)2}[1/ S12+1/ S22] (7)
Для S1= S2= S матимемо: mρ2={(ρ2*е2)/2}*(2/S2), або mρ''=(ρ''e)/S (8)
Як бачимо с (8), похибка редукції прямо пропорційна до лінійної редукції і обернено пропорційна до довжини лінії S, що створ кут.
На підставі розрахунків можна зробити два висновки:
1)Для коротких сторін центрування марки необхідно виконувати значно точніше ніж для довгих сторін.
2)Забезпечити точність центрування марки, встановленої на штативі, 3мм нитковим виском-важко. Необхідно застосувати оптичний висок
35. Похибки особистого вимірювання кута.
Похибки особистого вимірювання кута поділяється: на помилки візування і помилки відліку за допомогою відлікового пристосування.
1. помилка візування. Ця помилка характеризує ту точність з якою поєднуються зображення перетину ниток сітки і точки спостережуваної візирної мети.
Гранична помилка візування дорівнює кутовій межі дозволу ока або як його ще називають найменьшему точці зору ока, озброєного трубою ∆=δмін/Г або ∆=60//Г
Середня квадратична помилка візування визначатиметься по формулі м=∆/√3=60/Г√3, 
2. помилка відліку залежить від особистих помилок, відлікової одиниці та відстані. 
Date: 2015-09-19; view: 2419; Нарушение авторских прав