Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Канал измерения скорости бортового радиолокатора
|
|
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
КАФЕДРА 401

А.А СОСНОВСКИЙ
РАДИОЛОКАЦИОННЫЕ И РАДИОНАВИГАЦИОННЫЕ
ИЗМЕРИТЕЛИ СКОРОСТИ
Учебное пособие к курсовому проектированию
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ.. 2
1. КАНАЛ ИЗМЕРЕНИЯ СКОРОСТИ БОРТОВОГО РАДИОЛОКАТОРА.. 3
1.1. Выбор структурных схем.. 4
1.2. Расчет параметров антенной системы. 7
1.3. Расчет параметров сигналов и помех. 7
1.4. Выбор параметров устройств обработки сигналов. 9
1.5. Расчет погрешностей. 9
1.6. Расчет энергетических параметров. 12
1.7. Расчет вспомогательных параметров. 14
2. АКТИВНЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ.. 15
2.1. Выбор структурных схем.. 15
2.2. Расчет длины волны и параметров ФАР НРЛ.. 17
2.3. Расчет параметров сигнала. 17
2.4. Выбор параметров устройств обработки сигналов. 18
2.5. Расчет погрешностей. 19
2.6. Расчет энергетических параметров. 19
2.7. Расчет вспомогательных параметров. 20
3. ДОПЛЕРОВСКИЕ ИЗМЕРИТЕЛИ СКОРОСТИ.. 21
3.1 Выбор структуры ДИС.. 21
Mx. 23
3.2. Определение параметров полета и отражающей поверхности. 26
3.3. Расчет параметров антенной системы.. 28
3.4. Расчет параметров преобразованного сигнала. 29
3.5 Выбор параметров фильтров. 31
3.6. Расчет погрешностей. 32
3.7. Расчет энергетических параметров. 33
3.8. Особенности расчета ДИС ЧМ... 34
3.9. Расчет вспомогательных параметров. 35
ПРИЛОЖЕНИЕ П 1. ФОРМА ПРЕДСТАВЛЕНИЯ ТЕХНИЧЕСКИХ ТРЕБОВАНИЙ В ПОЯСНИТЕЛЬНОЙ ЗАПИСКЕ.. 37
ПРИЛОЖЕНИЕ П 2. ТИПОВЫЕ ЗАДАНИЯ НА ПРОЕКТИРОВАНИЕ.. 39
ЛИТЕРАТУРА.. 43
ПРЕДИСЛОВИЕ
В пособии излагается методика расчета параметров измерительных радиотехнических устройств (РТУ), предназначенных для определения скорости летательных аппаратов (ЛА).
В трех главах пособия даны основные сведения, необходимые при проектировании измерителей скорости, используемых как в составе радиолокаторов, так и в качестве автономного средства. Расположение материала пособия соответствует рекомендуемому порядку расчета определенного РТУ. Пример представления результатов проектирования в виде разработанных на основе расчетов и исходных данных технических требований к элементам РТУ приведен в Приложении П 1. В Приложении П 2 даны типовые задания на проектирование.
Пособие базируется на основной литературный источник [1], рекомендуемый при изучении дисциплин “Основы теории радиолокационных и радионавигационных систем” и “Радиолокационные и радионавигационные системы”, сохранена, в основном, и система обозначений, принятая в [1], только в целях упрощения опущен индекс “v” при обозначении величин, относящихся к измерителям скорости. С этой же целью обозначение s сохранено для флуктуационных и суммарных погрешностей, причем индекс “фл” также опускается, а методические флуктуационные погрешности обозначаются как sмт. Кроме того для обозначения ширины диаграммы направленности антенны (ДНА) по половинной мощности вместо j0,5 используется j.
Рекомендуемые в пособии расчетные соотношения даются без выводов. При необходимости читатель может воспользоваться ссылками на источники, в которых имеются соответствующие выкладки.
КАНАЛ ИЗМЕРЕНИЯ СКОРОСТИ БОРТОВОГО РАДИОЛОКАТОРА
Рассматриваемый канал представляет собой одну из составных частей радиолокатора (РЛ), предназначенного для установки на самолет истребитель. Этот РЛ, кроме измерения радиальной скорости цели, должен в процессе автоматического сопровождения цели определять ее угловые координаты и дальность. Типовое задание по проектированию канала скорости бортового РЛ (КП-21) приведено в приложении П 2.
Предполагается, что целью является один из военных самолетов, параметры которых в разных режимах полета приведены в табл. 1.1. Предельные возможности самолетов реализуются в так называемом максимальном режиме. Наиболее экономичным является крейсерский режим полета. Маловысотный полет (МВП) применяется при преодолении самолетом зон противовоздушной обороны противника. Этим режимам соответствуют индексы “max”, “кр” и “мвп” при величинах, характеризующих данный режим. В табл. 1.1 приняты следующие обозначения: S - дальность полета; V – воздушная (без учета скорости ветра) скорость полета; a и J – первая и вторая производные от скорости полета по времени. Для получения необходимых для расчетов значений V, выраженных в м/с, можно воспользоваться соотношением
1 м/с=3,6 км/ч. (1.1)
Таблица 1.1
Основные параметры самолетов
| Условные обозначения | Тип самолета | Режим полета | ||||||||
| Максимальный | Крейсерский | МВП | ||||||||
| Smax км | Hmax км | Vmax*) км/ч | a м/с2 | J=da/dt м/c3 | Sкр км | Vкр*) км/ч | SМВП км | VМВП*) км/ч | ||
| Ш Р Б-1 Б-2 П-1 П-2 | Штурмовик Разведчик Бомбардировщик Бомбардировщик Перехватчик Перехватчик | 18,5 18,3 | - - - | - | - |
Типовой профиль полета военных самолетов (кроме высотных разведывательных) показан на рис. 1.1.
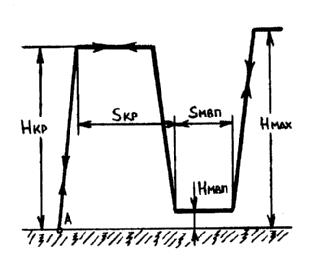
Рис. 1.1
Для упрощения считается, что атака цели производится на встречном курсе, когда истребитель сближается с целью, находящейся впереди и летящей ему навстречу. Радиолокатор должен быть рассчитан на перехват цели в наиболее неблагоприятных условиях, когда истребитель находится выше цели, совершающей маловысотный полет, и РЛ наблюдает ее на фоне земной поверхности. Подобная ситуация показана на рис. 1.2, а (БЛ – боковые лепестки ДНА) ([1], с. 130). На рис. 1.2, б изображен спектр помехи, создаваемой отражениями от земной поверхности при непрерывном и немодулированном зондирующем сигнале, а на рис. 1.2, в – спектр такой помехи при импульсном сигнале и положение одной из спектральных составляющих отраженного от цели сигнала в свободной от помех частотной области. Здесь доплеровский сдвиг несущей частоты f0 отраженного от цели сигнала равен
 , (1.2)
, (1.2)
а доплеровский сдвиг частоты f0 отраженного от поверхности сигнала (в направлении оси ДНА) будет
 , (1.3)
, (1.3)
где l - длина волны зондирующего сигнала, V и VЦ – скорость полета носителя РЛ (истребителя) и цели, а b - угол визирования цели в вертикальной плоскости. Предельные значения этого угла можно найти из соотношений
 . (1.4)
. (1.4)
Рис. 1.2
Определение доплеровских сдвигов частоты с помощью (1.2) и (1.3) предполагает, что V=VГ, где VГ – горизонтальная скорость полета, т.е. считается, что вертикальная составляющая скорости отсутствует, а угол сноса ЛА близок или равен нулю.
Date: 2015-07-23; view: 528; Нарушение авторских прав