Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Лист 1
|
|
Курсовой проект посвящен изучению (вытяжного пресса, долбежного станка или др. У каждого своя установка).
Курсовой проект выполняется на 2-х листах.
Цели 1-го листа включают 2 задачи:
1) Динамический синтез машинного агрегата.
2) Динамический анализ машинного агрегата.
1- Динамический синтез машинного агрегата включает в себя определение постоянной составляющей приведенного момента инерции по заданному коэффициенту неравномерности вращения входного вала машины, который обеспечивает заданную неравномерность кривошипа, а также расчет момента инерции добавочной массы(Маховика)
2- Динамический анализ машинного агрегата включает в себя определение угловой скорости и углового ускорения звена приведения, с учетом уже определенной постоянной составляющей приведенного момента инерции.
Обе задачи решаются графическим методом с использованием метода Мерцалова. Расчеты выполняются в режиме установившегося движения за один оборот (цикл) звена приведения (кривошипа).
Первоначально строим 12 планов положений механизма в выбранном масштабе. За начало построения выбираем крайнее положение звена 5, соответствующее началу холостого хода.
Для каждого плана положений механизма строим план аналогов скоростей в выбранном масштабе.
По построенным планам аналогов скоростей определяем передаточные функции звеньев и аналоги скоростей центра тяжести звена 3 (или 4 у кого-то).
Для выполнения динамического анализа выбираем динамическую модель машины, представляющую звено приведения(кривошип)., которое имеет такие же динамические характеристики Мп и Iп как и главный вал машины – кривошип 1.
В нашем случае динамической моделью и звеном приведения является кривошип 1.
Углубленно(необязательно):
Наиболее простой динамической моделью машинного агрегата может быть одномассовая модель, представленная на рис 2.2.
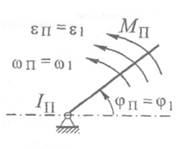
На рис изображено звено приведения(кривошип 1)
В качестве такой модели рассматривается условное вращающееся звено – звено приведения, которое имеет момент инерции IП относительно оси вращения (приведённый момент инерции) и находится под действием момента сил МП (приведённого момента сил). В свою очередь.
 ,
,
где  - приведённый момент движущих сил;
- приведённый момент движущих сил;
 - приведённый момент сил сопротивления.
- приведённый момент сил сопротивления.
Кроме того,  ,
,
где  - постоянная составляющая приведённого момента инерции;
- постоянная составляющая приведённого момента инерции;
 - переменная составляющая приведённого момента инерции.
- переменная составляющая приведённого момента инерции.
В величину входят собственный момент инерции кривошипа ( ), приведённые моменты инерции ротора электродвигателя и передаточного механизма (
), приведённые моменты инерции ротора электродвигателя и передаточного механизма ( ), а также момент инерции
), а также момент инерции  добавочной массы (маховика), причём необходимость установки маховика определяется на основании заданной степени неравномерности движения звена приведения.
добавочной массы (маховика), причём необходимость установки маховика определяется на основании заданной степени неравномерности движения звена приведения.
------ -------------------------------------------------------------------------------------------------------------------
Для определения сначала находим значение силы  во всех положениях, После чего из равенства мгновенных мощностей ____________________________________________________________ __________ (
во всех положениях, После чего из равенства мгновенных мощностей ____________________________________________________________ __________ ( - у каждого свое уравнения и находится вначале пункта 3.3.2) р ассчитываем значения момента во всех положениях и строим график
- у каждого свое уравнения и находится вначале пункта 3.3.2) р ассчитываем значения момента во всех положениях и строим график  .
.
Для определения  используем условие, что за цикл установившегося движения работа движущих сил равна работе сил сопротивления. Поэтому применяя численное интегрирование графика
используем условие, что за цикл установившегося движения работа движущих сил равна работе сил сопротивления. Поэтому применяя численное интегрирование графика  определяем работу сил сопротивления для всех 13 положений и строим график работы сил сопротивления.
определяем работу сил сопротивления для всех 13 положений и строим график работы сил сопротивления.
Потом строим график работы движущих сил, соединяя прямой линией точки 1 и 13 графика работ сил сопротивления. Т. к. постоянен по величине – проводим его на графике моментов в виде прямой линии.
Далее определяем изменение кинетической энергии машины, равной разности работ движущих сил и работ сил сопротивления, изображенных на графиках работ  и . Если принять масштаб изменения кинетической энергии
и . Если принять масштаб изменения кинетической энергии  равным масштабу изменения работ
равным масштабу изменения работ  , то ординаты графика найдем как расстояние между графиками и . По значениям таких ординат строится график зависимости
, то ординаты графика найдем как расстояние между графиками и . По значениям таких ординат строится график зависимости  .
.
Далее строим график изменения переменной составляющей приведенного момента инерции  .
.
Для его построения по формулам в записке просчитываем момент инерции, приведенный к звену приведения для всех звеньев, обладающих массой, в каждом положении. Затем суммируем посчитанные моменты инерции в каждом положении и получаем значения  . Все полученные значения в каждом положении делим на масштабный коэффициент
. Все полученные значения в каждом положении делим на масштабный коэффициент  и получаем ординаты, по которым строим график .
и получаем ординаты, по которым строим график .
Затем вычитаем из кинетическую энергию звеньев с переменным моментом инерции. и получаем график изменения кинетической энергии  звеньев с постоянным приведенным моментом инерции
звеньев с постоянным приведенным моментом инерции  .
.
К графику проводим 2 горизонтальные касательные и по расстоянию ab между ними определяем постоянную состовляющую приведенного момента инерции по формуле:

 - заданный коэффициент неравномерности.
- заданный коэффициент неравномерности.
По вычесленной величине  находим необходимую величину момента инерции добавочной массы(маховика)
находим необходимую величину момента инерции добавочной массы(маховика)  , устанавливаемой на вал кривошипа(звена 1).
, устанавливаемой на вал кривошипа(звена 1).
Полученный график также является графиком угловой скорости  . В исходных данных дана средняя угловая скорость. Изображаем среднюю угловую скорость на графике в виде горизонтальной прямой линии, проходящей посередине между касательными a и b. Тогда, чтоб найти угловую скорость в любом положении, нужно к средней угловой скорости прибавить (или отнять) расстояние от средней линии до точки графика . Прибавляем, если точка графика находится выше средней линии, отнимаем, если точка графика ниже средней линии.
. В исходных данных дана средняя угловая скорость. Изображаем среднюю угловую скорость на графике в виде горизонтальной прямой линии, проходящей посередине между касательными a и b. Тогда, чтоб найти угловую скорость в любом положении, нужно к средней угловой скорости прибавить (или отнять) расстояние от средней линии до точки графика . Прибавляем, если точка графика находится выше средней линии, отнимаем, если точка графика ниже средней линии.
Используя все выше найденные значения рассчитываем угловое ускорение  .
.
Date: 2015-07-10; view: 325; Нарушение авторских прав