Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Структурный и алгоритмический синтез несвязанной системы управления многомерным объектом
|
|
 Структурный синтез заключается в выборе структуры системы регулирования каждой выходной переменной. Выбираем одноконтурную замкнутую систему автоматической стабилизации по каждой входной переменной.
Структурный синтез заключается в выборе структуры системы регулирования каждой выходной переменной. Выбираем одноконтурную замкнутую систему автоматической стабилизации по каждой входной переменной.
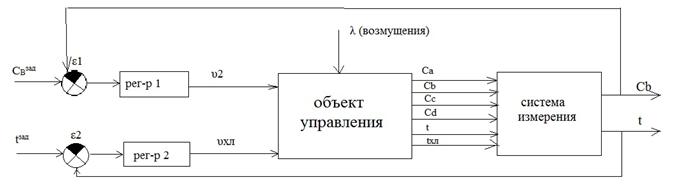
Рис.2.1. Функциональная структурная схема регулирования
 - концентрация компонента В на входе с заданным значением
- концентрация компонента В на входе с заданным значением
 - оптимальная температура объекта с заданным значением на входе
- оптимальная температура объекта с заданным значением на входе
 – ошибка регулирования
– ошибка регулирования
 - ошибка регулирования
- ошибка регулирования
 - расход второго потока в реактор
- расход второго потока в реактор
 - расход хладоагента
- расход хладоагента
 – подаваемые возмущения
– подаваемые возмущения
 – концентрация компонента А на выходе из аппарата
– концентрация компонента А на выходе из аппарата
 - концентрация компонента B на выходе из аппарата
- концентрация компонента B на выходе из аппарата
 - концентрация компонента C на выходе из аппарата
- концентрация компонента C на выходе из аппарата
 концентрация компонента D на выходе из аппарата
концентрация компонента D на выходе из аппарата
 - оптимальная температура объекта на выходе из аппарата
- оптимальная температура объекта на выходе из аппарата
 – температура хладоагента на выходе из аппарата
– температура хладоагента на выходе из аппарата
Алгоритмический синтез заключается в разработке математической модели элементов, входящих в систему управления. В нашем случае математическая модель объекта представляет собой в форме нелинейных ОДУ.
Следовательно, необходимо выбрать какой-либо типовой закон регулирования. Учитывая динамические свойства объекта (отсутствие запаздывания) выбираем ПИ-закон регулирования.
ПИ-закон обладает следующими положительными свойствами:
· Обеспечивает минимальную статическую ошибку регулирования.
· Достаточно прост в настройке, т.к. настраиваются только два параметра, а именно коэффициент усиления Кр и постоянная времени интегрирования Ti. В таком регуляторе имеется возможность оптимизации величины отношения Кр/Тi→min, что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования.
· Малая чувствительность к шумам в канале измерения (в отличие от ПИД-регулятора)
 2 = KP1
2 = KP1  (
( 1 +
1 + 
1 = - 
Преобразуем уравнение к удобному виду для моделирования на ЭВМ. Для этого уравнения для работы регулятора необходимо преобразовать в дифференциальную форму:
 = KP1
= KP1  +
+ 

= KP1  + ( -
+ ( - 
= - KP1  + ( -
+ ( -
Следовательно, второе уравнение имеет вид:
 = - KP2
= - KP2  +
+  (
( -
- 
В программе необходимо к системе уравнений объекта добавить два уравнения для регуляторов.
Выражения для  ,
,  берем из уравнения математической модели объекта управления.
берем из уравнения математической модели объекта управления.
Date: 2015-07-17; view: 423; Нарушение авторских прав