Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
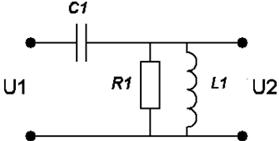
Пример выполнения контрольной работы № 2
|
|





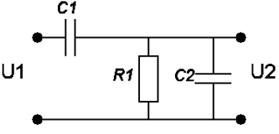
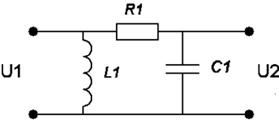
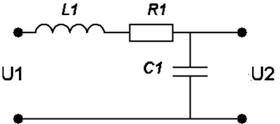
1. Получим поэлементное описание, которое включает компонентные и топологические уравнения.
Компонентными уравнениями для элементов R,C,Lявляются следующие уравнения:
 r (1)
r (1)
 (2)
(2)
 (3)
(3)
Составим топологические уравнения:
Так как все элементы соединены последовательно, можно записать
ir = i c= il (4)
Напряжение на входе U2
 (5)
(5)
Напряжение на выходе U2
 (6)
(6)
2. Получим вход-выходное описание – математическую модель, связывающую входной сигнал U1 и выходной сигнал U2.
Перепишем уравнение (5) c учетом уравнения (1)

Продифференцируем данное уравнение по t, получим:
 (7)
(7)
 заменим с учетом уравнения (2) на
заменим с учетом уравнения (2) на 
 заменим с учетом уравнений (4), (3) и (6)
заменим с учетом уравнений (4), (3) и (6)

 (8)
(8)
Тогда уравнение 7 перепишем в виде:
Для того чтобы избавиться от тока ic продифференцируем уравнение еще раз:
 (9)
(9)
с учетом уравнения (8)  уравнение (9) примет вид:
уравнение (9) примет вид:
 - вход-выходное описание в форме дифференциального уравнения.
- вход-выходное описание в форме дифференциального уравнения.
В операторной форме:

3. Получим передаточную функцию используя уравнение в операторной форме.
 - передаточная функция ЭКУ (10)
- передаточная функция ЭКУ (10)
4. Получим математическую модель в пространстве состояний.
Введем вектор переменных состояний:


Получим выражения для  ,
,  , зависящие от х1, х2 и входного сигнала U(t).
, зависящие от х1, х2 и входного сигнала U(t).
Для этого используем формулу (5) для напряжений по контуру:
Выразим Ur, Uc, Ul через переменные состояния х1, х2

х2 R + x1 + L  = U1
= U1
Выразим :
 =
= 
Уравнение (2) с учетом переменных состояния примет вид:

Из уравнений (5) и (6) с учетом переменных состояний получим уравнение выхода:
В матричном виде модель в пространстве состояний примет вид:

 - уравнение динамики (11)
- уравнение динамики (11)
 - уравнение выхода (12)
- уравнение выхода (12)
5.Оценим устойчивость, управляемость, наблюдаемость ЭКУ.
Выберем значения R=10 кОм, L=250 мГн, C=1 мкФ и подставим их в выражение (10) для передаточной функции:
 (13)
(13)
Для расчетов используем MatLab.
Введем полином знаменателя:
» p=[250 10 1]
p =
250 10 1
Для оценки устойчивости вычислим корни характеристического уравнения:
» rt=roots(p)
rt =
-0.0200 + 0.0600i
-0.0200 - 0.0600i
Вещественные части корней характеристического уравнения имеют отрицательные знаки, следовательно, система устойчива.
Для оценки управляемости используем модель в пространстве состояний. Построим матрицу управляемости R:
R=[B A*B]
Вводим матрицу А
» a=[0 1/1;-1/250 -1/(250*10)]
Вводим матрицу В
» b=[0;1/250]
Вычисляем матрицу R:
» r=[b a*b ]
Определяем ранг матрицы:
» rg=rank(r)
rg = 2
Ранг матрицы R равен n, следовательно система управляема.
Для оценки наблюдаемости системы, построим матрицу наблюдаемости Q:
Q=[CT AT* CT]
Построим транспонированную матрицу А:
» at=a'
Вводим матрицу С:
» c=[-1 -10]
Построим транспонированную матрицу С:
» ct=c'
Вычисляем матрицу наблюдаемости Q:
» q=[ct at*ct ]
Определяем ранг матрицы:
» rg=rank(q)
rg = 2
Ранг матрицы Q равен n, следовательно, система наблюдаема.
 6. Построим граф системы:
6. Построим граф системы:
-10



 -1
-1

















Рис. 12. Граф системы
Граф системы построим по полученной модели в пространстве состояний (11), (12):
7. Построим графики АЧХ, ФЧХ, годограф АФЧХ, переходную характеристику.
Введем передаточную функцию (13):
» w=tf([250 0 0],[250 10 1])
Transfer function:
250 s^2
------------------
250 s^2 + 10 s + 1
Графики АЧХ и ФЧХ строятся по введенной передаточной функции командой bode.
>> bode(w)
Рис. 13. Частотные характеристики ЛФЧХ и ЛАЧХ
График АФЧХ строится по передаточной функции командой nyquist.
>> nyquist(w)

Рис. 14. АФЧХ
Построим переходную характеристику ЭКУ с помощью команды step:
» step(w)
Рис. 15. Переходная характеристика h(t)
По переходной характеристике определим время переходного процесса – 135с.
8. Заключение: таким образом, исследуемая система оказалась устойчивой, управляемой, наблюдаемой, время переходного процесса составляет 135 с.
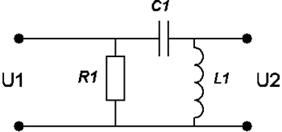
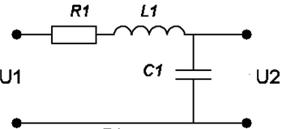
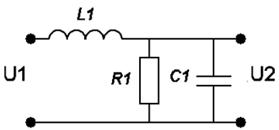
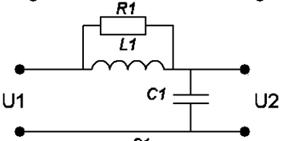
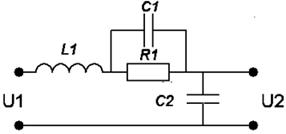
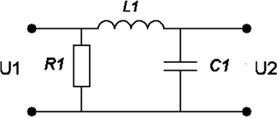
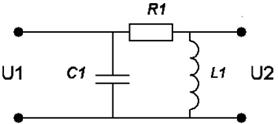
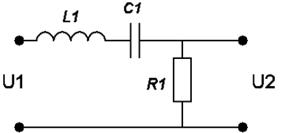
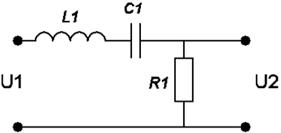
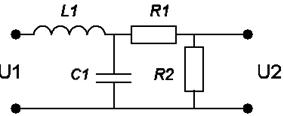
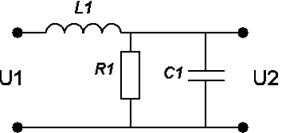
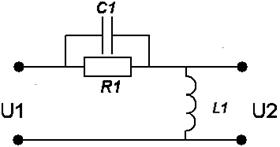
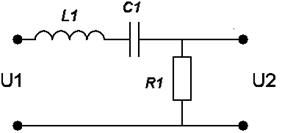
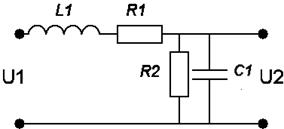
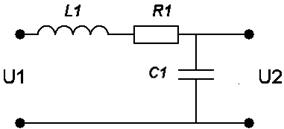
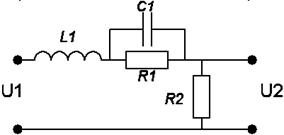
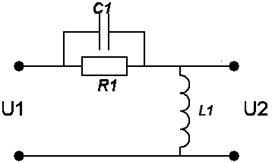
Варианты заданий:
| № вари-анта | Схема | № вари-анта | Схема |
| 
| ||

| 
| ||
| 
| ||
| 
| ||
| 
| ||
| 
| ||
| 
| ||
| 
| ||
| 
| ||
| 
| ||
| 
|
Литература
1. Асанов А.З. Моделирование и анализ динамических систем. – Набережные Челны: Изд-во КамПИ, 2003. – 152с.
2. Асанов А.З. Цифровое моделирование и анализ динамических систем. Лабораторный практикум. - Набережные Челны: Изд-во КамПИ, 2004. – 105с.
3. Ахмадеев И.А. Теория автоматического управления. Использование системы MATLAB для исследования систем автоматического управления. Лабораторный практикум.- Набережные Челны: Изд-во КамПИ, 2002. – 46с.
Содержание
1. Краткие теоретические сведения............................................................................................ 3
2. Контрольная работа № 1......................................................................................................... 15
3. Контрольная работа № 2......................................................................................................... 25
Литература................................................................................................................................... 33
| <== предыдущая | | | следующая ==> |
| Как упражнения продлевают жизнь | | | Анкета участника рейтинга научной активности студентов юридического факультета КФУ за 2014 год |
Date: 2015-07-17; view: 504; Нарушение авторских прав