Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Общая характеристика асинхронных электродвигателей с короткозамкнутым ротором
|
|
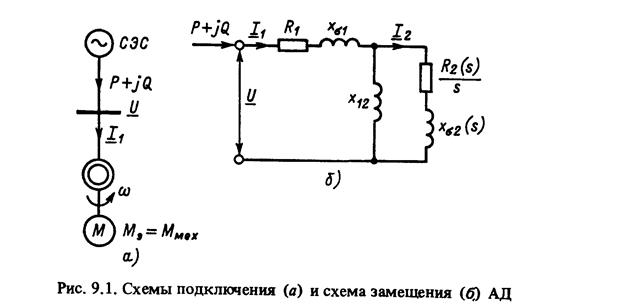
Основными параметрами режима АД являются (рис. 9.1, а); активная Р и реактивная Q мощности, потребляемые АД из электрической сети; ток статорной обмотки I1; электромагнитный момент на валу АД Мэ, равный в установившемся режиме моменту сопротивления механизма М мех; частота вращения со и скольжение ротора

где wс — синхронная частота вращения ротора.
Схема замещения представлена на рис. 9.1, б, на которой: R1, хs1 — активное сопротивление и индуктивное сопротивление рассеяния статорной обмотки и R2, хs2 — обмотки ротора; x1 2 — индуктивное сопротивление взаимоиндукции между обмотками статора и ротора.
В схемах замещения АД необходимо учитывать эффект вытеснения тока в обмотке ротора, который равносилен изменению сопротивлений R2 и xs2 этой обмотки. Степень вытеснения тока определяется частотой наводимых в обмотке токов, которая определяется скольжением. Изменение сопротивлений обмотки ротора отображается зависимостями
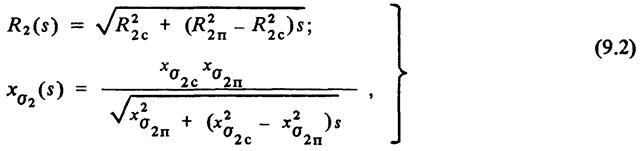
где R2с, хs2с — сопротивления, соответствующие синхронному (s = 0) жиму, R2п, хs2п - пусковому режиму (S = 1).
Эффект вытеснения тока в обмотках ротора приводит к увеличению активного сопротивления (до R 2п) и уменьшению индуктивного сопротивления рассеяния (до Xs2п) обмоток ротора в начальный период пуска АД (s = 1), что проявляется в увеличении пускового тока и пускового электромагнитного момента. Отношение активных сопротивлений KR = R2п / R2c зависит от глубины пазов на роторе и для реальных АД изменяется в пределах от KR = 1 до KR = 3,5. Отношение индуктивных сопротивлений Кx = Xs2c / Xs2п изменяется в пределах 1—2. Соотношение между коэффициентами:

Асинхронный двигатель характеризуется каталожными данными: номинальной мощностью на валу двигателя Р ном, кВт; номинальным междуфазным напряжением обмотки статора U ном, кВ; коэффициентом полезного действия двигателя в номинальном режиме hном; коэффициентом мощности в номинальном режиме cosjном; скольжением в номинальном режиме shоm; пусковым током Iп в долях номинального тока статорной обмотки I 1ном; пусковым Мп и максимальным Мmax электромагнитным моментами в долях номинального Мном.
Параметры схемы замещения и режима принято представлять в относительных единицах. За базисные единицы принимают номинальную полную мощность АД SНОМ, номинальное напряжение Uном, номинальный ток статорной обмотки

Эту систему относительных единиц АД назовем основной. Исключение из основной системы относительных единиц делают для электромагнитного момента, который выгодно выражать в долях номинального момента M HOM.
Основные параметры режима АД могут быть представлены через параметры схемы замещения, скольжение и напряжение на выводах по соотношениям:
активная мощность, потребляемая из сети,

реактивная мощность, потребляемая из сети,

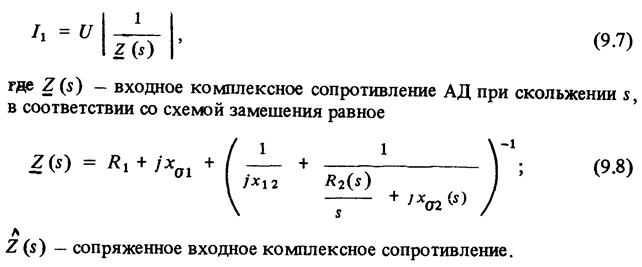
ток статорной обмотки
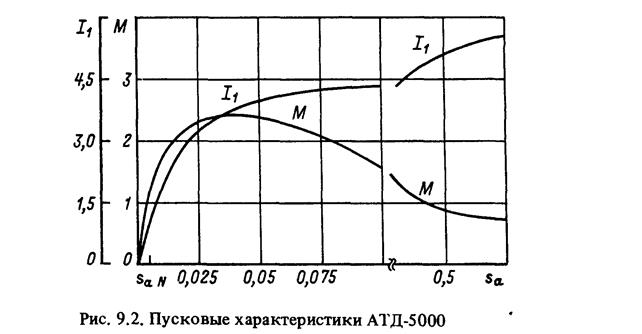
Зависимости активной и реактивной мощностей, тока статорной обмотки и электромагнитного момента АД от скольжения при номинальном напряжении называются пусковыми характеристиками. В качестве примера на рис. 9.2 приведены пусковые характеристики для АД типа АТД-5000.
Основными расчетными параметрами АД являются также синхронное индуктивное сопротивление

и сверхпереходное индуктивное сопротивление

Активное сопротивление статорной обмотки можно определить исходя из потерь мощностей в этой обмотке в номинальном режиме, которые составляют относительно устойчивую долю (в среднем 0,3) общих потерь активной мощности в номинальном режиме:

Используя соотношения (9.5)-(9.8), для определения остальных параметров схемы замещения АД можно составить систему уравнений, выражающих параметры режима, соответствующие каталожным данным. В каждом из уравнений следует выделить доминирующий параметр АД и преобразовать уравнения относительно доминирующих параметров к виду, удобному для расчетов.
Активное сопротивление роторной обмотки в пусковом режиме

где разность между каталожным и расчетным значениями пускового момента

Сверхпереходное сопротивление АД в пусковом режиме

где DIП = IП - IП1. Сопротивление х”П не является параметром схемы замещения АД, поэтому уравнение следует дополнить соотношением, выражающим один из параметров схемы замещения через сопротивление х”П
Активное сопротивление роторной обмотки в синхронном режиме
Сопротивление Хс не является параметром схемы замещения АД, поэтому уравнение следует дополнить соотношением, выражающим один из параметров схемы замещения через сопротивление Хс.
Сверхпереходное сопротивление X"к, соответствующее критическому скольжению sк,

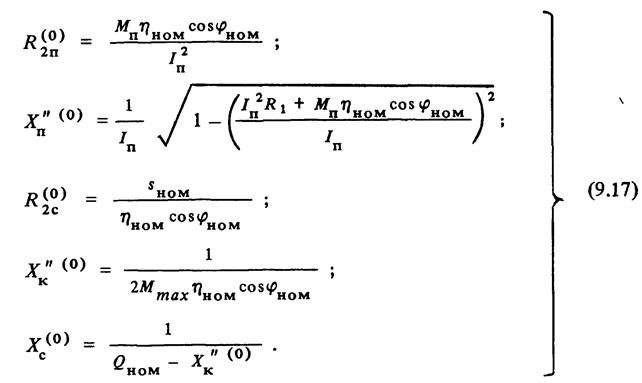
Система уравнений (9.12) — (9.16) представлена в виде, удобном для организации расчетов по методу последовательных приближений. За начальные приближения доминирующих параметров могут приниматься значения, определяемые выражениями, полученными на основе прибли-
женных соотношений, характеризующих АД:
Дополним систему уравнений соотношениями, выражающими индуктивные сопротивления схемы замещения Xsl, Xl2, Xs2П, Xs2с через расчетные параметры xп", хс, xk".
Отношение индуктивных сопротивлений рассеяния обмотки ротора в синхронном и пусковом режимах Кx = Хs2с/Хs2П выражается через отношение активных сопротивлений этой обмотки KR = R 2п/ R 2c в соответствии с уравнением

Индуктивное сопротивление рассеяния роторной обмотки при произвольном скольжении s Xs2(s) = x12(X”(s) — Xsl)/(Xc - X" (s)). Из уравнений, определяемого отношением индуктивных сопротивлений Хs2к при критическом скольжении и xs2п при скольжении s = 1, следует

где коэффициент а выражается через уже определенные параметры:

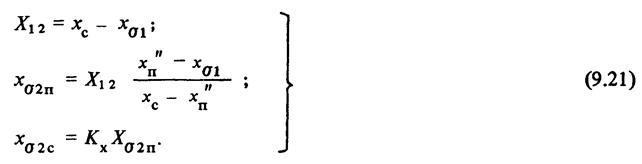
Остальные параметры схемы замещения АД определяются соотношениями
Уравнения (9.12) —(9.21) определяют параметры схемы замещения и расчетные параметры АД через каталожные данные. Расчет осуществляется в следующей последовательности. По выражениям (9.17) определяются начальные приближения доминирующих параметров, по выражениям (9.10)-(9.20) — начальные приближения остальных параметров схемы замещения АД. Затем определяются расчетные параметры режима и приближение доминирующих параметров. Расчеты по методу последовательных приближений продолжаются до тех пор, пока не будет выполнено условие

где Î — заданная точность расчетов по методу последовательных приближений. Опыт расчетов по изложенному алгоритму свидетельствует, что сходимость процесса расчетов при Î = 0,001 достигается за четыре—семь итераций.
Date: 2015-06-11; view: 1097; Нарушение авторских прав