Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Электромагнитный момент идеальной асинхронной машины
|
|
|
dt и,какследуетиз(1.109),момент
 сопротивления М с уравновешиваетсяэлектромагнитныммоментом М эм,которыйразвивает машина. Электромагнитный момент определяется несколькими способами.
сопротивления М с уравновешиваетсяэлектромагнитныммоментом М эм,которыйразвивает машина. Электромагнитный момент определяется несколькими способами.
Электромагнитный момент можно найти, если известна механическая мощность:
 M эм = P 2¢ wp.
M эм = P 2¢ wp.
(3.75)

|
|
M эм
= P эм w,
(3.76)
|
. При w = 2 × p × f
p M эм
= p × P эм
Так как из (3.70) и (3.71)

|
= m × (I ¢)2× r ¢
s, то
 M = m 1 × p × (I ¢)2 × r 2¢.
M = m 1 × p × (I ¢)2 × r 2¢.
эм 1 2 2


|
|
c
(3.77)
Из (3.3), (3.4) электромагнитный момент идеальной электрической машины, в которой нет высших гармоник, определяется как произведение токов:
 M = m M (is × ir - is × ir)
M = m M (is × ir - is × ir)
(3.78)
эм 2
b a a a
Заменяя произведения токов и взаимной индуктивности в (3.78)
потокосцеплениями,
M эм определяем через произведения потокосцеплений и
токов. Электромагнитный момент можно найти также через изменение энергии магнитного поля в воздушном зазоре машины:
 M = dW
M = dW
(3.79)
,
эм dg
где W — энергия магнитного поля в воздушном зазоре; g — угол поворота ротора
относительно статора, соответствующий электрическому углу
a = p × g
dW =
B 0 dV,

(3.80)
где
B — индукция в элементе объема dV.
зазора V
B 2
= 2 × p × R × ld × d 0

|
V 0
dV.
(3.81)
Рассмотренные выше выражения (3.75) — (3.81) для определения электромагнитного момента дают интегральное значение момента. При проектировании электрических машин необходимо знать распределение усилий по поверхности ротора и статора машины.
На рисунке 3.34 представлен элемент короткозамкнутого ротора асинхронной машины. Поверхностная плотность токового слоя

 A = I 2× N 2×,
A = I 2× N 2×,
 2 2 × p × R
2 2 × p × R
(3.82)
где
I 2 = I 2 max ×
— ток в стержне обмотки ротора; N 2 — число стержней на

|
|
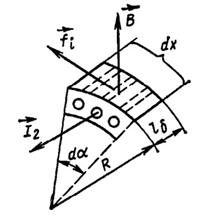
Рисунок 3.34 К определению сил, действующих на ротор
Ток в роторе и плотность токового слоя, как и индукция, распределяются по гармоническому закону (рисунок 3.35, а):
æ x ö
æ x ö

|
è 1
p ÷÷;
ø
A 2 = A 2 m × sinçç

|
p - y ÷÷.

Рисунок 3.35 Распределение электромагнитных сил по длине полюсного деления
На проводник с током, находящийся в магнитном поле с индукцией В, действует сила, Н/м,
fx = Bx × Ax × ld.
Токовый слой в поле В на всей поверхности ротора создаст момент
2 t 1
(3.83)
M эм
= R ò
f x dx,
(3.84)
где R — радиус ротора (см. рисунок 3.34). Подставляяв (3.83) значения А 2 и В и считая, что
dx = Rda, получаем
2 t 1
æ x ö
æ x ö
M эм
= R × ld
ò Bm × sinçç t
p ÷÷ × A 2 m × sinçç t
p - y ÷÷ dx =

2 t 1
è 1 ø
æ x ö
è 1 ø
 æ x ö
æ x ö
= R 2
× ld
ò Bm
× sinçç

|
|
p ÷÷ × A 2 m
ø
× sinçç

|
p - y ÷÷ da =
(3.85)
|
Bm
A 2 m
× 2 p 2
cos(y
) = p × R 2 × l
Bm
A 2 m
cos(y
2).
Так как
Ф = 2 × B × l × t, a
 m p m d 1
m p m d 1
t = 2 p × R и

Bm =
Ф × p
 m, получим среднее
m, получим среднее
× l × R
2 d
значение электромагнитного момента
× ld
× Bm × A 2 m × cos(y 2) =
|
Фm× p
I 2× N 2×

 cos(y) =
cos(y) =
2 × ld × R
2 × p × R 2
(3.86)

|
cos(y
2),
Фm и ЭДС Е 2,а также между ЭДС и МДС и током в
обмотке ротора
I 2.
Среднеезначениесилыпригармоническомраспределении В и I 2
F ср
1 2 p
|
2 m × ld
× sin(a) sin(a - y
2) da =
(3.87)
 = 1 B × I
= 1 B × I
× l × cos(y),
2 m 2 m d 2
где
Bm,
I 2 m
— амплитудные значения индукции в воздушном зазоре и тока в
роторе.
Электромагнитные силы и электромагнитный момент по поверхности ротора распределены неравномерно и изменяют направление (рисунок 3.35, б).
|
В практических расчетах широко применяется выражение для расчета полученное из Г-образной схемы замещения (см. рисунок 3.20):
M эм,
U 1.

(3.88)

r 2÷
+ (x
+ C x ¢)2
1 1 2
Так как
P э2 = P эм × s = wc × M эм × s то

 M = m 1 × p × (I ¢)2 × r 2¢.
M = m 1 × p × (I ¢)2 × r 2¢.
|
|
c
Подставляя значение тока
I 2¢, для двухполюсной машины получаем

 M = s
M = s
|
|
|
|
r 2¢ ö
 ÷
÷
+ (x
ù
+ C x ¢)2 ú
(3.89)
ëè s ø
1 1 2
û
Рассматривается идеальная машина, поэтому можно, пренебрегая механическими потерями,считать,что М эм равен М — моменту на валу машины.
 По (3.89) построена механическая характеристика асинхронной машины M = f (s) при U 1 и f 1=const(рисунок3.36).Механическаяхарактеристикатакжепредставляетсобой зависимость частоты вращения ротора от момента n = f (М) или наоборот М = f (n).
По (3.89) построена механическая характеристика асинхронной машины M = f (s) при U 1 и f 1=const(рисунок3.36).Механическаяхарактеристикатакжепредставляетсобой зависимость частоты вращения ротора от момента n = f (М) или наоборот М = f (n).
Рисунок 3.36 Механическая характеристика асинхронной машины M = f (s) Подставляя в (3.89) различные значения s, можно получить зависимость M = f (s) для
всех режимов работы асинхронной машины. Согласно (3.89) М =0 при s=0 и
s = ±¥
. Из (3.89) следует, что момент имеет максимум при
s = ± sk, т. е. при критическом
скольжении. При увеличении скольжения от 0 до
± sk
момент растет, а затем
уменьшается. При этом ток
I 2¢ продолжает расти, но растет реактивная
составляющая, а активная уменьшается. За счет увеличения тока
ЭДС и поток машины.
I 1 уменьшается
Считая параметры постоянными, можно определить экстремумы, приравняв
 dM эм = 0.
dM эм = 0.
ds
При этом критическое скольжение
s k = ±
C 1 × r 2¢.
(3.90)
 r 2 + (x
r 2 + (x
+ C x ¢)2
1 1 1 2
Подставляя значение sk
в (3.89), определяем максимальный момент для
многополюсной машины:

p × m 1× U 1
. (3.91)
2 × w
× C × (± r +
r 2 + (x
+ C x ¢)2)
c 1 1 1
1 1 2
Знак «+» перед (3.91) и генераторному режимам.
r 1 относится к двигательному, а знак «—» — к
Для асинхронных двигателей единых серий и асинхронных машин большой
мощности можно считать, что
r 1 = 0 и тогда
s k = ±
C 1 × r 2¢,
 x + C x ¢
x + C x ¢
(3.92)
(1 1 2)
а максимальный момент
M = ±
p × m 1 × U 1.
(3.93)
max
× w × C ×
x + C x ¢

1 2)
Максимальный момент пропорционален квадрату напряжения и обратно
пропорционален
r ¢
xk = x 1 + x 2¢. В (3.91) и (3.93) можно положить
C 1= 1 и считать,
s k = ±.
 xk
xk
При
r 1 = 0 и C 1 = 1 выражение для максимального момента имеет вид
M max
= ± p × m 1× U 1.

|
(3.94)
× w × x
Как следует из (3.91), максимальный момент в генераторном режиме М maxг
несколько больше, чем в двигательном М maxд. Это объясняется тем, что в
генераторном режиме
r 1 принимается со знаком «-» и знаменатель (3.91) меньше
знаменателя в (3.91) для двигательного режима. Активное сопротивление ротора
определяет
s k (3.92),и чем больше
r 2¢ тем больше s k
смещается в область больших
скольжений. Кратность максимального момента
kM = M max
M ном= 1,7 - 3,0.
 Болеевысокие значения kM
Болеевысокие значения kM
полюсов.
принадлежат двигателям с меньшим числом пар
На рисунке 3.37 представлены зависимости момента от скольжения при изменении
активногосопротивленияротораи U 1 и f 1=const.Приизменении
r 2¢ максимальный
момент не изменяется, и при увеличении
r 2¢ максимум момента смещается в
область больших скольжений. Увеличить активное сопротивление обмотки ротора можно путем подключения добавочного резистора к фазной вторичной обмотке.

Рисунок 3.37 Зависимость момента от скольжения при различных активных сопротивлениях ротора
Установившееся значение пускового момента соответствует s =1. Из (3.89) пусковой момент
m × U 2 × r ¢
M п = w
× ((r
+ C r ¢)2 + (x
+ C x
)2)
(3.95)
|

c 1 1 2 1 1 2
r ¢. Смещая
M max
за счет увеличения
r 2¢ можно получить
M max
= M п. Это имеет место
согласно (3.93) и (3.95) при

|
r 2 + (x
+ C x ¢)2.
(3.96)
1 1 1 2
В большинстве электроприводов желательно иметь пусковой момент близким к максимальному. Это обеспечивает механическая характеристика с повышенным сопротивлением в цепи ротора (кривая 1 на рисунок 3.38). Однако в номинальном режиме при такой механической характеристике двигатель будет работать при большом скольжении, что связано с большими габаритами, потерями и низкими энергетическими показателями. Поэтому асинхронные двигатели с механической характеристикой 1 используются редко. Двигатели единых серий имеют механическую характеристику 2, обеспечивающую высокие энергетические показатели,когда s ном=l-4%.
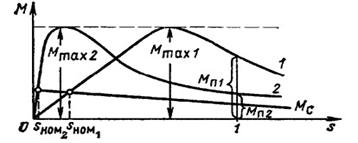
Рисунок 3.37 Механические характеристики асинхронного двигателя
Из анализа механических характеристик 1 и 2 следует, что наиболее благоприятной механической характеристикой была бы характеристика, сочетающая свойства характеристик 1 при пуске и 2 в номинальном режиме. Переход от характеристики
1 к характеристике 2 в асинхронных двигателях с фазным ротором достигается путем включения в обмотку ротора при пуске резистора и закорачивании обмотки ротора при работе в номинальном режиме. Двигатели с фазным ротором более дорогие и выпускаются для электроприводов с тяжелыми условиями пуска. В двигателях с короткозамкнутым ротором улучшенные пусковые характеристики получаются за счет применения пазов специального профиля, в которых
происходит нелинейное изменение
r 2¢ при вытеснении тока в пазах.
Выражение (3.89) для определения механической характеристики громоздкое и для упрощенных расчетов неудобное. М. Клоссом была предложена простая формула для описания механической характеристики
M = 2
M max
s + sk sk s
(3.97)
По формуле Клосса характеристика M = f (s) может быть построена с погрешностью 10—15 %, если для каких-либо двух режимов работы известны М и s. Этими двумя режимами могут быть номинальный режим и режим пуска, данные которых приводятся в каталогах.
Для устойчивой работы асинхронного двигателя и производственного механизма необходимо определенное сочетание механических характеристик двигателя М (n) и нагрузки М с(n).Двигательустойчивоработает,когда

 dM < dM c
dM < dM c
dn dn
(3.98)
Этому условию соответствует точка 1 на рисунке 3.38. После возмущения система возвращаетсяв исходное положение, так как при увеличении частоты вращения М с растет быстрее, чем момент двигателя М, и система возвращается в точку 1. При уменьшении n,наоборот, М с уменьшаетсябыстрее,чеммоментдвигателя,и система снова возвращается в точку 1.

Рисунок 3.38 К определению устойчивой работы двигателя Неустойчивый режим работы имеет место в точке 2, в которой
 dM > dM c
dM > dM c
dn dn
(3.99)
Для устойчивой работы двигателя важное значение имеет перегрузочная способность двигателя. При колебаниях напряжения сети и момента нагрузки двигатель продолжает работать, если имеется запас статической устойчивости,
определяемый коэффициентом перегрузочной способности двигателях общепромышленного применения равен 1,7—2,2.
Билет 3
Date: 2016-07-22; view: 693; Нарушение авторских прав