Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Линеаризация статической характеристики преобразователя
|
|
Исходные данные
Таблица 1
Исходные данные
| № варианта | Тип двигателя | 
| 
| 
| 
| 
| 
| 
| 
| 
| 
| Желаемый показатель качества переходного процесса |
| Д32 | 9,5 | 0,425 | 0,28 | 0,5 | 0,02 | 0,006 | Перерегулирование 5…10% при отработке задающего воздействия |

Рисунок 1. Функциональная схема контура регулирования тока якоря
Где UZ – тиристорный преобразователь, AQ – блок ограничения, AJ – регулятор тока, UA – датчик тока, RS – шунт, LM – обмотка возбуждения.

Рисунок 2. Структурная схема контура регулирования тока якоря
2 Расчёт параметров цепи якоря
Суммарная индуктивность якорной цепи:

Электромагнитная постоянная времени якорной цепи:

Кратность тока короткого замыкания:

Номинальный момент двигателя:

Скорость холостого хода двигателя:

Механическая постоянная времени:

Так как  отбрасываем обратную связь якорной цепи.
отбрасываем обратную связь якорной цепи.
Линеаризация статической характеристики преобразователя
Таблица 2
Статическая характеристика преобразователя

| 0,05 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,1 | 1,2 | ||

| 0,02 | 0,035 | 0,085 | 0,17 | 0,28 | 0,42 | 0,55 | 0,69 | 0,8 | 0,89 | 0,94 | 0,98 |
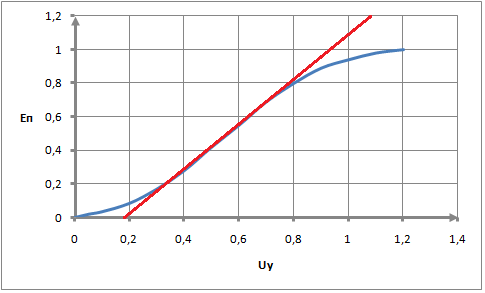
Рисунок 3. Линеаризация статической характеристики преобразователя
Линеаризуем, т.е. приведём к виду 

Также заменяем  , так как выполняется
, так как выполняется  , где
, где  – постоянная времени запаздывания.
– постоянная времени запаздывания.
4 Расчёт граничных параметров регуляторов тока
Произведя подстановку рассчитанных звеньев получим следующую структурную схему контура регулирования тока якоря

4.1 Передаточная функция схемы контура регулирования тока якоря (для П регулятора тока):
Для П регулятора делаем замену 

Для П регулятора определим граничное значение коэффициента усиления K, для этого воспользуемся критерием устойчивости Гурвица:
Характеристический полином замкнутой системы:


Так как система имеет третий порядок, то она будет находиться на границе устойчивости при следующем условии:

Откуда 
Проверяем:


Рисунок 4. Переходный процесс с граничным K
4.2 Передаточная функция схемы контура регулирования тока якоря (для И регулятора тока):
Для И регулятора делаем замену 

Для И регулятора определим граничное значение постоянной времени T, для этого воспользуемся критерием устойчивости Гурвица:
Характеристический полином замкнутой системы:


Так как система имеет четвертый порядок, то она будет находиться на границе устойчивости при следующем условии:

Откуда 
Проверяем:

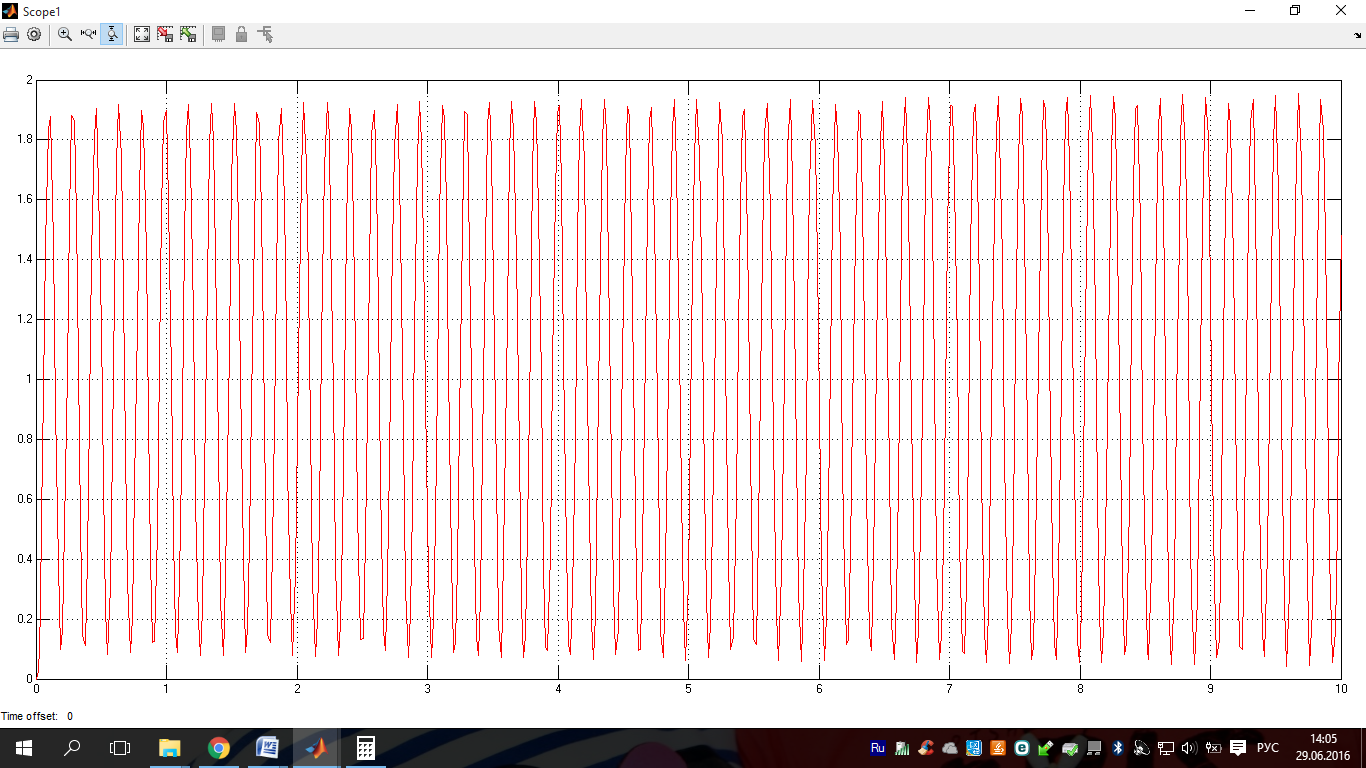
Рисунок 5. Переходный процесс с граничным T
4.3 Передаточная функция схемы контура регулирования тока якоря (для ПИ регулятора тока):
Для ПИ регулятора делаем замену 

Характеристический полином замкнутой САУ:

Для ПИ регулятора определим граничное значение постоянной времени T и коэффициента усиления K, для этого воспользуемся критерием устойчивости Гурвица:
границы области устойчивости будут при следующих уравнениях:


Коэффициенты получившегося характеристического полинома:


Откуда:



Рисунок 6. Область допустимых значений K и Т
5 Определение параметров регуляторов, обеспечивающих заданный показатель качества (по варианту – перерегулирование 5…10% при отработке задающего воздействия)
Date: 2016-07-18; view: 415; Нарушение авторских прав