Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Скорость передачи и длина сети
|
|
Диапазон скоростей
Все узлы в сети должны работать с одной скоростью. Стандарт CAN не определяет скоростей работы, но большинство как отдельных, так и встроенных в микроконтроллеры адаптеров позволяют плавно менять скорость в диапазоне по крайней мере от 20 килобит в секунду до 1 мегабита в секунду. Существуют решения, выходящие далеко за рамки данного диапазона.
Предельная длина сети
Приведённые выше методы контроля ошибок требуют, чтобы изменение бита при передаче успело распространиться по всей сети к моменту замера значения. Это ставит максимальную длину сети в обратную зависимость от скорости передачи: чем больше скорость, тем меньше длина. Например, для сети стандарта ISO 11898 предельные длины составляют приблизительно:
· 1 Мбит/с 40 м
· 500 Кбит/с 100 м
· 125 Кбит/с 500 м
· 10 Кбит/с 5000 м
Протоколы высокого уровня
Базовой спецификации CAN недостаёт многих возможностей, требуемых в реальных системах: передачи данных длиннее 8 байт, автоматического распределения идентификаторов между узлами, единообразного управления устройствами различных типов и производителей. Поэтому вскоре после появления CAN на рынке начали разрабатываться протоколы высокого уровня для него. В число распространённых на данный момент протоколов входят:
· CANopen
· DeviceNet
· CAN Kingdom
· J1939
· SDS
Преимущества
· Возможность работы в режиме жёсткого реального времени.
· Простота реализации и минимальные затраты на использование.
· Высокая устойчивость к помехам.
· Арбитраж доступа к сети без потерь пропускной способности.
· Надёжный контроль ошибок передачи и приёма.
· Широкий диапазон скоростей работы.
· Большое распространение технологии, наличие широкого ассортимента продуктов от различных поставщиков.
Недостатки
· Максимальная длина сети обратно пропорциональна скорости передачи.
· Большой размер служебных данных в пакете (по отношению к полезным данным).
· Отсутствие единого общепринятого стандарта на протокол высокого уровня, однако же, это и достоинство. Стандарт сети предоставляет широкие возможности для практически безошибочной передачи данных между узлами, оставляя разработчику возможность вложить в этот стандарт всё, что туда сможет поместиться. В этом отношении CAN подобен простому электрическому проводу. Туда можно «затолкать» любой поток информации, который сможет выдержать пропускная способность шины. Известны примеры передачи звука и изображения по шине CAN (Россия). Известен случай создания системы аварийной связи вдоль автодороги длиной несколько десятков километров (Германия). (В первом случае нужна была большая скорость передачи и небольшая длина линии, во втором случае — наоборот). Изготовители, как правило, не афишируют, как именно они используют полезные байты в пакете.
Источники:
https://ru.wikipedia.org/wiki/Controller_Area_Network
Что такое CAN-BUS
CAN Bus - это автомобильная шина разработанная Робертом Бошем, которая преимущественно принята в автомобильной и авиакосмической индустрии. CAN это серийный протокл шины, с подключением отдельных систем и датчиков как альтернатива обычному много-проводному пучку. Позволяет связать автомобильные компоненты в один или двойной провод называемый сетью шины данных на скорости выше 1 Мегабита.
До CAN - шины
С начала 1940 года, автопроизводители непрерывно улучшали технологии своих автомобилей путем интеграции и наращиванием электронных компонентов. Технологический прогрессивный автомобиль становились более составными так как электронные компоненты заменяли механические системы и создавалий дополнительный комфорт, удобство, и характеристики безопасности. Вверх до того как была выпушенна CAN шина, автомобили имели большое количество проводки которая была необходима для соединения различных электронных компонентов.

В соответствии с болшим количеством проводов, установка требовала установщика не только понимать как интегрировать системы и связсть с друг другом, но так же требовала многочисленных соединений пролегающих по всей длинне автомобиля. Тем самым ухудшая обслуживание и ремонт, автомобильная проводка отличается по годам, маркам и даже моделям. В результате установщикам необходимо иметь хорошие знания и затрачивать много времени для установки не оригинального оборудования или обучения установке затрачивая многочисленное время, и потеря времени на выявление неисправностей а иногда даже претензии по повреждению оригинального оборудования. В течении данного прогресса, установщики сталкивались с наращиваемыми сложностями временем поиска квалифицированного персонала который был готов выполнять каждый день установки и как результат, рост цены за компенсацию за более квалифицированную работу, в других случаях даже отказ клиента.

Введение CAN Bus
Первый автомобиль с шиной CAN был представлен в 1986 году - это BMW 850 купе. За счет использование данной шины в автомобиле было использовано меньше проводки на 2 километра, общий сброшенный вес составил 50 кг, использовались так же только половинчатые соединители. Впервые, каждый из автомобильных систем и датчиков где способность соединения на очень высокой скорости (25КБ/c - 1Мегабит) на одинарном или сдвоенном проводе линии соединения противоположенная предидущей мультипроводной проводке. Как бы то нибыло введение CAN шины так же увеличивает степень интеграции автомобилей и делает установку не оригинального оборудования еще сложнее и в большенстве случаев невозможных для выполнения.

В 2006, более 70% проданных автомобилей на технологии CAN Bus. С начала 2008, Ассациация Автомобильных Инжинеров (SAE) потребовала 100% для продаваемых автомобилей в USA использоватьпротокол соединения CAN Bus Евро союз имеет аналогичные законы. Малому количеству производителей не оригинального оборудования были предоставлены возможности работать с протоколом CAN Bus до сегодняшнего дня, не имеется новых устройств которы могли бы позволять не оригинальным сигнализация запускать двигатель в обход штатной сигнализации. Но в данный момент есть устройство которое позволяет включить автозапуск не отключая штатную сигнализацию в CAN Bus сети.

The ССL первый набор не оригинального обходчика CAN Bus предлагается для автозапуска и сигнализации для новой высокоскоростного протокола соединения CAN Bus.
Источник:
http://www.buyitx.net/index.php?whatis_can_ru
Пункт 2.2 Розрахунок показників надійності електрообладнання
Розрахунок показників надійності провадиться по методиках, застосовуваним у техніці, зокрема, на автомобільному і залізничному транспорті.
Для підвищення точності розрахунків потрібно знати закони розподілу випадкових величин (наробіток на відмовлення, імовірність безвідмовної роботи і т.п.). Для технічної експлуатації найбільш характерні наступні закони розподілу: нормальний, розподіл Вейбулла-Гнеденко, логарифмічний нормальний і експонентний.
Нормальний закон розподілу формується тоді, коли на протікання досліджуваного процесу і його результат впливає порівняно велике число незалежних (чи слабко залежних) елементарних факторів (доданків), кожний з який окремо робить лише незначну дію в порівнянні із сумарним впливом всіх інших, наприклад, періодичність.
Закон розподілу Вейбулла-Гнеденко виявляється в моделі так називаного “слабкої ланки”. Якщо система складається з групи незалежних елементів, чи відмовлення несправність кожного з який приводить до відмовлення всієї системи, то імовірність її безвідмовної роботи визначається граничним розподілом для крайніх членів послідовності взаємонезалежних величин.
Нормальний логарифмічний закон розподілу може зустрічатися, якщо на протіканні досліджуваного процесу і його результат впливає порівняно велике число випадкових і взаємонезалежних факторів, інтенсивність дії яких залежить від досягнутого випадковою величиною стану.
Експонентний закон розподілу є однопараметричним, що спрощує розрахунки. При експонентному законі розподілу імовірність безвідмовної роботи не залежить від того, скільки виробів проробило спочатку експлуатації, а визначається конкретною тривалістю розглянутого чи періоду пробігу. Таким чином, розглянута модель не враховує поступової зміни параметрів технічного стану, наприклад, у результаті зношування, старіння і т.д.
Вважаючи, що у вихідних даних проекту дана кількість раптових відмовлень, необхідно визначити наступні показники надійності: параметри потоку відмовлень, середній наробіток на відмовлення, імовірність безвідмовної роботи, коефіцієнт технічної готовності.
Параметри потоку відмовлень свідчить про кількість відмовлень, що приходяться на одиницю пробігу. Він дорівнює:
 (2.11)
(2.11)
Середній наробіток на відмовлення:
 (2.12)
(2.12)
Імовірність безвідмовної роботи:
- для окремих елементів рухомого складу:
 (2.13)
(2.13)
Для заданих вузлів будується залежність P=f(L) з використанням, наприклад таблиці 2.3.
Таблиця 2.3- Імовірність безвідмовної роботи окремих вузлів
| L | км | |||||||
| P | 0,867 | 0,751 | 0,651 | 0,565 | 0,490 | 0,424 | 0,368 |
У залежності від кількості відмовлень значення величин пробігів у таблиці 2.3 може бути змінене для одержання графіка на сторінці пояснювальної записки. Тому що для вузлів (агрегатів) РС МЕТ рівень безвідмовності нормований, то на графіку відзначається пробіг, при якому забезпечується імовірність безвідмовної роботи Р=0,85 (для вузлів, агрегатів руху, що забезпечують безпеку).
Наступним визначається комплексний показник надійності – коефіцієнт технічної готовності. Він дорівнює:
 (2.14)
(2.14)
Кількість машин, що знаходяться на ремонтах протягом доби, дорівнює сумі машин на капітальному, середньому, непланових (випадкових) ремонтах і ТЕ-2:

Кількість ремонтів у добу вже розраховувалося (див. табл. 2.2), а тривалість простою в ремонті – відповідно до прийнятої системи.

Приймаємо 6 одиниць.
Тоді Ктг дорівнює:

Пункт 2.7.1 Стенды
АКСМ-33300А — с транзисторной системой управления на IGBT-модулях и асинхронным двигателем переменного тока, оснащен автономным ходом на базе дизель-генератора Kirsh.
Новая модель 43303А
Правда таких оказалось нужным всего 2 шт. (одна в аргентинской Кордобе, другая в Бобруйске)
Чертеж троллейбуса модели 33300А (свиду обычный проллейбус)
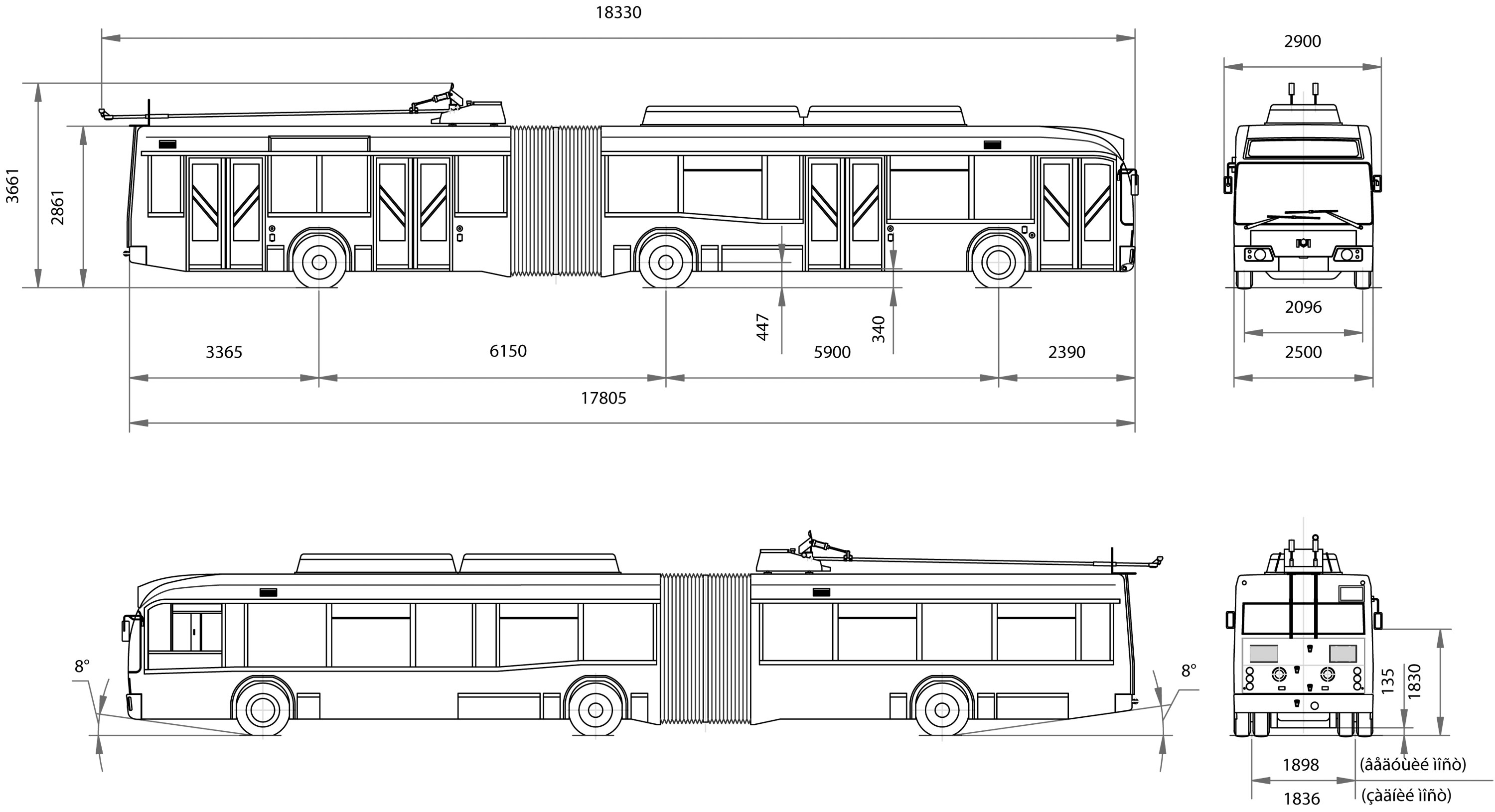
Пассажировместимость, человек 165
Количество мест для сидения 39
Тяговый электродвигатель: 8ML 3550 к/4
мощность, кВт 185
Дизель-генератор: APU 100 DIPME
мощность, кВт 100
Масса снаряженного троллейбуса, кг 18700
Максимальная техническая масса, кг 28000
Максимальная установившаяся скорость движения, км/ч 55
Date: 2016-05-23; view: 926; Нарушение авторских прав