Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Механизмы ограничения ошибок
|
|
Каждый контроллер CAN шины будет пытаться обнаружить описанные выше ошибки в каждом сообщении. Если ошибка обнаружится, нашедший её узел передаст флаг ошибки, таким образом разрушая передачу данных по шине. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если они ещё не обнаружили оригинальную ошибку) и предпримут соответствующее действие, т.е. сбросят текущее сообщение.
Каждый узел обслуживают два счетчика ошибок: счетчик ошибок передачи и счетчик ошибок приема. Существуют правила, описывающие условия повышения и/или понижения значений этих счетчиков. По существу, передатчик, обнаруживший сбой, повышает значение своего счетчика ошибок передачи быстрее, чем слушающие узлы повысят значения своих счетчиков ошибок приема. Это потому, что есть большая вероятность, что сбоит сам передатчик!
Узел начинает работу в режиме Error Active. Когда значение любого из двух счетчиков ошибок превысит 127, узел перейдет в состояние Error Passive, а когда значение счетчика ошибок передачи превысит 255, узел перейдёт в состояние Bus Off.
• Узел в режиме Error Active при обнаружении ошибки будет передавать флаги активной ошибки (Active Error Flags).
• Узел в режиме Error Passive при обнаружении ошибки будет передавать флаги пассивной ошибки (Passive Error Flags).
• Узел в режиме Bus Off не будет передавать ничего.
Правила повышения и понижения значений счетчиков ошибок довольно сложные, но принцип прост: ошибка передачи добавляет 8 пунктов, а ошибка прием – 1 пункт. Правильно переданные и/или принятые сообщения вызывают понижение значения счетчика(ов).
Пример (слегка упрощенный): Представим, что у узла A плохой день. Всякий раз, когда A пытается передать сообщение, происходит сбой (не важно, по какой причине). При каждом сбое значение счетчика ошибок передач увеличивается на 8 пунктов и передается флаг активной ошибки. Затем он пытается послать сообщение ещё раз.. и всё повторяется.
Когда значение счетчика ошибок передачи превысит 127 пунктов (т.е. после 16 попыток), узел A перейдёт в режим Error Passive. Разница в том, что теперь он будет передавать флаги пассивной ошибки. Флаг пассивной ошибки содержит 6 рецессивных битов и не будет нарушать передачу других данных по шине – поэтому другие узлы не услышат жалобы A на ошибки шины. Однако A продолжит повышать значение счетчика ошибок передачи. Когда он превысит 255 пунктов, узел A окончательно сдастся и перейдет в режим Bus Off.
Что другие узлы думают об узле A? – После каждого флага активной ошибки, переданного узлом A, остальные узлы повышают значения своих счетчиков пассивной ошибки на 1 пункт. За всё то время, что потребуется узлу A для перехода в режим Bus Off, значения счетчиков ошибок получения остальных узлов не превысят границы Error Passive, т.е. 127. Это значение будет уменьшаться на 1 пункт при каждом корректном получении сообщения. Однако узел А будет оставаться в режиме Bus Off.
Большинство контроллеров CAN будут предоставлять биты статуса (и соответствующие прерывания) для двух состояний:
• «Предупреждение об ошибке» (Error Warning) – значение одного или обеих счетчиков ошибок превысило 96 пунктов
• Bus Off, как описано выше.
Некотрые, но не все (!), контроллеры также предоставляют бит для состояния Error Passive. Немногие контроллеры также предоставляют прямой доступ к счетчикам ошибок.
Привычка контроллеров CAN автоматически переотправлять сообщения при возникновении ошибок иногда может раздражать. На рынке имеется как минимум один контроллер (SJA1000 от Philips), поддерживающий полное ручное управление обработкой ошибок.
Режимы сбоев шины
Стандарт ISO 11898 перечисляет несколько режимов сбоев кабеля шины CAN:
1.CAN_H прерван
2.CAN_L прерван
3.CAN_H короткозамкнутый на напряжение батаре
4.CAN_L короткозамкнутый на землю
5.CAN_H короткозамкнутый на землю
6.CAN_L короткозамкнутый на напряжение батареи
7.CAN_L короткозамкнутый на провод
8.CAN_H и CAN_L прерваны в одном и том же месте
9.Потеря соединения с оконечной нагрузкой сети
Для сбоев 1–6 и 9 «рекомендовано», чтобы шина сохраняла работоспособность путём снижения соотношения сигнал/шум (S/N), а в случае сбоя 8 – чтобы исходная подсистема сохранила работоспособность. Для сбоя 7 существует «опциональная» возможность сохранения работоспособности путём снижения соотношения сигнал/шум (S/N).
На практике система CAN, построенная на приемопередатчиках типа 82C250, не сохранит работоспособность при сбоях 1–7, а при сбоях 8–9 может как сохранить, так и не сохранить.
Существуют «устойчивые к сбоям» драйверы, такие как TJA1053, способные обрабатывать все сбои. Обычно за эту устойчивость приходится платить ограничением максимальной скорости; для TJA1053 она составляет 125 кбит/с.
ИСТОЧНИК:
http://www.micromax.ru/solution/theory-practice/articles/2161/
Система CAN (Комплект оборудования системы распределенного управления)
 Распределенная система управления троллейбусом (на CAN-интерфейсе).
Все электрооборудование городского электротранспорта соединено между собой многочисленными кабелями, скрытыми от наших глаз под обшивкой, стало серьезным тормозом для дальнейшего развития бортовой электроники.
Современное автомобилестроение, где насыщенность электроникой еще выше, давно столкнулось с этой проблемой. В середине 80-х годов появилось несколько решений этой задачи. Самой простой, надежной, недорогой, но при этом гибкой и помехоустойчивой оказалась система цифрового канала связи между всеми устройствами на CAN-интерфейсе. CAN применяется в большинстве Европейских легковых автомобилей. Производители грузовиков и внедорожников в дальнейшем планируют применять именно эту технологию.
CAN - это цифровая связь между узлами, использующая минимальное количество проводов при сохранении высокой надежности связи.
Нашим предприятием разработана и применяется распределенная система управления троллейбусом на CAN-интерфейсе.
На рис.1 показан стандартный распределительный шкаф троллейбуса 5275.05 "ОПТИМА" производства ЗАО "ТРОЛЗА", а на рис.2, тот же троллейбус, но с применением Распределенной Системы Управления. Данные троллейбусы поставляются в Новосибирск и ряд других городов. Применение нашей системы существенно сокращает трудоемкость монтажа, затраты на низковольтные кабели и жгуты, а так же упрощает и ускоряет процесс диагностики неполадок.
Рис.1
Распределенная система управления троллейбусом (на CAN-интерфейсе).
Все электрооборудование городского электротранспорта соединено между собой многочисленными кабелями, скрытыми от наших глаз под обшивкой, стало серьезным тормозом для дальнейшего развития бортовой электроники.
Современное автомобилестроение, где насыщенность электроникой еще выше, давно столкнулось с этой проблемой. В середине 80-х годов появилось несколько решений этой задачи. Самой простой, надежной, недорогой, но при этом гибкой и помехоустойчивой оказалась система цифрового канала связи между всеми устройствами на CAN-интерфейсе. CAN применяется в большинстве Европейских легковых автомобилей. Производители грузовиков и внедорожников в дальнейшем планируют применять именно эту технологию.
CAN - это цифровая связь между узлами, использующая минимальное количество проводов при сохранении высокой надежности связи.
Нашим предприятием разработана и применяется распределенная система управления троллейбусом на CAN-интерфейсе.
На рис.1 показан стандартный распределительный шкаф троллейбуса 5275.05 "ОПТИМА" производства ЗАО "ТРОЛЗА", а на рис.2, тот же троллейбус, но с применением Распределенной Системы Управления. Данные троллейбусы поставляются в Новосибирск и ряд других городов. Применение нашей системы существенно сокращает трудоемкость монтажа, затраты на низковольтные кабели и жгуты, а так же упрощает и ускоряет процесс диагностики неполадок.
Рис.1 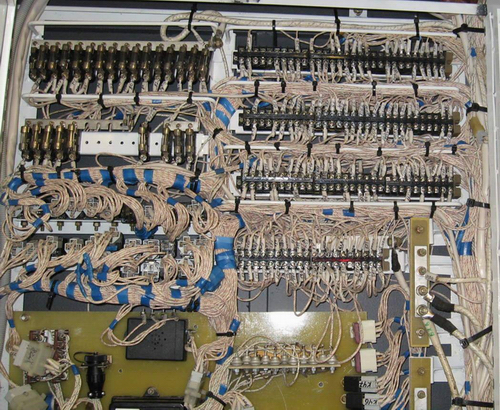 Рис.2 Рис.2  В местах установки электрооборудования устанавливаются микроконтроллеры (МК), которые соединены между собой с помощью цифрового канала связи (рис. 3). На каждый блок подается питание. Все блоки сообщают состояние обслуживаемых ими систем и команды другим блокам по информационному каналу и, соответственно, каждый блок управляет своим оборудованием, зная одновременно, что происходит во всей системе.
Рис.3 Распределенная система управления на CAN-интерфейсе.
В местах установки электрооборудования устанавливаются микроконтроллеры (МК), которые соединены между собой с помощью цифрового канала связи (рис. 3). На каждый блок подается питание. Все блоки сообщают состояние обслуживаемых ими систем и команды другим блокам по информационному каналу и, соответственно, каждый блок управляет своим оборудованием, зная одновременно, что происходит во всей системе.
Рис.3 Распределенная система управления на CAN-интерфейсе.

 Общий смысл системы заключается в том, чтобы с помощью CAN-технологии сократить в несколько раз количество проводов, трудоемкость монтажа и настройки при сборке, проводить полную диагностику всех электрических и электронных систем, пневмосистемы, системы отопления и вентиляции. И не только! Можно собирать всю информацию об их работе, обрабатывать ее и выводить необходимые данные о неисправностях и методах их устранения на информационную панель кабины водителя с использованием базы данных, которая находится в памяти троллейбуса.
Рис. 4 Информационная панель и панель управления.
Общий смысл системы заключается в том, чтобы с помощью CAN-технологии сократить в несколько раз количество проводов, трудоемкость монтажа и настройки при сборке, проводить полную диагностику всех электрических и электронных систем, пневмосистемы, системы отопления и вентиляции. И не только! Можно собирать всю информацию об их работе, обрабатывать ее и выводить необходимые данные о неисправностях и методах их устранения на информационную панель кабины водителя с использованием базы данных, которая находится в памяти троллейбуса.
Рис. 4 Информационная панель и панель управления.
  Можно выделить следующие основные эффекты от применения CAN:
Можно выделить следующие основные эффекты от применения CAN:
|
Источник:
http://www.npfarsterm.ru/produkciya/?id=22&item=17
Применение CAN в автомобилестроении
Во всех высокотехнологических системах современного автомобиля применяется CAN-протокол для связи ЭБУ с дополнительными устройствам и контроллерами исполнительных механизмов и различных систем безопасности. В некоторых автомобилях CAN связывает IMMO, приборные панели, SRS блоки и т. д.
Также протокол CAN ISO 15765-4 вошел в состав стандарта OBDII.
Преимущества и недостатки
Преимущества
· Возможность работы в режиме жёсткого реального времени.
· Простота реализации и минимальные затраты на использование.
· Высокая устойчивость к помехам.
· Арбитраж доступа к сети без потерь пропускной способности.
· Надёжный контроль ошибок передачи и приёма.
· Широкий диапазон скоростей работы.
· Большое распространение технологии, наличие широкого ассортимента продуктов от различных поставщиков.
Недостатки
· Небольшое количество данных, которое можно передать в одном пакете (до 8 байт).
· Большой размер служебных данных в пакете (по отношению к полезным данным).
· Отсутствие единого общепринятого стандарта на протокол высокого уровня, однако же, это и достоинство. Стандарт сети предоставляет широкие возможности для практически безошибочной передачи данных между узлами, оставляя разработчику возможность вложить в этот стандарт всё, что туда сможет поместиться. В этом отношении CAN подобен простому электрическому проводу. Туда можно «затолкать» любой поток информации, который сможет выдержать пропускная способность шины. Известны примеры передачи звука и изображения по шине CAN (Россия). Известен случай создания системы аварийной связи вдоль автодороги длиной несколько десятков километров (Германия). (В первом случае нужна была большая скорость передачи и небольшая длина линии, во втором случае — наоборот). Изготовители, как правило, не афишируют, как именно они используют полезные байты в пакете.
Распределенная система управления троллейбусом на CAN-интерфейсе внедряется в Новосибирске
21.07.2009
Распределенная система управления троллейбусом на CAN-интерфейсе, разработанная в НПФ «Арс Терм», успешно прошла испытания и уже внедряется на городском электротранспорте Новосибирска.
CAN - Control Area Network - коммуникационная сеть для встроеных систем управления ("интеллектуальных" устройств ввода/вывода, датчиков и исполнительных устройств), которая использует минимальное количество проводов при сохранении высокой надежности связи. Распределенные системы на CAN-интерфейсе уже давно применяются европейскими автомобилестроителями в силу их высокой надежности, гибкости, помехоустойчивости и сравнительно невысокой стоимости.
По словам коммерческого директора НПФ "Арс Терм" Максима Пошевнёва, новая разработка новосибирской компании имеет неплохие коммерческие перспективы. Кроме уже перечисленных плюсов, система на CAN-интерфейсе позволяет производителям троллейбусов сэкономить и на материалах – в частности, меди. Сейчас информация о разработке направлена всем потенциальным клиентам из числа российских производителей и уже вызвала их интерес. Возможно применение новосибирской системы и в капитально-восстановительном ремонте (КВР) – здесь, по словам М.Пошевнёва, интерес к разработке так же есть, правда, «пока люди присматриваются».
Увидеть систему распределенного управления «живьем» можно было на выставке «АВТОСИБ-2009», прошедшей в конце мая этого года в Новосибирске. Разработка была установлена на троллейбус производства ООО «Сибирский троллейбус». Сегодня такой системой управления оборудованы более десятка подвижных составов трамваев и троллейбусов Новосибирска и Кемерово, отмечают в НПФ «Арс Терм».
Всего в мире с момента изобретения протокола CAN в начале 80-х годов уже продано более двух миллиардов CAN-узлов. В 1993 году CAN был регламентирован в международном стандарте ISO 11898-1, отмечается на сайте CAN in Automation (CAN в Автоматизации) - международной организации пользователей и изготовителей, которая продвигает CAN-разработки. Эта некоммерческая организация была основана в 1993 году для распространения технической, товарной и маркетинговой информации о CAN. Более 500 компаний сейчас являются членами CiA, располагающейся в Нюрнберге, в Германии.
Российская система распределенного управления троллейбусом на CAN-интерфейсе позволяет свести до минимума количество сигнальных и питающих проводов (а это сокращение времени изготовления, сборки и настройки системы), позволяет обеспечить высоку скорость взаимодействия отдельных узлов внутри системы, обладает низкой стоимостью по сравнению с традиционными средствами связи, проста в техническом обслуживании и полифункциональна. Кроме того, система на CAN-интерфейсе позволяет водителю из своего кресла проводить полную диагностику оборудования и дистанционно контролировать техническое состояние троллейбуса. В этом случае, существует возможностью считывания данных о работе таких ключевых устройств, как прибор контроля утечки токов, счетчик учета потребляемой электроэнергии в диспетчерском пункте в то время, когда троллейбус находится на маршруте.
Что касается технической стороны дела, то система выглядит следующим образом: в местах установки электрооборудования ставятся микроконтроллеры (МК), которые соединены между собой с помощью цифрового канала связи (CAN-шины). На каждый блок подается питание. Все блоки сообщают состояние обслуживаемых ими систем и команды другим блокам по информационному каналу и, соответственно, каждый блок управляет своим оборудованием, зная одновременно, что происходит во всей системе.
Обмен информацией между элементарными узлами блоков, участвующих в системе, хотя и увеличивает нагрузку на сеть, позволяет получать данные о состоянии системы на самом «низком» уровне. Кроме того, равнозначность всех блоков-фрагментов системы и распределенность системы управления, когда в ней нет центрального управляющего узла, позволяет сделать систему гораздо более живучей. Даже выход из строя какого-либо из блоков в ситуации, когда все узлы функционируют независимо и автономно, позволяет всем остальным продолжать выполнять свои задачи. Кроме того, протокол CAN обладает развитой системой обнаружения и сигнализации об ошибках.
CAN технология позволяет собирать всю информацию о работе внутренних систем троллейбуса или трамвая, обрабатывать ее и выводить необходимые данные о неисправностях и методах их устранения на информационную панель кабины водителя с использованием базы данных, которая находится в памяти троллейбуса или трамвая. Вывод результатов производится в доступной для обычного пользователя (водителя транспортного средства) форме и не требует какой-либо спецподготовки персонала, отмечают в НПФ «Арс Терм».
Еще один любопытный аспект, который может заинтересовать не только руководство эксплуатационных предприятий, но и муниципалитеты, это возможность получения дополнительной информации с использованием CAN-технологий, а также обеспечения безопасности пассажиров. Так, в случе установки в салоне троллейбуса веб-камер, муниципальные власти смогут получить данные о пассажиропотоке, взимать плату за проезд с использованием электронных карт оплаты, ловить безбилетников и получать оперативную информацию о происшествиях.
Что такое CAN шина?
CAN модуль, CAN шина, CAN интерфейс, CAN - все это названия стандарта промышленной сети, ориентированного прежде всего на объединения в единую сеть различных устройств и датчиков.
Если говорить простым языком, применительно непосредственно к автомобилю, то CAN - это устройство которое дает возможность объединить и использовать максимально большое количество функций и свойств различных электронных устройств. В зависимости от электронной системы в автомобиле может быть реализованно определенное количество функций. К примеру, заводской электронной системой, установленной в автомобиль при его производстве предусмотрено только несколько функций: подъем стекол и электронная регулировка сидений, а такой возможности как электронная функция управления багажником (открытие/закрытие) нет. Для того, чтобы реализовать эту функцию (открытие/закрытие багажника) требуется более разветвленная система. И в этом случае приходит на помощь CAN шина, которая позволяет реализовать на данном автомобиле данную функцию и многие другие. CAN служит для более быстрого и большего объема передаваемой информации между различными устройствами (контроллерами).
CAN - от английского Controller Area Network, что переводится как Сеть Контроллеров. CAN стандарт разработан компанией Robert Bosch GmbH 1980-х и в настоящее время широко распространён в промышленной автоматизации, технологиях «умного дома», автомобильной промышленности и многих других областях.
Date: 2016-05-23; view: 546; Нарушение авторских прав