Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Методы организации доступа к линиям связи 1 page
|
|
Метод доступа – это набор правил, позволяющий пользователям работать с локальной сетью, не мешая друг другу. Метод доступа реализуется на физическом уровне.
Если несколько устройств коммутируются между собой через общую линию связи (шину), то должен быть определен ясный и понятный протокол доступа к ней. Существуют два метода упорядоченного доступа: централизованный и децентрализованный.
В случае централизованного контроля за доступом к шине выделяется узел с правами Мастера. Он назначает и отслеживает порядок и время доступа к шине для всех других участников. Если на Мастере произошла авария, то и циклы обмена по шине останавливаются. Именно по этой причине децентрализованный контроль с переходящими функциями мастера от одного участника (узла сети) к другому получил наибольшее развитие. Здесь права Мастера назначаются группе устройств сети. Во всем мире приняты и широко используются две модели децентрализованного доступа: модель CSMA / CD и модель с передачей маркера.
Модель CSMA / CD (Ethernet, стандарт IEEE 802-3). Наиболее известным механизмом управления локальной сетью шинной конфигурации является метод множественного доступа с контролем несущей и обнаружением конфликтов (CSMA / CD – Carrier Sense Multiple Access with Collision Detect). Наиболее широко известная реализация этого метода – спецификация Ethernet. Все станции на шине имеют право передавать данные. Каждая из них постоянно прослушивает шину. Если шина свободна, любая из станций сети может занять шину под свой цикл передач. В том случае, когда несколько станций претендуют на шину одновременно, это приводит к так называемому конфликту (коллизии),
и тогда станции снимают свою «заявку» на случайный промежуток времени, задаваемый случайным генератором, и затем через удвоенный промежуток времени вновь выходят в сеть. Аналогией подобного метода взаимодействия может служить «разговор группы воспитанных людей в небольшой темной комнате». Каждый человек в комнате слышит речь других людей – обнаружение несущей. Все в комнате имеют одинаковые возможности вести разговор – это множественный доступ, но никто не говорит слишком долго, так как все вежливы. Все, находящиеся в комнате, молчат, пока кто-то не начинает говорить. Если два человека начинают говорить одновременно, то они сразу обнаруживают эту коллизию. В этом случае они замолкают на некоторое время, после чего один из них может вновь начать говорить. Другие люди слышат, что ведется разговор, и ждут, когда он закончится, после чего сами могут говорить. При этом в начале разговора называется имя того, к кому обращаются (своего рода адрес), а затем и свое имя. Возможен аналог широковещательной передачи, когда кто-то обращается ко всем одновременно.
Одним из реальных способов определения наличия коллизий при передаче, например по коаксиальному кабелю, является способ определения коллизий по повышенному уровню постоянной составляющей сигнала. Детектор коллизий определяет превышение уровнем сигналов определенного порога (около 1,5 В), что означает, что на кабель работает более одного передатчика.
Метод CSMA / CD получил широкое распространение и наиболее эффективен в условиях относительно низкой общей загрузки канала (менее 30 %). В условиях большей загрузки канала выгоднее использовать сети, реализующие модель с передачей маркера.
Модель с передачей маркера (Token Passing Model, стандарт IEEE 802.4). Право на доступ к шине передается в цикле от устройства к устройству. Порядок передачи зависит от прикладной задачи и определяется на стадии планирования системы. Этот метод предлагает каждому участнику сети «справедливое» разделение шинных ресурсов в соответствии с их запросами. Принцип передачи маркера используется в системах, где реакция на события, возникающие в распределенной системе, должна проявляться за определенное время. Для совместной работы сетей типа CSMA / CD и Token Model необходим так называемый межсетевой шлюз.
Метод MASTER – SLAVE (централизованный метод) находит свое применение в промышленных сетях как на контроллерном уровне (field level), так и на уровне датчиков и исполнительных механизмов (sensor / actuator level). Право инициировать циклы чтения/записи на шине имеет только MASTER -узел. Он адресует каждого пассивного участника (SLAVE -узел), обеспечивает их данными и запрашивает у них данные. Для того чтобы увеличить пропускную способность шины, команды протокола должны быть как можно проще. В рамках протокола решаются такие задачи, как защита данных, обнаружение ошибок при передаче, восстановление данных. На скорость и объем передаваемой информации естественным образом влияет среда передачи.
2.4.2. Структура и активные элементы промышленной сети
Физически промышленная сеть включает в себя сегменты (отрезки кабеля) и набор активных устройств, осуществляющих формирование, преобразование, коммутацию, передачу сигнала с использованием внешнего источника энергии. Активные устройства можно разделить на рабочие станции (источники и приемники сигнала – это промышленные компьютеры, PLC, интеллектуальные устройства), репитеры, концентраторы, хабы, трансиверы, мосты, маршрутизаторы и шлюзы.
Сеть состоит из сегментов – участков кабеля, заканчивающихся нормирующимися резисторами – терминаторами. Кабели через ответвители подключаются к различным узлам (рис. 2.13).
Если сеть больше длины сегмента, то к концу кабеля через ответвитель подключают повторитель. Повторитель – это двухпортовое активное физическое устройство, которое восстанавливает и переправляет сигналы с одного сегмента на другой.

Рис. 2.13. Структура промышленной сети:
У – узел (подключаемое устройство); О – ответвитель
Многопортовые репиторы называются концентраторами. Их функции те же, что и у репитера.
С появлением протокола 10 BaseT «витой пары» концентраторы стали называться хабами. Большинство концентраторов и хабов выполняют следующие операции:
· Автосегментация – автоматическое включение и отключение порта, отображение состояния портов с помощью светодиодов;
· Обнаружение ошибки полярности сигнала. Репитеры и концентраторы могут использоваться для увеличения размера и организации требуемой топологии сети, за исключением топологии «кольцо».
В настоящее время хабы относят к устаревшему оборудованию. По всем техническим показателям они уступают коммутаторам, которые имеют в 10 раз большую скорость обмена информации в сети, однако хабы на 30–40 % дешевле коммутаторов
и они более надежны в тяжелых условиях эксплуатации.
Коммутаторы – это многопортовые устройства. Их делят на 2 класса:
5–8-портовые коммутаторы, которые используются в сетях небольшого размера;
12-, 16-, 24-портовые, которые используются в более сложных сетях, имеют порты для коаксиального и трансиверного (AUI) кабелей.
Мосты.
Если 2 сегмента сети слишком велики для объединения их
в один коллизионный домен (логическое объединение сети)
и территориально удалены друг от друга, то применяют мосты. Мосты – это устройства, соединяющие 2 отдельные сети или 2 сегмента одной сети, в которой используются одинаковые протоколы обмена информацией. Мосты устанавливают соединения, фильтруют пакеты. По принципу действия они не отличаются от коммутаторов в том, что коммутатор – это многопортовое устройство и в основном ассоциируется с сетями Ethernet, а мосты чаще всего одноканальные устройства, и термин ближе к пользователям, работающие с полевой шиной. В последнее время мостами стали называть устройства, предназначенные для связи локальных сетей с фазными физическими средами передачи.
Маршрутизаторы – это устройства, выбирающие маршрут передачи данных. Они осуществляют виртуальное соединение на 4 уровне модели OSI / ISO. Если мосты для передачи кадров (пакетов) используют адреса физического уровня, то маршрутизаторы используют IP адреса Internet протокола. При этом маршрутизатор разворачивает пакет данных и извлекает из него дейтограммы IP и по его заголовку направляет пакет абоненту. Дейтограммы – это способ передачи пакетов в произвольном порядке без подтверждения получения пакета. Маршрутизаторы, подобно повторителям, используют буферизацию сигнала, а затем восстанавливают его уровень и форму. Они могут соединять сети с различными протоколами доступа, но при этом верхние уровни модели OSI / ISO (5, 6, 7 уровни) отправителя и получателя должны быть одинаковыми (рис. 2.14).

Рис. 2.14. Структура компьютерной сети с маршрутизатором, коммутатором и хабами
Шлюзы – это устройства, служащие для объединения сетей с различными протоколами обмена. Шлюз обычно выполняет протоколы на всех уровнях модели OSI / ISO. Также шлюз может выполнять функции маршрутизатора, но скорость при этом несколько снижается.
2.4.3. Краткая характеристика протоколов
промышленных сетей
При выборе промышленной сети (протокола) используются следующие критерии:
· Объем передаваемых данных;
· Время передачи фиксированного объема данных;
· Удовлетворительные требования реального времени;
· Максимальная длина шины;
· Допустимое количество узлов;
· Помехозащищенность;
· Стоимость сети в расчет на один узел.
Протокол нижнего (сенсорного) уровня AS ( ASI ) (рис. 2.15) создан в 1989 г. и поддерживается фирмами Siemens, IBM и др. По данному протоколу можно передавать не только данные, но
и напряжение питания к узлу сети по одной паре проводов. Каждый узел сети должен иметь интерфейсную микросхему с поддержкой данного протокола.
Топология может быть «кольцо», «звезда», «шина», «дерево». Длина сегмента – до 100 м, с репитерами – до 300 м. Максимальное число узлов, подключаемых к Master узлу – 62, время цикла – 5–10 мс. Физическая среда – двухпроводной канал. При длине сети L =300 м скорость равна 167 кбод. Для передачи информации используется манчестерский код. Общий ток в системе – до 2 А. К каждому узлу подводится напряжение 24 В.
ModBus Modicon – это протокол фирмы Modicon, в котором физический интерфейс не определен, пользователь сам выбирает этот интерфейс (чаще RS -485). Конфигурация: 1 Master узел и до 247 Slave узлов. Протокол описан фиксированной формой команд.
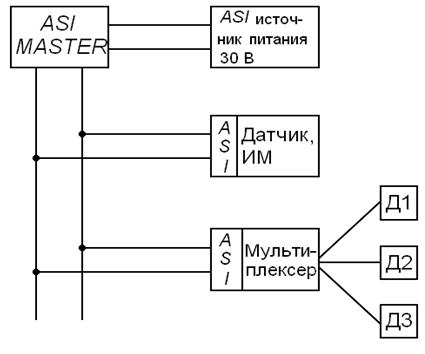
Рис. 2.15. Пример конфигурации устройств по протоколу ASI:
Д1, Д2, Д3 – датчики
HART – это протокол разработан в 1980 г. американской фирмой Fisher Rosemaut, он реализует принцип частотной модуляции для организации цифровой передачи, основанной на сигнале 4–20 мА. В этой системе на аналоговый сигнал 4–20 мА накладывается частотно-модулированный цифровой сигнал с амплитудой ±0,5 мА. При этом лог. «1» соответствует частота
f = 1200 Гц, а лог. «0» – f = 2200 Гц. «Витая пара» используется в качестве физической среды. Топология: «звезда» или «точка-точка». Возможна топология «шина» на 1543 узла. Обмен данными-асинхронный. Протокол может иметь до двух мастер-узлов
(чаще 1).
InterBus - S – это популярный протокол благодаря дальности охвата, гибкости, быстродействию, хорошей диагностике, разработан в 1984 г. Физический уровень основан на RS -485 и представляет собой последовательное кольцо. Достоинствами этого протокола является то, что он обеспечивает точность сведений
о сетевых отказах, что упрощает их поиски и устранение, и может работать как с аналоговыми, так и с цифровыми вводами/выводами. Имеет максимально 512 узлов, расстояние между которыми до 400 м, 12,8 км – общая длина сети, скорость передачи – 500 кбит/с.
Device Net – это протокол, разработанный американской фирмой Allen Brandly в 1984 г. Он обеспечивает связь между различными устройствами нижнего и контроллерного уровня. Сеть имеет топологию «шина» с 4-проводной линией связи. Кроме протокола обмена сеть регламентирует разъемы, типы разъемов, диагностирует индикаторы. Дополнительно к чтению состояния дискретных датчиков и управлению пусковыми устройствами сеть позволяет передавать величину тока нагрузки пусковых устройств, значение температуры, изменять скорость электрического привода и регулировать пороги датчиков. Сеть включает 64 узла, к которым могут подсоединяться до 32 устройств на каждый узел. Общая длина сети – 12,2 км. Скорость передачи при
L = 500 м – 125 кбит/с, при L = 250 м – 250 кбит/с, при L = 100 м – 500 кбит/с.
Контроллерные сети
Сеть BitBus разработана фирмой Intel в 1984 г., использует принцип «Master-Slave». Физический интерфейс основан на
RS -485. Физическая среда – экранированная «витая пара». Максимальная длина сети – 13,2 км, 240 абонентов, 1,2 км – длина сегмента, 28 абонентов на одном сегменте. Данная сеть дает возможность построения сложных систем и не требует больших аппаратных затрат. Позволяет организовать 2 режима передачи данных по шине:
· Синхронный режим (расстояние до 30 м, скорость передачи 500–2400 кбит/с) для передачи больших массивов информации. Максимальное число узлов – 28;
· Режим с самосинхронизацией: скорость – 375 кбит при длине до 300 м и 62,5 кбит/с при длине до 1200 м; максимальная длина линии связи с репитерами – 13,2 км.
ProfiBus – этот протокол разработан немецкими фирмами Siemens и Bosh в 1991 г. Описывает 1, 2, 7-й уровни модели OSI / ISO, имеет 122 узла, из которых 32 – Master, остальные – Slave узлы. В среде Master узлов по возрастающим номерам узлов передается маркер (рис. 2.16), который предоставляет право ведения циклов чтения – записи по шине. Данный протокол разбит на 3 различных, но совместимых протокола. Пример АСУ ТП на базе протоколов ProfiBus представлен на рис. 2.17.
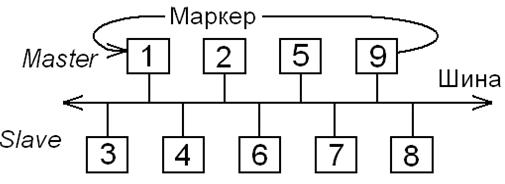
Рис. 2.16. Ведущие (Master) и ведомые (Slave) узлы,
подключенные к шине по протоколу ProfiBus

Рис. 2.17. Пример сетевой структуры АСУ ТП
на базе трех протоколов ProfiBus: PC – компьютер;
Д – датчик; ИМ – исполнительный механизм
Протокол ProfiBus-DP объединяет датчики Д и исполнительные механизмы ИМ. Его характеристики:
· Физический уровень – RS -485;
· Максимальное число станций – 32;
· Максимальная скорость передачи данных – 1,5 Мбит/с;
· Длительность цикла опроса – не более 6 мс.
Протокол ProfiBus-PA используется во взрывоопасных помещениях, длина сегмента – 1900 м.
Протокол ProfiBus-FMS используется для связи контроллеров PLC и интеллектуальных устройств PC с передачей больших объемов данных.
Control Net – протокол, имеющий топологию общую «шину» или «звезду», удовлетворяет требованию режима реального времени (высокая пропускная способность всех критичных данных, имеющих более высокий приоритет перед остальными данными). PLC, Д, ИМ – рабочие станции. Протокол имеет 99 узлов, которые можно подключать в любом месте шины через ответвители. Архитектура позволяет работать с несколькими процессорами.
Сети диспетчерского уровня (универсальные сети)
World-FIP. Производители – Италия, Франция, Бельгия. Сеть описывает уровни 1, 2, 7 OSI / ISO. Физическая среда – «витая пара» или оптоволокно.
CANBUS (CAN). Производитель – фирмы Bosh, сеть описывает уровни 1, 2 OSI / ISO.
Foundation FieldBus. Протокол разработан в США в
1998 г., позволяет использовать программное и алгоритмическое обеспечение различных производителей, является двухуровневым, сочетающим черты мощной информационной магистрали для объединения компьютеров и рабочих станций верхнего уровня и управляющей сети, объединяющей PLC, Д, ИМ. На нижнем уровне имеется стандарт IEC 61158, который позволяет использовать сеть во взрывоопасном помещении (скорость передачи 31,25 Мбит/с). На верхнем уровне действует протокол Fast Ethernet (скорость передачи 100 Мбит/с). Максимальное число узлов в сегменте – 240.
Industrial Ethernet. В современных системах автоматизации технология Ethernet используется для организации сети верхнего уровня, обеспечивающей взаимодействие рабочих станций, серверов, принтеров, накопителей данных и т.д. Сопряжение такой сети с полевыми шинами осуществляется посредством промышленных компьютеров и контроллеров с использованием конвертеров – протоколов PKV -40, которые позволяют связать среду Ethernet с основными протоколами сенсорного уровня (CAN, Device Net, ProfiBus – DP, AS). Сеть Ethernet использует протокол стандарта TCP / IP.
Протокол TCP / IP – это многоуровневый протокол, состоящий из транспортного уровня TCP и сетевого уровня IP, в котором информация формируется в виде блоков, называемых дейтограммами. Дейтограмма состоит из заголовка и поля данных. Размер дейтограммы, который может быть принят устройством сети, 576 байт. Модуль IP подготавливает заголовок дейтограммы и подсоединяет к нему данные, полученные от протоколов верхнего уровня, в частности от TCP, определяет подсетевой адрес и передает их модулю, реализующему протокол отправителя, который создает подзаголовок подсети и присоединяет к нему дейтограмму. Протокол TCP является транспортным протоколом стека TCP / IP. Управление содержит информацию о длине поля данных и о типе кадров.
В настоящее время предпринимаются попытки использовать протокол Industrial Ethernet на контроллерном и сенсорном уровне АСУ ТП, однако присущие ему недостатки ограничивают использование его на нижних уровнях АСУ ТП. Во-первых, технология создана для интенсивного обмена информацией, однако полевым устройствам необходимо передавать сравнительно небольшие объемы данных и через сравнительно длинные промежутки времени. Во-вторых, протокол Ethernet не рассчитан на организационные связи с гарантированными задержками, т.е. не рассчитан на работу в режиме реального времени.
3. МАТЕМАТИЧЕСКОЕ И ПРОГРАММНОЕ
ОБЕСПЕЧЕНИЕ АСУ ТП
В соответствии с терминологическими стандартами под математическим обеспечением АСУ ТП понимается совокупность математических методов, моделей и алгоритмов, используемых при разработке и функционировании данных систем. Программное обеспечение АСУ ТП охватывает совокупность программных средств, обеспечивающих функционирование программно-технического комплекса (ПТК) и решение задач контроля
и управления технологическим объектом. Условно математическое и программное обеспечение можно разделить на методы, алгоритмы и программы решения задач управления на контроллерном и на диспетчерском уровне АСУ ТП. На контроллерном уровне решаются задачи первичной обработки измерительной информации, получаемой от аналоговых, дискретных и импульсных датчиков, и формирование управляющих воздействий,
в большинстве случаев, по типовым математическим или логическим закономерностям. Большинство задач контроллерного уровня решается в режиме «реального времени», т.е. в темпе, обеспечивающем нормальный ход технологического процесса. На диспетчерском уровне решаются задачи визуализации полученной информации, ее архивирование, вычисление интегральных и средних показателей, поиск оптимальных режимов работы оборудования и т.д.
3.1. Первичная обработка измерительной информации
3.1.1. Схема преобразования измерительной информации
в контроллере
Состояние объекта управления, исполнительных устройств в АСУ ТП оценивается по сигналам измерительных преобразователей, датчиков положения и других элементов автоматики.
В большинстве своем данные сигналы являются электрическими (ток, напряжение, сопротивление, частота и т.д.). Для обработки сигналов в контроллерах и других вычислительных устройствах их преобразуют в цифровую форму. Однако получаемая таким образом информация не пригодна для использования в задачах управления объектом и требуется ее предварительная обработка, которую называют первичной.
Для определения перечня задач, решаемых при первичной обработке информации, при контроле ее на достоверность, целесообразно рассмотреть последовательность преобразований, которым подвергается сигнал измерительной информации в типовом информационно-измерительном канале (ИИК), структурная схема которого представлена на рис. 3.1.
Так в большинстве случаев обеспечить номинальное условие преобразования не удается, измерительный преобразователь вносит в сигнал y (t) дополнительную погрешность. Кроме этого, в сигнал z (t) входят погрешности, вносимые условиями передачи информации от преобразователя к контроллеру, а также погрешности, вносимые нормирующими преобразователями (если они используются в ИИК), т.е. на вход контроллера поступает суммарный сигнал:
 (3.1)
(3.1)
где e (t) – помеха.
Ввод информации от входных модулей в основной блок контроллера осуществляют соответствующие драйверы. Каждый драйвер циклически со своим периодом опроса заносит информацию в область памяти с совместным доступом. Период опроса аналоговых переменных зависит от динамических характеристик канала измерения. Чтобы переменная была достоверно представлена квантованным сигналом, удовлетворяющим всем задачам, необходимо иметь 20–25 значений на период максимальной гармоники, которая присутствует в сигнале. Для большинства аналоговых переменных удовлетворительным является цикл опроса 0,1–0,2 с.
Для дискретных переменных цикл опроса должен обеспечивать выполнение требования по быстродействию задач потребителей, а также по точности присвоения метки времени. Для большинства дискретных переменных цикл опроса составляет
0,1 с.

Рис. 3.1. Структурная схема преобразования и первичной
обработки измерительной информации
Драйверы входных модулей запрограммированы так, что они выдают значения переменных в единицах датчика – микроамперы для токовых датчиков, миллиомы и микровольты для температурных датчиков, «0» или «1» для дискретных датчиков. Каждый драйвер имеет настроечную информацию: частоту среза фильтра при входе, период опроса.
Взаимодействие базового блока со служебным программным обеспечением контроллеров (драйверами внешних устройств, модулями диагностики и сетевым программным обеспечением контроллеров) осуществляется с помощью специализированных программных устройств (СПУ) ввода/вывода, образующих отдельную библиотеку в системе разработки «IO boards». Программные устройства ввода/вывода имеют унифицированный интерфейс, а на уровне контроллера поддерживаются также соответствующим расширением исполняемого ядра.
Информация, занесенная драйвером в свою область памяти, вычитывается средствами библиотеки «IO boards» со своим циклом выполнения. «IO boards» выдают значения входных величин в микроамперах для токовых датчиков, и в миллиомах, микровольтах для температурных датчиков.
Средствами «Isa Graf» или других инструментальных средств программирования контроллеров производится дальнейшая первичная обработка считанных переменных. Для обработки информации в библиотеке «Isa Graf» используются функциональные блоки, выполняющие следующие функции: фильтрацию, масштабирование (получение значения аналоговой переменной
в технических единицах и в безмерных единицах от 0 до 1000), линеаризацию, контроль достоверности, формирование событий при достижении переменной величины уставки. Затем обработанные значения со своими итоговыми признаками достоверности заносятся в локальный массив входной информации (мгновенную базу данных).
Средствами библиотеки «IO boards» организуются отправка сообщений в коммуникационную среду АСУ ТП и выдача команд на устройства вывода.
3.1.2. Перекалибровка каналов АЦП
Сигналы Z (t) поступают в соответствующие входные модули контроллера, где осуществляется их преобразование в цифровую форму. Аналоговые сигналы преобразуются с помощью таких компонентов, как усилители, фильтры, схемы выборки-хранения, мультиплексоры и аналого-цифровые преобразователи (АЦП). АЦП являются основными элементами аналогового вида, и их характеристики, в основном, определяют характеристики блока аналогового ввода в целом. Они по ряду параметров отличаются от идеальных. Чаще всего проявляются погрешности, связанные с нестабильностью источника опорного напряжения, коэффициентов усилительных каскадов и т.д. Как правило, смещение этих параметров, в основном связанное с изменением окружающей температуры, имеет малую скорость. Поэтому для минимизации данной погрешности применяют метод периодической перекалибровки модуля ввода в процессе измерения. Алгоритм перекалибровки сводится к периодическому обновлению калибровочных констант: 1) смещения нуля АЦП ( ); 2) масштаба шкалы измерения (
); 2) масштаба шкалы измерения ( ).
).
Масштаб шкалы измерения определяется по формуле
 (3.2)
(3.2)
где  – значение первой калибровочной величины ( = 0);
– значение первой калибровочной величины ( = 0);
 – значение второй калибровочной величины;
– значение второй калибровочной величины;
– смещение нуля АЦП (показание АЦП в первой калибровочной точке);
 – показание АЦП во второй калибровочной точке.
– показание АЦП во второй калибровочной точке.
Чем дальше разнесены опорные точки, тем выше точность измерения. Обычно опорные точки выбираются вблизи предельных значений измеряемой величины.
Смещение нуля () АЦП производится прямым измерением.
Значение измеряемой величины (D) после перекалибровки определяется по выражению
 (3.3)
(3.3)
где N – показание АЦП (16- или 24-разрядное значение).
Обновление калибровочных констант (, ) в каждом канале производится в процессе работы входного модуля через R обычных измерений величины D. При этом увеличение числа R уменьшает частоту перекалибровки и затраты времени (накладные расходы по времени) на эту операцию, что положительно сказывается на обеспечении режима реального времени. Однако это приводит к снижению точности преобразования, так как система менее оперативно отслеживает температурные дрейфы АЦП и другие изменения в параметрах системы. Число R определяется для каждого или группы однотипных каналов индивидуально
и является одной из задач первичной обработки информации, наряду с разработкой алгоритма перекалибровки.
3.1.3. Определение периода опроса каналов
Ввод информации от входных модулей в центральный блок контроллера осуществляют соответствующие драйверы каналов. Каждый драйвер циклически со своим периодом опроса заносит информацию в свою область памяти с совместным доступом. Период опроса аналоговых переменных зависит от динамических характеристик сигнала и канала измерения. Выбор данного периода базируется на теореме Котельникова – Шеннона, которая определяет необходимые условия передачи без искажения информации, содержащейся в непрерывном сигнале при его квантовании по времени и последующем восстановлении. Ввиду сложности реализации в полном объеме условий данной теоремы, на практике для определения периода опроса используют следующие рекомендации:
– для достоверного представления измеряемой переменной х (t) квантованным сигналом Z (jT), удовлетворяющим всем задачам-потребителей, необходимо иметь 20–25 значений данной переменной на период гармоники максимальной частоты, присутствующей в сигнале (для большинства переменных удовлетворительным считается цикл опроса в 0,1–0,2 с);
Date: 2016-05-15; view: 933; Нарушение авторских прав