Синтез автомата
Проводимо розмітку автомата згідно алгоритму розмітки автомата Мура:
вершини початку та кінця алгоритму позначаю а0, вершини, що йдуть потім – аі, де і = 1..n. Враховую те, що сигнал Y3 має тривалість 2t і вводжу додаткові стани.
Для запобігання протигоночному ефекту виконую сусіднє кодування станів автомата. Складаємо та розмічаємо виправлену граф-схему алгоритму та граф переходів автомата. На графі переходів вершини відповідають станам автомата, а дуги - логічні умови переходів із одного стану в інший та мікрооперації, що виконуються. Також складаю таблицю станів автомата. | КП.2015.ФЕКІ.102.043.002.ПЗ
|
| КП.2015.ФЕКІ.102.043.002.ПЗ
|
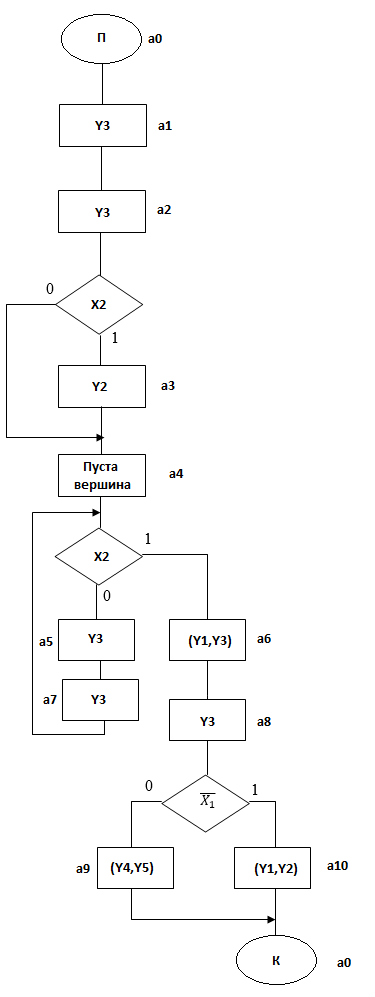
Рисунок 2.1. – Закодована ГСА Мура
| КП.2015.ФЕКІ.102.043.002.ПЗ
|
               
Рисунок 2.2. – Граф переходів автомата Мура
Рисунок 2.3. – Остовне дерево
Додаючи додатковий стан між вершинами а2 та а4 (рис. 2.2) отримуємо на графі парні цикли.

Рисунок 2.4– Виправлений граф з додатковим станом
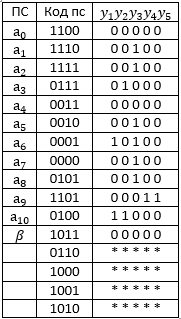
Кодую стани автомата:
Таблиця 2.1. – Закодовані стани автомату
| КП.2015.ФЕКІ.102.043.002.ПЗ
|
Далі будуємо структурну таблицю переході автомата Мура.
Таблиця 2.2. – Структурна таблиця переходів автомата Мура
| ПС
| Код пс
| СП
| Код сп
| 
| 
| 
| 
| 
| 
| 
| 
|
| 
|
| *
| *
| 0*
| 0*
|
| *0
| 0 0 0 0 0
| |
|
| 
|
| *
| *
| 0*
| 0*
| 0*
|
| 0 0 1 0 0
| |
|
| 
|
| *
|
|
| 0*
| 0*
| 0*
| 0 0 1 0 0
| |
|
| 
|
| *
| *
| *0
|
| 0*
| 0*
| 0 1 0 0 0
| |
|
| 
|
| *
|
| 0*
|
| 0*
| 0*
| 0 0 1 0 0
| |
|
|
|
| *
| *
|
| *0
| 0*
| 0*
| 0 0 0 0 0
| |
|
| 
|
| *
|
| *0
| *0
| 0*
|
| 0 0 0 0 0
| |
|
| 
|
| *
| *
| *0
| *0
|
| *0
| 0 0 1 0 0
| |
|
|
|
| *
|
| *0
| *0
|
| *0
| 0 0 1 0 0
| |
|
| 
|
| *
|
| *0
| *0
| *0
|
| 0 0 1 0 0
| |
|
|
|
| *
|
| *0
| *0
|
| 0*
| 0 0 0 0 0
| |
|
| 
|
| *
| *
| *0
|
| *0
|
| 1 0 1 0 0
| |
|
| 
|
|
| *
|
| 0*
| *0
| 0*
| 0 0 1 0 0
| |
|
|
|
| *
| *
| 0*
| 0*
|
|
| 0 0 0 1 1
| |
|
| 
|
|
| *
| *0
| 0*
| *0
|
| 0 0 1 0 0
| |
|
|
|
| *
| *
|
| 0*
| *0
| *0
| 1 1 0 0 0
|
Мінімізую функції збудження | КП.2015.ФЕКІ.102.043.002.ПЗ
| RS-тригерів за допомогою діаграми Вейча:

 
 
Далі будуємо таблицю виходів автомата Мура.
Таблиця 2.2. – Таблиця виходів автомата Мура
| КП.2015.ФЕКІ.102.043.002.ПЗ
| | КП.2015.ФЕКІ.102.043.002.ПЗ
|
Мінімізую Y1

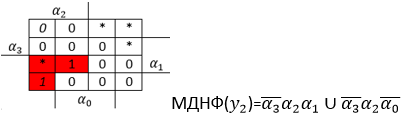
Мінімізую Y2
Мінімізую Y3

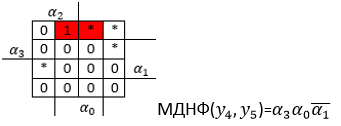
Мінімізую Y | КП.2015.ФЕКІ.102.043.002.ПЗ
| 4 та Y5
| КП.2015.ФЕКІ.102.043.003.Е3
|

| КП.2015.ФЕКІ.102.043.003.Е3
|
| Автомат керуючий. Схема електрична функціональна
|
| КП.2015.ФЕКІ.102.043.002.ПЗ
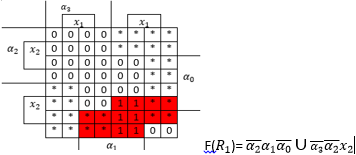
| 2.3 Реалізація системи булевих функцій f1,f2,f3 на ПЛМ
Виконуємо мінімізацію функцій f1,f2,f3, наведених у таблиці 1.1, методом діаграм Вейча:
F1 F2 F3




Реалізую мінімізовані функції на (n, p, k) – ПЛМ, де n=4 – кількість входів, p=3 – кількість виходів, k=9 – кількість кон’юнкцій.
Площа S=k*(n+p)= 63
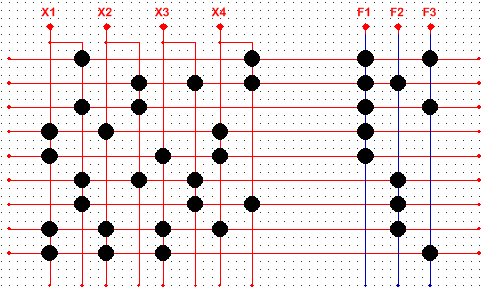
Рисунок 2.5. – Реалізація функцій на ПЛМ
| КП.2015.ФЕКІ.102.043.002.ПЗ
|
Date: 2016-01-20; view: 413; Нарушение авторских прав | Понравилась страница? Лайкни для друзей: |
|
|