Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Багатоконтурні системи
|
|
Для складних багатоємнісних об’єктів із численними внутрішніми зв’язками між координатами стану необхідно застосовувати автоматичні системи керування, в структуру яких додатково вводяться необхідні зв’язки та елементи.
Багатоконтурними системами називають такі, в структурі яких узгоджено функціонують два і більше автоматичних регуляторів та додаткових пристроїв. До таких систем відносяться:
- автономні;
- інваріантні;
- каскадні;
- з додатковими сигналами з проміжних точок.
Для кожної з цих систем необхідно визначити: структуру та параметри окремих елементів, а також оцінити можливість їх фізичної реалізації.
Автономні систем призначені для автоматизації об’єктів, які характеризуються взаємозв’язаними координатами чи вихідними величинами, що викликається внутрішніми зв’язками в об’єкті (рис.2.4). На структурній схемі показані регульовані змінні х1 та х2, кожна з яких сприймає сигнали „власного” та „чужого” регулятора відповідно через передаточні функції  та
та  .
.

Рис.2.4. структурна схема автономної системи
На схемі позначено:  - передаточні функції регуляторів;
- передаточні функції регуляторів;  - передаточні функції пристроїв компенсації (компенсаторів). Передаточні функції
- передаточні функції пристроїв компенсації (компенсаторів). Передаточні функції  та
та  характеризують прямі канали, передаточні функції - перехресні. Саме ці перехресні канали зв’язують через об’єкт регулювання кординати х1 та х2. Такі зв’язки приводять до того, що регулювання однієї з координат приводить до виникнення перехідних процесів по іншій, тобто перехресні зв’язки погіршують якість системи керування.
характеризують прямі канали, передаточні функції - перехресні. Саме ці перехресні канали зв’язують через об’єкт регулювання кординати х1 та х2. Такі зв’язки приводять до того, що регулювання однієї з координат приводить до виникнення перехідних процесів по іншій, тобто перехресні зв’язки погіршують якість системи керування.
Структуру і параметри системи із взаємозв’язаними координатами обирають так, щоб обидва контури були автоматичними (незалежними, сепаратними). Для цьго в структурну систему включають компенсатори з передаточними функціями  та
та  . На рис.2.4 компенсатори включені послідовно з автоматичними регуляторами, і через них здійснюється зв’язок між контурами системи. При заданій структурі системи необхідно визначити передаточні функції компенсаторів та їх параметри. Якщо під дією збурення Z змінюється кордината х1, це викликає перехідний процес по х2:
. На рис.2.4 компенсатори включені послідовно з автоматичними регуляторами, і через них здійснюється зв’язок між контурами системи. При заданій структурі системи необхідно визначити передаточні функції компенсаторів та їх параметри. Якщо під дією збурення Z змінюється кордината х1, це викликає перехідний процес по х2:
 (2.20)
(2.20)
Для того, щоб контури регулювання х1 та х2 були незалежними, необхідно, щоб вираз в дужках дорівнював нулю, це – умова автономності:
 (2.21)
(2.21)
Тоді передаточна функція компенсатора буде:
 (2.22)
(2.22)
Якщо прийняти для прикладу
 (2.23)
(2.23)
то
 (2.24)
(2.24)
тобто – це підсилювальна ланка.
Компенсатори можуть включатись також і паралельно з регуляторами, що визначається загальною структурою схеми, але в цьому випадку передаточна функція компренсатора включає передаточну функцію автоматичного регулятора:
 (2.25)
(2.25)
Вираз (2.25) реалізується більш складно, тому що фактично в системі працюють кілька ПІ – регуляторів.
Оцінка впливу одного контура на інші характеризується комплексним коефіцієнтом зв’язності:
 (2.26)
(2.26)
Значення  оцінюється при
оцінюється при  (статика) та при робочих значеннях частот контурів регулювання. При
(статика) та при робочих значеннях частот контурів регулювання. При  визначається відхилення коефіцієнтів по перехресних та прямих каналах, щоприводить до таких висновків:
визначається відхилення коефіцієнтів по перехресних та прямих каналах, щоприводить до таких висновків:
- при  об’єкт можна розглядати як однозв’язний, тобто контури практично не зв’язані між собою;
об’єкт можна розглядати як однозв’язний, тобто контури практично не зв’язані між собою;
- при  необхідно поміняти місцями прямі та перехресні (канали
необхідно поміняти місцями прямі та перехресні (канали  та
та  );
);
- при  необхідно розв’язувати канали.
необхідно розв’язувати канали.
При синтезі та впровадженні автономних систем необхідно враховувати можливість практичної реалізації  . Так при степені полінома чисельника m більше степені полінома знаменника n (m>n) точно передаточна функція не реалізується. В цьому випадку використовують наближені вирази, наприклад у вигляді диференціаторів.
. Так при степені полінома чисельника m більше степені полінома знаменника n (m>n) точно передаточна функція не реалізується. В цьому випадку використовують наближені вирази, наприклад у вигляді диференціаторів.
Виникає також проблема визначення параметрів настройки автоматичних регуляторів. В першому наближенні регулятори розраховуються без урахування перехресних зв’язків. Для уточнення настройок формуються так звані еквівалентні об’єкти: для одного з регуляторів виділяється частина системи, яка влючає відповідні передаточні функції власне об’єкта і другого регулятора.
Інваріантні системи призначені для об’єктів, які функціонують в умовах інтенсивних збурень. Інваріантність – часткова або повна незалежність будь-якої координати від збурення, що забезпечується введенням в систему відповідних зв’язків та елементів (компенсаторів). Теорія інваріантності (інваріант – математична величина, яка залишаеться постійною при різних перетвореннях) виникла в 40-х роках минулого століття і пов’язана з іменами видатних вчених Росії(проф. Щипанов Г.В., академіки Лузін Н.А., Кулебакін В.С., Петров Б.М.) та України – академіками Івахненко О.Г., Кухтенко О.І. та іншими. Ставилась задача компенсувати збурення, тобто
 (2.27)
(2.27)
або

Перші спроби побудувати „ідеальний” регулятор пов’язані з проф. Щипановим Г.В., який розробляв системи керування для літальних апаратів, але реалізувати умову (2.25) в одноконтурній системі неможливо, тому що це потребує збільшення коефіцієнта системи до значення  , що призводить до втрати стійкості. Крім того, датчик, регулятор, виконавчий механізм повинні бути безінерційними.
, що призводить до втрати стійкості. Крім того, датчик, регулятор, виконавчий механізм повинні бути безінерційними.
Практична реалізація інваріантних систем стала можливою лише після того, як акад. Петров Б.М. сформулював критерій реалізованості умов інваріантності, відомий, як критерій двоканальності: необхідною, але недостатньою умовою виконання умов інваріантності є наявність принаймі двох каналів передачі (розповсюдження) збурення між точками його прикладення і вихода об’єкта. Цей критерій виконується в класі комбінованих систем (рис.2.5)

Рис.2.5. Структура інваріантної системи
Крім автоматичного регулятора з передаточною функцією  система влючає компенсатор з передаточною функцією
система влючає компенсатор з передаточною функцією  . Збурення Z розповсюджується за каналами з передаточними функціями
. Збурення Z розповсюджується за каналами з передаточними функціями  і
і  , отже
, отже
 (2.28)
(2.28)
Умовою незалежності x від Z (умовою інваріантності) є:
 (2.29)
(2.29)
Звідки
 (2.30)
(2.30)
Вихід компенсатора може подаватись на вхід автоматичного регулятора, тоді:
 (2.31)
(2.31)
Для реалізації виразів (2.30), (2.31) може виникнути проблема у використанні диференціальних ланок високих порядків, тому доводиться розв’язувати проблему їх фізичної реалізуємості. Крім цого, в комбінованих системах необхідно вимірювати всі збурення, що практично нереально.
В залежності від вимог до умов функціонування об’єкта, структури системи в реальних умовах використовується такі види інваріантності:
- абсолютна, яка забезпечується умовою  ;
;
- повна (з точністю до перехідної складової), коли регульована координата не залежить від збурення Z, але початкові значення Z і його похідних викликають перехідну складову по координаті X;
- з точністю до малої величини  , коли значення абсолютної чи повної інваріантності неможливо або небажано;
, коли значення абсолютної чи повної інваріантності неможливо або небажано;
- часткова, коли координата Х не залежить лише від обмеженої кількості збурень Z або їх похідних.
Якщо об’єкт має запізнювання за каналами керування  і збурення
і збурення  , то при
, то при  пристрій компенсації не можна реалізувати фізично, тому що в цьому випадку керуючий вплив повинен випереджати збурення на час
пристрій компенсації не можна реалізувати фізично, тому що в цьому випадку керуючий вплив повинен випереджати збурення на час  , що неможливо.
, що неможливо.
Розробка інваріантних систем для реальних об’єктів передбачає виконання ряду етапів:
- формування структури систем з функціонально необхідних елементів і елементів корекції, визначення передаточних функцій розімкненої та замкненої систем;
- визначення структури комбінованої системи з основними (за збуренням) та допоміжними (за відхиленням) каналами;
- оцінювання характеристик збурень (математичного сподівання  , кореляційної функції
, кореляційної функції  , спектральної щільності
, спектральної щільності  і інші), виділення головних збурень;
і інші), виділення головних збурень;
- розрахунок замкнених (за відхиленням) контурів;
- визначення структури та параметрів компенсаторів на основі умов інваріантності (2.29). Для промислових систем можуть задаватись компенсатори з відомою структурою, наприклад:
 (2.32)
(2.32)
 (2.33)
(2.33)
 (2.34)
(2.34)
Параметри компенсаторів (2.32)÷(2.34) визначаються за наближеними формулами або номограмами.
Для об’єктів функціонування, яких характеризується кількома регульованими координатами, застосовуються каскадні системи (рис2.6)

Рис 2.6. Структура каскадної системи.
Каскадні системи мають основний регулятор з передаточною функцією  та допоміжний з передаточною функцією
та допоміжний з передаточною функцією  . При цьому вихід основного регулятора
. При цьому вихід основного регулятора  є завданням для допоміжного, але інерційність допоміжної змінної повинна бути значно меншою, ніж інерційність головної змінної Х. В цьому випадку змінна Х1 швидко реагує на високочастотні збурення, тобто компенсує внутрішні збурення, а зовнішній контур реагує на зовнішні низько-частотні збурення, в першу чергу на навантаження об’єкта. Прикладом може бути паралельна робота котлоагрегатів на спільний колектор. Тоді кількість внутрішніх контурів дорівнює кількості агрегатів. Основний регулятор діє як задатчик кожного з них при необхідності зміни режима роботи.
є завданням для допоміжного, але інерційність допоміжної змінної повинна бути значно меншою, ніж інерційність головної змінної Х. В цьому випадку змінна Х1 швидко реагує на високочастотні збурення, тобто компенсує внутрішні збурення, а зовнішній контур реагує на зовнішні низько-частотні збурення, в першу чергу на навантаження об’єкта. Прикладом може бути паралельна робота котлоагрегатів на спільний колектор. Тоді кількість внутрішніх контурів дорівнює кількості агрегатів. Основний регулятор діє як задатчик кожного з них при необхідності зміни режима роботи.
Існує кілька підходів до розрахунка каскадних систем. Якщо інерційність внутрішнього контура набагато менша інерційності основного контура, то розрахунок основного і допоміжного регуляторів можна проводити незалежно. Перехідні процеси у внутрішньому контурі в цьому випадку закінчуються раніше, ніж виникне нове збурення у зовнішньому контурі. Закони регулювання обираються так, щоб не створювати надлишкового астатизму, та забезпечити необхідну швидкодію і точність системи. Для регулятора внутрішнього контура (допоміжного) обирається П- або ПД-закони, для основного - ПІ- або ПІД.
Одним з ефективних методів розрахунку каскадних систем є формування так званого еквівалентного об’єкта. Для структури, зображеної на рис.2.6, справедливі такі співвідношення:
 (2.35)
(2.35)
Виключивши проміжні змінні  і
і  , отримаємо еквівалентний об’єкт для основного регулятора:
, отримаємо еквівалентний об’єкт для основного регулятора:
 (2.36)
(2.36)
На основі виразу (2.36) розраховується основний регулятор. При цьому в передаточну функцію еквівалентного об’єкта входить передаточна функція допоміжного регулятора  . При високій швидкості внутрішнього контура
. При високій швидкості внутрішнього контура
 (2.37)
(2.37)
Для розрахунку допоміжного регулятора формується свій еквівалентний об’єкт:
 (2.38)
(2.38)
Каскадні системи широко використовуються при автоматизації котлоагрегатів, наприклад регулятор тиску пари видає завдання регулятору тепловиділення, який оперативно реагує на зміни подачі палива.
Для забезпечення необхідної швидкодії та якості перехідних процесів застосовуються системи з додатковим сигналом з проміжної точки (рис.2.7)
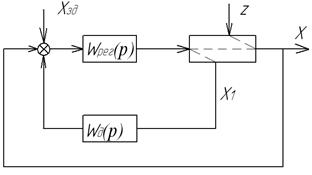
Рис.2.7. Структура системи з допоміжним сигналом
Додатковий сигнал формується як похідна від проміжної змінної Х1, для чого в систему вводиться диференціатор з передаточною функцією:
 (2.39)
(2.39)
Додатковий сигнал за похідною не вносить статичної похибки і формує вплив змінної Х1, коли вона починає змінюватись раніше, ніж координата Х. В таких системах частково компенсується запізнювання за каналом керування, яке є шкідливим, тому що погіршується умова компенсації збурень. Важливо врахувати, що допоміжний сигнал не залежить від абсолютного значення Х1, а виникає лише під час перехідних процесів, і в статиці дорівнює нулю.
Розрахунок систем з проміжним сигналом зводиться до визначення параметрів регулятора та диференціатора. В першому наближенні за часовими характеристиками визначаються:
 (2.40)
(2.40)

де  – постійні часу за основним та додатковим каналом,
– постійні часу за основним та додатковим каналом,  - відхилення змінних.
- відхилення змінних.
Date: 2016-02-19; view: 539; Нарушение авторских прав