Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Теоретическое введение. Колебательное движение является одним из наиболее распространённых движений в природе
|
|
Колебательное движение является одним из наиболее распространённых движений в природе. С ним связаны звуковые явления, переменный ток, электромагнитные волны. Колебания совершают отдельные части самых разнообразных машин и приборов, атомы и молекулы в твёрдых телах, жидкостях и газах, сердечные мышцы у человека и животных и т. п.
Колебанием называют физический процесс, характеризующийся повторяемостью во времени физических величин, связанных с этим процессом. Движение маятника или качелей, сокращения сердечной мышцы, переменный ток — всё это примеры систем, совершающих колебания.
Колебания считают периодическими, если значения физических величин повторяются через равные промежутки времени, называемые периодом Т. Число полных колебаний, совершаемых системой за единицу времени, называют частотой ν. Очевидно, что Т = 1/ν. Частота измеряется в герцах (Гц). При частоте 1 герц система совершает 1 колебание в секунду.
Простейшим видом колебательного движения являются свободные гармонические колебания. Свободными, или собственными называются колебания, происходящие в системе после того, как она была выведена из положения равновесия внешними силами, которые в дальнейшем участия в движении системы не принимают. Наличие периодически меняющихся внешних сил вызывает в системе вынужденные колебания.
Гармоническими называют свободные колебания, происходящие под действием упругой силы при отсутствии трения. Согласно закону Гука, при малых деформациях сила упругости прямо пропорциональна смещению тела х от положения равновесия и направлена к положению равновесия: Fупр. = — κх, где κ — коэффициент упругости, измеряемый в Н/м, а x — смещение тела из положения равновесия.
Силы, не упругие по своей природе, но аналогичные по виду зависимости от смещения, называют квазиупругими (лат. quasi — якобы). Такие силы также вызывают гармонические колебания. Например, квазиупругие силы действуют на электроны в колебательном контуре, вызывая гармонические электромагнитные колебания. Примером квазиупругой силы может также служить составляющая силы тяжести математического маятника при малых углах отклонения его от вертикали.
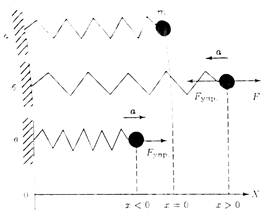
рис. 1
Уравнение гармонических колебаний. Пусть тело массой m прикреплено к концу пружины, масса которой мала по сравнению с массой тела. Колеблющееся тело называют осциллятором (лат. oscillum— колебание). Пусть осциллятор может свободно и без трения скользить вдоль горизонтальной направляющей, по которой направим ось координат ОХ (рис. 1). Начало координат поместим в точке, соответствующей равновесному положению тела (рис. 1, а). Приложим к телу горизонтальную силу F и сместим его из положения равновесия вправо в точку с координатой х. Растяжение пружины внешней силой вызывает появление в ней силу упругости Fynp., направленной к положению равновесия (рис. 1, б). Если теперь убрать внешнюю силу F, то под действием силы упругости тело приобретает ускорение а, движется к положению равновесия, а сила упругости уменьшается, становясь равной нулю в положении равновесия. Достигнув положения равновесия, тело, однако, в нем не останавливается и движется влево за счёт своей кинетической энергии. Пружина вновь сжимается, возникает сила упругости, направленная вправо. Когда кинетическая энергия тела перейдет в потенциальную энергию сжатой пружины, груз остановится, затем начнет двигаться вправо, и процесс повторяется.
Таким образом, если при непериодическом движении каждую точку траектории тело проходит только один раз, двигаясь в одном направлении, то при колебательном движении за одно полное колебание в каждой точке траектории, кроме самых крайних, тело бывает дважды: один раз двигаясь в прямом направлении, другой раз —в обратном.
Напишем второй закон Ньютона для осциллятора: ma = Fynp., где
Fупр = –κ x (1)
Знак «–» в формуле указывает на то, что смещение и сила имеют противоположные направления, иными словами, сила, действующая на прикрепленный к пружине груз, пропорциональна смещению его из положения равновесия и направлена всегда к положению равновесия. Коэффициент пропорциональности «κ» носит название коэффициента упругости. Численно он равен силе, вызывающей деформацию пружины, при которой её длина изменяется на единицу. Иногда его называют коэффициентом жёсткости.
Так как ускорение есть вторая производная от смещения тела, то это уравнение можно переписать в виде
 , или
, или  (2)
(2)
Уравнение (2) может быть записано в виде:
 , (3)
, (3)
где обе части уравнения разделены на массу m и введено обозначение:
 (4)
(4)
Легко проверить подстановкой, что этому уравнению удовлетворяет решение:
х = А0 cos (ω0t + φ0), (5)
где А0 — амплитуда или максимальное смещение груза от положения равновесия, ω0 — угловая или циклическая частота, которая может быть выражена через период Т собственных колебаний формулой  (см. ниже).
(см. ниже).
Величину φ = φ0 + ω0t (6), стоящую под знаком косинуса и измеряемую в радианах, называют фазой колебания в момент времени t, а φ0 — начальная фаза. Фаза представляет собой число, определяющее величину и направление смещения колеблющейся точки в данный момент времени. Из (6) видно, что
 . (7)
. (7)
Таким образом, величина ω0 определяет быстроту изменения фазы и называется циклической частотой. С обычной чистотой её связывает формула
ω0=2πν (8)
Если фаза изменяется на 2π радиан, то, как известно из тригонометрии, косинус принимает исходное значение, а следовательно, исходное значение принимает и смещение х. Но гак как время при этом изменяется на один период, то получается, что
ω0 (t + T) + φ0 = (ω0t + φ0) + 2π
Раскрывая скобки и сокращая подобные члены, получим ω0 T = 2π или  . Но так как из (4)
. Но так как из (4)  , то получим:
, то получим:  . (9)
. (9)
Таким образом, период колебания тела, подвешенного на пружине, как это следует из формулы (8), не зависит от амплитуды колебаний, но зависит от массы тела и от коэффициента упругости (или жесткости) пружины.
Дифференциальное уравнение гармонических колебаний: ,
• Собственная круговая частота колебаний, определяемая природой и параметрами колеблющейся системы:
–  — для материальной точки массой m, колеблющейся под действием квазиупругой силы, характеризующейся коэффициентом упругости (жёсткости) k;
— для материальной точки массой m, колеблющейся под действием квазиупругой силы, характеризующейся коэффициентом упругости (жёсткости) k;
–  — для математического маятника, имеющего длину l;
— для математического маятника, имеющего длину l;
–  — для электромагнитных колебаний в контуре с емкостью С и индуктивностью L.
— для электромагнитных колебаний в контуре с емкостью С и индуктивностью L.
ВАЖНОЕ ЗАМЕЧАНИЕ
Эти формулы верны при малых отклонениях от положения равновесия.
• Скорость при гармоническом колебании:
 .
.
• Ускорение при гармоническом колебании:

• Полная энергия гармонического колебания:
 .
.
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
Задание 1
Определение зависимости периода собственных колебаний пружинного маятника от массы груза
1. Подвесьте к одной из пружин груз и выведите маятник из положения равновесия примерно на 1 — 2 см.
2. Предоставив грузу свободно колебаться, измерьте секундомером промежуток времени t, в течение которого маятник совершит n (n = 15 — 25) полных колебаний  . Найдите период колебания маятника, разделив измеренный вами промежуток времени на число колебаний. Для большей точности проведите измерения не менее 3 раз и вычислите среднее значение периода колебания.
. Найдите период колебания маятника, разделив измеренный вами промежуток времени на число колебаний. Для большей точности проведите измерения не менее 3 раз и вычислите среднее значение периода колебания.
Примечание: Следите за тем, чтобы боковые колебания груза отсутствовали, т. е. чтобы колебания маятника были строго вертикальными.
3. Повторите измерения с другими грузами. Результаты измерений запишите в таблицу.
| № измерения | m (кг) | n | t (с) | T (с) | T2 (с2) |
4. Постройте зависимость периода колебаний маятника от массы груза. График будет более простым (прямая линия), если на горизонтальной оси откладывать значения маcсы грузов, а на вертикальной оси — значения квадрата периода.
Задание 2
Определение коэффициента упругости пружины динамическим методом
1. Подвесьте к одной из пружин груз массой 100 г., выведите его из положения равновесия на 1 — 2 см и, измерив время 15 — 20 полных колебаний, определите период колебания маятника с выбранным грузом по формуле . Из формулы  вычислите коэффициент упругости пружины.
вычислите коэффициент упругости пружины.
2. Проделайте аналогичные измерения с грузами от 150 г до 800 г (в зависимости от оборудования), определите для каждого случая коэффициент упругости и подсчитайте среднее значение коэффициента упругости пружины. Результаты измерений запишите в таблицу.
Задание 3. По результатам лабораторной работы (задания 1 — 3):
– найдите значение циклической частоты маятника ω0.
– ответьте на вопрос: зависит ли амплитуда колебаний маятника от массы груза.
Возьмите на графике, полученном при выполнении задания 1, произвольную точку и проведите из неё перпендикуляры до пересечения с осями Om и OT 2. Определите для этой точки значения m и T 2 и по формуле вычислите величину коэффициента упругости пружины.
Date: 2015-05-19; view: 813; Нарушение авторских прав