Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Постановка задачи. Необходимо разработать систему управления шаговым двигателем, способную реализовывать прямое и обратное вращение ротора
|
|
Необходимо разработать систему управления шаговым двигателем, способную реализовывать прямое и обратное вращение ротора, а также обрабатывать сигнал экстренной остановки двигателя. Для имитации входных сигналов управления используются тумблеры X4 - X7. Входы контроллера X0 – X3 соединены с четырьмя герконами, имитирующими конечные выключатели. Сигналы включения прямого и обратного хода (FWD и REV) должны быть представлены в виде импульса, а сигнал STOP должен обеспечивать полную остановку системы. Система должна запускаться только в том случае, когда нет сигнала STOP, и поступил сигнал на перемещение вперед либо назад.
Стоит обратить внимание на тип входа при программировании. Нормально разомкнутые контакты -| |- и нормально замкнутые -|/|- можно одновременно использовать в разных частях программы применительно к одному и тому же физическому входу. К тому же грамотный подход к выбору типа контакта позволяет упростить решение множества вопросов. Например, связка -| |--|/|- позволяет системе работать только когда активен первый вход и неактивен второй (исключается работа системы при одновременной подаче противоречивых сигналов FWD и REV).
Сигнал STOP в реальных системах практически всегда является размыкающим и аппаратно отключает питание. Это необходимо помнить, однако в данной лабораторной работе тип контакта STOP не имеет особого значения т. к. этот сигнал обрабатывается на программном уровне.
Последовательное переключение обмоток с заданным интервалом времени можно реализовать множеством способов. Самый простой – последовательность таймеров, каждый из которых, по истечению времени, включает следующую комбинацию обмоток и следующий таймер. Подобное решение связано с рядом неудобств. Во-первых, реализация реверсивного хода приведет к увеличению объема программы, практически вдвое. Во-вторых, усложняется процесс определения стартовой комбинации включенных обмоток при переключении направления вращения.
Для увеличения «гибкости» программы может быть использован подход на основе динамически изменяемого регистра. В регистр записывается десятичное число, которое изменяется на единицу каждый раз при срабатывании таймера задержки (время между полушагами). Изменение значения регистра должно происходить в пределах 0 – 7 (т.к. при полушаговом управлении имеется всего 8 возможных комбинаций включенных обмоток – см. табл.1). В этом случае структура программы может выглядеть следующим образом (рис. 3).
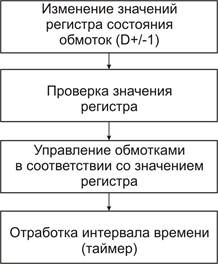
Рисунок 3 – Структура программы управления шаговым двигателем
В процессе выполнения работы необходимо:
а) ознакомиться с технической документацией,
б) ознакомится с пакетом GX-Developer v8,
в) разработать алгоритм и программу на языке LD,
г) при участии преподавателя или инженера, записать программу в контроллер и проверить ее работоспособность.
Содержание отчета
Лабораторная работа может считаться выполненной успешно при наличии оформленного протокола (отчета), практической реализации требуемого алгоритма управления, умении выполнять разработку и редактирование программы контроллера в среде GX-Developer v8, а так же записывать ее в контроллер.
Протокол лабораторной работы должен содержать следующие разделы:
1. Цель работы.
2. Схема управляемой системы, с указанием сигналов и входов/выходов контроллера.
3. Алгоритм решения поставленной задачи.
4. Описание концепции решения и основных используемых элементов (кратко).
5. Выводы по работе.
Контрольные вопросы
1. Укажите основные способы управления шаговым двигателем.
2. Поясните фрагмент алгоритма, в котором выполняется управление обмотками двигателя.
3. Приведите типовую последовательность действий, выполняемых контроллером в пределах одного программного цикла.
4. Каким образом в алгоритме обеспечивается корректное продолжение движения после команды STOP.
5. Объясните назначение и работу таймера в программе управления двигателем.
Date: 2015-05-09; view: 501; Нарушение авторских прав