Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Классификация винтовых двигателей
|
|
Винтовые забойные двигатели могут быть классифицированы по следующим признакам:
1. По кратности действия рабочих органов различают двигатели с однозаходным ротором (Ζ2 = 1) и многозаходные двигатели (Ζ1 > 1), в которых ротор и статор имеют многозаходные винтовые поверхности. Кратность действия определяет число циклов в рабочих камерах гидромашины за один оборот вала. Цикл одновинтовой гидромашины соответствует процессу вытеснения объема замкнутой камеры (шлюза) и совершается на периоде между контактом смежных зубьев ротора с фиксированной впадиной статора.
Кратность действия, зависящая от кинематического отношения рабочих органов, равна числу заходов внутреннего элемента Ζ2 и определяет рабочий объем винтового героторного механизма.

Рисунок 10. Зависимости выходных параметров винтовых забойных двигателей диаметром 172 мм от кинематического соотношения героторного механизма (Q=const,Δp=const).
Кратность действия является основным параметром винтового забойного двигателя, что иллюстрируется теоретическими кривыми (рис. 10), повсеместно используемыми при обосновании выбора рабочих органов винтового забойного двигателя. Отечественные винтовые забойные двигатели имеют многозаходные рабочие органы. Зарубежные компании производят двигатели как с однозаходным ротором, так и с многозаходными рабочими органами.
2. По кинематике рабочих органов. Согласно классификации винтовых героторных механизмов, для осуществления рабочего процесса необходимо и достаточно, чтобы кинематика ротора и статора соответствовала одному из четырех вариантов взаимодействия, приведенных на рис. 11.
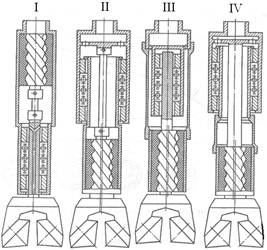
Рисунок 11. Варианты взаимодействия ротора и статора винтового героторного механизма.
Компоновка двигателя во многом определяется конструктивными средствами, обеспечивающими возможность выполнения планетарного движения одного из элементов рабочих органов. Наиболее распространен вариант I компоновки, характеризующийся неподвижным наружным элементом и планетарно-вращающимся внутренним. Этот вариант имеет следующие преимущества:
- разделение полостей высокого и низкого давления осуществляется внутри рабочих органов, т.е. не требуется каких-либо дополнительных сальниковых устройств;
- имеется возможность непосредственно соединять статор с колонной бурильных труб (реактивный момент на статоре закручивает резьбовые соединения бурильных труб). Двигатели с рабочими органами по варианту II, целесообразно применять в компоновках низа бурильной колонны (КНБК), предназначенных для поддержания вертикальности скважины или при необходимости расширения ствола, поскольку на наружной поверхности вращающегося статора весьма просто разместить опорно-центрирующие или режущие элементы. Однако этот вариант имеет существенный недостаток - необходимость уплотнения между неподвижным корпусом и вращающимся статором.
На практике вариант II компоновки был использован французской фирмой "Schlumberger" в двигателе "Gerotor", а также в экспериментальном отечественном двигателе для стабилизации КНБК без вращения колонны бурильных труб.
В начале 70-х годов ВНИИБТ предложил конструкцию винтового забойного двигателя с подвижным статором, кинематически аналогичную варианту III. От известных двигателей он отличается тем, что соединение подвижного статора и колонны бурильных труб выполнено в виде гибкой трубы. Компоновка забойного двигателя позволяет использовать в качестве гибкой трубы элемент бурильной колонны.
Практическое применение варианта IV компоновки пока неизвестно, хотя теоретически использование его может способствовать повышению эффективности разрушения горных пород и увеличению скорости бурения.
3. По конструктивной компоновке различают шпиндельные и бесшпиндельные двигатели. Большая часть двигателей выпускается в шпиндельном исполнении, с вынесением осевой и радиальных опор в отдельный автономный узел, расположенный под рабочими органами. Таким образом, конструктивная схема винтового двигателя аналогична турбобурной схеме.
Принципиально возможны конструкции двигателей в бесшпиндельном исполнении. Наиболее актуальна такая компоновка для двигателей с ограниченным осевым габаритом т.е. двигатели малого диаметра. Собственно, как дальше будет показано, в винтовых двигателя используются радиальные и осевые опоры, используемые в турбобурах и это естественно.
4. По конструкции силовой секции (секции где располагаются рабочие органы) различают монолитные и секционные двигатели. В большинстве случаев рабочие органы двигателей выполняются в монолитном исполнении длиной в 2-3 шага статора. Секционные двигатели характеризуются последовательным расположением стандартных рабочих органов. Роторы секционных двигателей обычно соединяются между собой посредством гибких валов или шарниров, статоры - резьбовыми переводниками. Основная цель секционирования - повышение крутящего момента двигателя или снижение контактных напряжений в рабочих органах.
В ряде случаев при создании многошаговых конструкций рабочих органов используются модульные варианты. Так, двигатель типа ДММ имеет составной статор, выполненный из нескольких втулок, собранных в корпусе, и составной ротор, набранный из модулей, закрепленных на общем вале.
По конструкции секционных двигателей различают безориентированные и ориентированные модификации. При ориентированной сборке секции соединяются таким образом, что они образуют единую винтовую нарезку и в идеале подобны монолитным рабочим органам. Преимущество ориентированного соединения секций - снижение межвиткового перепада давления и перекашивающего момента.
5. По характеру распределения потока жидкости различают двигатели обычные и с разделенным потоком. Разделенный поток используется в схемах винтовых забойных двигателей, когда по технологическим соображениям необходимо часть жидкости пропустить через полый ротор, минуя камеры рабочих органов, и в схемах с параллельным соединением секций рабочих органов.
6. По конструкции ротора рабочих органов различают двигатели с цельным и полым ротором. Двигатели с наружным диаметром 88 мм и более, как правило, выполняются с полым ротором. Такое исполнение позволяет разместить в расточке ротора гибкий вал, а также снизить инерционные силы в машине.
Двигатели с наружным диаметром менее 88 мм выполняются с цельным ротором. Однако с развитием прогрессивных технологий (гидроштамповка, горячая прокатка) в будущем не исключено использование полых роторов во всех типоразмерах двигателей.
7. По конструкции узла соединения ротора и вала шпинделя винтового забойного двигателя выполняются в двух вариантах: шарнирном или торсионном (с гибким валом).
Первые отечественные двигатели (Д2-172М, ДЗ-172) оснащались двухшарнирными соединениями. В настоящее время почти во всех двигателях используются гибкие валы. В некоторых случаях в двигателях с большим перекосом осей (более 1,5°) силовой и шпиндельной секций для повышения надежности используется комбинированная шарнирно-торсионная компоновка.
8. По конструкции шпинделя различают винтовые забойные двигатели с открытым и маслозаполненным шпинделем. В открытых шпинделях (они используются во всех серийных отечественных двигателях) узлы трения смазываются и охлаждаются буровым раствором. В маслонаполненных шпинделях узлы трения находятся в масляной ванне с избыточным давлением на 0,1-0,2 МПа, превышающим давление окружающей среды.
9. По типу осевой опоры в шпинделе различают забойные двигатели с опорами качения и скольжения. Опоры качения выполняются в виде многоступенчатых радиально-упорных или упорных шарикоподшипников. Опоры скольжения представлены многорядными упорными подшипниками. В отечественных конструкциях используется пара "обрезиненный подпятник - металлический диск", т.е. осевую опору, которая в турбобуре называется пятой-сальником. Однако наибольшее распространение получил винтовой забойный двигатель с осевыми опорами качения.
10. По конструкции уплотнения вала шпинделя различают шпиндели с торцевыми и многорядными лабиринтными уплотнениями. Уплотнения вала устанавливаются для обеспечения эффективной работы гидромониторных работ.
11. По назначению различают двигатели:
- универсального применения (общего назначения);
- для наклонно направленного бурения;
- для горизонтального бурения;
- для ремонта скважин (буровых работ внутри обсадных колонн и насосно-компрессорных труб);
- специального применения (например, двигатели для горизонтального бурения с вращением КНБК).
12. По наружному диаметру выделяют винтовые забойные двигатели:
- обычного исполнения (диаметром 127 мм и более);
- малогабаритные (диаметром от 54 до 127 мм);
- миниатюрные (диаметром менее 54 мм).
13. По термостойкости различают двигатели:
- в обычном исполнении для температуры до 100 °С;
- термостойкие, предназначенные для бурения при забойной температуре 120-150 °С.
Термостойкость винтового забойного двигателя определяется физико-химическими свойствами эластичной обкладки статора клея, обеспечивающего крепление обкладки с металлом. Для повышения термостойкости винтового забойного двигателя используются специальные эластомеры, а также особые конструкции статоров, например со шлицевым креплением обкладки. В отечественной практике термостойкие двигатели серийно не выпускаются. За рубежом ряд компаний предлагают винтовые забойные двигатели, предназначенные для работы в условиях забойной температуры до 150 °С.
14. По частоте вращения выходного вала различают двигатели:
- обычные (n = 80-150 об/мин);
- быстроходные (n > 150 об/мин);
- тихоходные (n < 80 об/мин).
К обычным двигателям относятся двигатели типа Д в габарите 127-240 мм, к быстроходным - двигатели в габарите 54-88 мм. Тихоходные двигатели встречаются редко, к ним относится одна из модификаций двигателя ДК-108.
15. По типу механизма искривления различают винтовой забойный двигатель с:
- кривым переводником с одним перекосом осей;
- кривым переводником с двумя перекосами осей (двигатель DTU фирмы "Baker Hughes");
- регулируемым на поверхности кривым переводником (на устье скважины или в цеху);
- регулируемым на забое кривым переводником (система "Telepilot" Французского института нефти);
- шарнирным переводником.
Наибольшее распространение получили двигатели с переводником, расположенным между силовой и шпиндельными секциями.
16. По роду рабочего агента известны двигатели, использующие жидкость (вода, глинистый раствор), воздух или газ, газожидкостную смесь.
17. По типу зацепления профилей рабочих органов различают двигатели с гипо- и эпициклоидальным зацеплением. Наибольшее распространение получили двигатели с гипоциклоидальным зацеплением рабочих органов.
Конструкции винтовых двигателей
Выпускаемые в нашей стране винтовые двигатели выполнены по единой компоновочной схеме и имеют неподвижный статор и планетарно – вращающийся ротор.
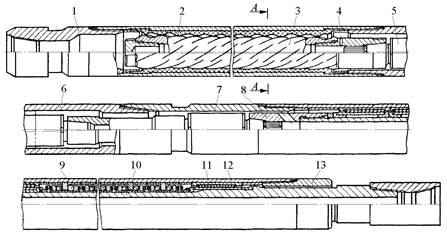
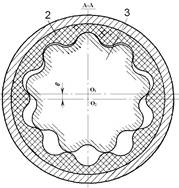
Рисунок 12. Винтовой забойный двигатель Д2 – 172М.
1, 6, 7 – верхний, средний и нижний переводники; 2 – статор; 3 – ротор; 4 – распорное кольцо; 5 – двухшарнирное соединение; 8 – соединительная муфта; 9 – многорядная упорная шаровая опора; 10 – вал шпинделя; 11 – радиальный подшипник; 12 – корпус шпинделя; 13 – ниппель.
На рис. 12 показано устройство винтового забойного двигателя Д2 – 172М в продольном и поперечном разрезах.
Двигатель состоит из трех основных узлов: секции двигательной, секции шпинделя и клапана (на рис. 12 не показан), которые соединяются между собой с помощью замковых резьб.
Секция двигательная включает статор 2 и ротор 3, двухшарнирное соединение 5 и корпусные переводники 6 и 7. Рабочие органы, ротор и статор представляют собой зубчатую пару с внутренним косозубым зацеплением (винтовой героторный механизм) с разницей в числах зубьев, равной единице.
Статор 2 имеет десять внутренних винтовых зубьев левого направления, выполненных из эластомера, привулканизированной к расточке корпуса.
Ротор 3, на наружной поверхности которого нарезаны девять винтовых зубьев левого направления, выполняется из коррозионностойкой стали или из конструкционной стали с хромированием зубьев. Ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине высоты зуба.
Рабочие органы являются самыми ответственными деталями двигателя и должны отвечать определенным, высоким требованиям. В частности, для обеспечения нормальной работы двигателя отклонения образующих зубьев статора и ротора от прямолинейности не должны превышать 0,3 мм. Обкладка статора должна быть надежно прикреплена к его корпусу, а рабочая поверхность резины не должна иметь дефектов (трещин, расслоений и др.). Для повышения прочности крепления концевых участков?????
Date: 2015-05-05; view: 1931; Нарушение авторских прав