Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Рабочие характеристики асинхронного двигателя
|
|
Рабочие характеристики асинхронного двигателя представляют собой зависимость скорости вращения n2, коэффициента полезного действия η, коэффициента мощности cosφ, скольжения s, вращающего момента M и тока в цепи статора I1 от нагрузки (полезной мощности) на валу двигателя P2 при постоянном номинальном напряжении и неизменной частоте сети ( рис. 3.).
Основной характеристикой двигателя является зависимость частоты вращения ротора от момента сопротивления на валу (от нагрузки), т.е. механическая характеристика. Рабочими характеристиками двигателя являются зависимости:
М = f1(Р2); I1 = f2(Р2); Соsj1 = f3(Р2);
h = f4(Р2); n2=f5(Р2); (4)
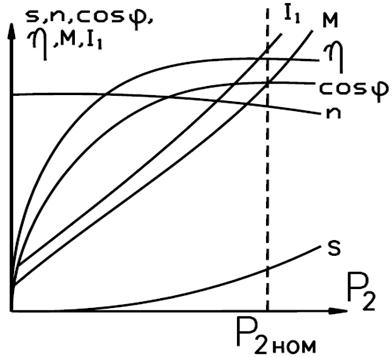
Рис. 3.
При построении рабочих характеристик используются соотношения:
Р2 = 0,104 * М * n2; h = Р2/Р1 * 100 %; cos j1 = P1/(Ö3 * U1 * I1); (5)
где: Р2 - полезная механическая мощность на валу;
Р1 - мощность, потребляемая из сети;
I1 - линейный ток, потребляемый двигателем из сети;
М - момент на валу;
Сosj1 - коэффициент мощности двигателя;
h - КПД двигателя;
U1 - линейное напряжение сети.
У асинхронного двигателя, как и у большинства машин, коэффициент полезного действия (КПД) с ростом нагрузки возрастает η=ƒ(Р2), ввиду уменьшения доли электрических и магнитных потерь по отношению к развиваемой мощности двигателя. Однако, при достижении нагрузки 75% от номинальной, заметно возрастают и электрические потери (в обмотках статора и ротора), пропорциональные квадрату тока потребляемого двигателем, что ведет в дальнейшем с увеличением нагрузки к некоторому уменьшению КПД.
Коэффициент мощности cosφ зависит от соотношения между активной мощностью Р1, потребляемой двигателем, и полной мощностью S, складывающейся из активной Р1 и реактивной Q составляющих:
cosφ =  (6)
(6)
При увеличении нагрузки растет величина активной мощности Р1, что приводит к росту cosφ, достигающего максимального значения (0,7-0,9) при номинальной нагрузке на двигатель. В дальнейшем возможно уменьшение cosφ, в связи с увеличением реактивной мощности, связанной с усилением потоков рассеяния.
Механическая характеристика и саморегулирование двигателя.
График, связывающий между собой механические величины - скорость и вращающий момент, называется механической характеристикой асинхронного двигателя (рис. 4.) n=ƒ(M). Саморегулирование асинхронного двигателя заключается в следующем. Пусть двигатель работает устойчиво в каком-то режиме, развивая скорость n1 и вращающий момент М1. При равномерном вращении этот момент равен тормозному моменту Мт1, т.е.
М1=Мт1, n1= const.
Рис. 4.
Увеличение тормозного момента до Мт2, вызовет уменьшение оборотов машины, так как тормозной момент станет больше вращающего момента.
С уменьшением оборотов увеличивается скольжение, что в свою очередь вызывает возрастание ЭДС и тока в роторе. Благодаря этому увеличивается вращающий момент двигателя.
Этот процесс заканчивается тогда, когда вращающий момент М2, развиваемый двигателем, станет равным Мт2. При этом, устанавливается скорость вращения меньшая, чем n1. Свойство автоматического установления равновесия между тормозным и вращающим моментами называется саморегулированием.
Момент сопротивления (тормозящий момент) на валу двигателя создается генератором постоянного тока (ГПТ).
При питании ОВ генератора от постоянного источника возникает ток возбуждения IВ, создающий основное магнитное поле машины Ф.
Чаще всего используют два способа включения ОВ - к независимому источнику питания (независимое возбуждение) и параллельно цепи якоря генератора (параллельное возбуждение).
Вал якоря ГПТ, будучи соединенным с валом асинхронного двигателя, приводится им во вращение, в результате чего индуцируется в обмотках якоря ЭДС Е, а на выходе генератора появляется напряжение U, питающее нагрузку генератора, ток цепи якоря Iя взаимодействует с магнитным полем возбуждения Ф и создает тормозящий моментМ:
М = СМ * Ф * IЯ (7)
где: СМ - конструктивный коэффициент машины.
Величина тормозящего момента зависит от величины нагрузки генератора и, следовательно, от IЯ и от тока возбуждения IВ, создающего магнитный поток Ф.
Основные характеристики генератора:
а) характеристика холостого хода: Е = f6(IВ);
б) внешняя характеристика: U = f7(I);
где: I - ток в нагрузке генератора.
2. Методика эксперимента.
В соответствии со стандартами на испытание двигателей создать нагрузку на валу можно тарированным двигателем постоянного тока, работающем в режиме генератора. В этом случае полезную мощность P2 можно рассчитать как:
 (8)
(8)
где PЭЛ – электрическая мощность, выделяемая в нагрузке;
η Г – КПД генератора постоянного тока;
UГ – напряжение на нагрузке генератора;
IГ – ток нагрузки генератора.
Кривая КПД, как функция полезной мощности от коэффициента нагрузки β=PЭЛ/PЭЛ (PЭЛн – номинальное значение электрической мощности), представлена на рис. 5. Возрастание кривой КПД при малых значениях полезной мощности объясняется низкими значениями потерь короткого замыкания. С ростом нагрузки влияние потерь короткого замыкания возрастает (эти потери зависят от квадрата тока нагрузки), и рост КПД замедляется.
После достижения максимального значения КПД уменьшается и становится равным нулю в режиме короткого замыкания. В генераторах постоянного тока максимальное значение КПД достигается, как правило, при β = 0.7…0.8.
Максимальное значение коэффициента полезного действия машин постоянного тока мощностью более 10 кВт составляет 0,85…0,96, причём большие значения соответствуют машинам большей мощности. У машин мощностью до 50 Вт он существенно меньше и составляет всего 0,15…0,5.
В первом приближении можно считать, что КПД нагружаемого генератора постоянно и равно 0,7. Такое допущение приведет к значительной ошибке определения полезной мощности на валу только в режимах, близких к режиму холостого хода (расчетное значение P2 будет занижено).
Рис. 5.
С увеличением нагрузки эта ошибка будет уменьшаться.
Исследование режимов работы асинхронного двигателя проводятся на модульном учебном комплексе МУК-ЭП1, который состоит из:
− блока питания двигателя постоянного тока БПП1;
− блока питания асинхронного двигателя БПА1;
− электромашинного агрегата МА1-АП.
В качестве исследуемого асинхронного двигателя с короткозамкнутым ротором использован АИР63А4 (220 В, 0.25 кВт, 1395 об./мин.). Автоматическая коммутация обмоток двигателя и подключение измерительных приборов к нему осуществляется в блоке БПА1.
В качестве нагрузки использован двигатель постоянного тока ПЛ073У3 (220 В, 180 Вт, 1500 об./мин.). Автоматическая коммутация обмоток двигателя и подключение измерительных приборов осуществляется в блоке БПП1.
При работе с комплексом МУК-ЭП1 необходимо соблюдать следующую инструкцию.
Date: 2015-05-04; view: 2086; Нарушение авторских прав