Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Сервоконтроллеры имеющие отдельное законченное исполнение
|
|
Обзор сервоконтроллеров
Контроллер движения
Сервоконтроллер представляет собой микропроцессорное устройство, способное управлять движением по заданной траектории в реальном масштабе времени. Это устройство может быть одно- или многоосевым (то есть может управлять движением одной или нескольких осей одновременно). Программирование сервоконтроллера производится с помощью обычного персонального компьютера (ПК) на языке программирования, уникальном для данного контроллера. Загруженная программа в сервоконтроллер остается в памяти и управляет работой системы. Результатом работы сервоконтроллера является выдача управляющих сигналов на электропривод в какой-либо форме: обычно это аналоговое напряжение/ток (±10В, 4..20мА, 0..20 мА и т.д.) которое пропорционально требуемой скорости, перемещению или крутящему моменту. В соответствии с сигналами обратной связи от датчиков положения происходит корректировка траектории движения исполнительного механизма.
При обзоре распространенных сервоконтроллеров выделим 2 группы:
- Сервоконтроллеры имеющие отдельное законченное исполнение
- Программно-аппаратные сервоконтроллеры интегрированные в сервопривод
Сервоконтроллеры имеющие отдельное законченное исполнение
Наиболее распространенные сервоконтроллеры относящиеся к этой группе предназначены для установки в системы типа PCNC (Personal Computer Numerical Control). В такой системе сигналы обратной связи помимо сервопривода замыкаются на плату сервоконтроллера, а сигналы задания на привод поступают индивидуально на каждый через каналы ЦАП. Задачи контурного управления полностью вынесены на сервоконтроллер.
Приведенный табл. 2. обзор наиболее распространенных сервоконтроллеров показывает, что наиболее перспективные сервоконтроллеры оснащены 64-битными микроконтроллерами с плавающей запятой, широким спектром различных видов интерполяции, а также большим числом дискретных входов/выходов (см. рис. 1). Одним из наиболее важных преимуществ таких модулей является отсутствие необходимости в доукомплектовании системы управления дополнительными модулями ввода/вывода. Однако стоимость таких сервоконтроллеров в некоторых случаях (в зависимости от оснащения) достигает 2000 – 3000 $. Ввиду этого при построении простых систем управления сервосистемами наиболее предпочтительным является использование дешевых сервоконтроллеров с малым набором функций в сочетании с недорогими модулями ввода/вывода,
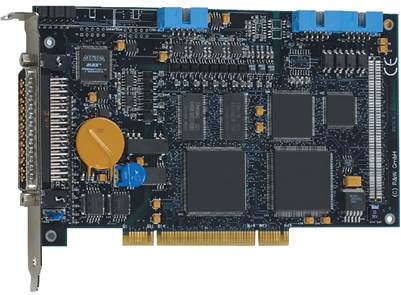
Рис. 3. Сервоконтроллер APCI-8001 фирмы ADDI-DATA.

Рис. 4. Сервоконтроллер SERVO-300 фирмы ICP DAS
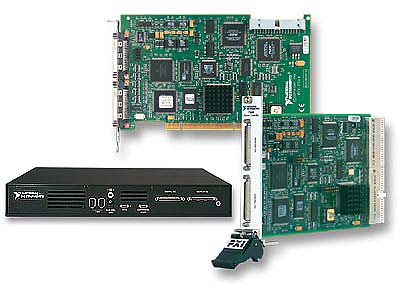
Рис. 5. Сервоконтроллеры фирмы National Instruments
Табл. 1.
| Модель | Интерполяция | Кол-во осей | Интерфейсы связи с ПК | Коммуникации | Тип сигнала ОС ДП | Дискретные входы/выходы (аналоговые) | CPU | Память | Диапазон перемещений | Дополнительно |
| ADVANTECH, PCI-1241 | Линейная, круговая | PCI | ЦАП 16 bit | TTL (2МГц) | 13 / 5 | --- | --- | 32 бит | Утилиты диагностики и конфигурирвоания. Разъемы: SCSI-II 68-pin | |
| ADDI-DATA, APCI-8001 | Линейная, круговая, сплайн, CAD-интерполяция, T/S-curve acceleration and deceleration, Point-to-point movement | PCI | ЦАП 16 bit / Step-Dir / INTERBUS / CAN (no CAN open) | TTL (10МГц) /SSI | 16 / 8 | 64-bit RISC processor 150 MHz, Floating point | 32МБ | 32 бит | Разъемы: 50-pin SUB-D male connector. Драйвера под Win 9x/NT/200, Linux. Автоматическая отработка откомпилированных пользовательских программ. Поддержка управления шаговых двигателей. Примеры программирования на Delphi, Borland C. | |
| PMC (Precision MicroControl), MultiFlex PCI 1440 | Линейная, круговая, сплайн-интерполяция, point-to-point & coordinated motion, Trapezoidal, S-curve and parabolic profiles | 4, 8 | PCI | ЦАП 16 bit | TTL (5МГц) | 16 / 16 (8 АЦП 14bit) | 64-bit RISC processor, Floating point | 16 Mbytes Dynamic RAM. 512 Kbytes Flash ROM | 32 бит | Драйвера под Win 9x/NT/2000/XP/Linux. Разъемы: SCSI-II 68-pin. Задание положения и скорости и ускорения в формате 64 bit Floating point. Изменение параметров траектории и ПИД-регуляторов на лету. Примеры программирования на C/C++, Visual Basic, Delphi or LabVIEW. Программное обеспечение: Includes Motion Integrator™ suite of graphical installation, tuning and diagnostic programs |
| ICP DAS, SERVO300 | Линейная, круговая | ISA | ЦАП 12 bit | TTL | 8 / 10 | --- | 2 KByte FIFO | --- | Драйвера под DOS, Win 9x/NT/2000/XP Примеры на BCB, VB, Delphi, LabView driver. | |
| ICP DAS, PCI-8134 | Линейная, круговая, спиральная | PCI | --- | TTL | 24 / 6 | --- | --- | --- | ||
| ICP DAS, PISO-PS400 | Линейная 2/3 осевая, круговая 2 осевая, T/S-curve acceleration and deceleration, point-to-point & coordinated motion, T-curve and S-curve velocity profiles | PCI | ЦАП 16 bit | TTL (1МГц) | 128 / 128 | MCX314As | 32 бит | |||
| PARKER ACR1505 | Линейная, круговая, синусоидальная, кубические сплайны, NURBS, 3D дуги окружности, параболическая, T/S-curve acceleration and deceleration | PCI | ЦАП 16 bit | TTL/SSI | 16 / 16 | 32-bit floating point DSP, Texas TMS320VC33 | 8 МБ 512 KB FLASH пользовательское ПО 512 KB FLASH системная память | --- | Разъемы: 50-pin connectors. Коммуникации: 2 serial ports (RS232 and/or RS422), 1 parallel port (8 bits). Примеры программирования: Visual Basic, Visual C++, C++ Программное обеспечение: Program tools AcroVIEW Motion/PLC Program Development tools ActiveX controls/OCX controls | |
| Nova Electroncs POSYS 1900 | Линейная, круговая, T/S-curve acceleration and deceleration, point-to-point & coordinated motion, T-curve and S-curve velocity profiles | PCI | ЦАП 16 bit / RS232 / 422 / 485 / CAN 2.0B. | TTL (10МГц) /SSI | 8 / 4 | MCX314As | 1МБ | 32 бит | Изменение параметров траектории и ПИД-регуляторов на лету. Режимы управления контуром положения: Close loop / Open loop (motor command is driven from user-programmed register). Разъемы: 100 position AMP connector, 68-position cable | |
| Aerotech SMC – Software Motion Controller | Линейная, круговая, Point-To-Point | До 32 | --- | FireWire (IEEE-1394) / Device Net | TTL | 8 / 8 | ПК | ПК | --- | Организация работы с сервоприводами показан на рис. 9. Формат задания траектории G-code. Примеры на C/C++, Visual Basic. ПО: NCONTROL SDK, NLAB SDK, NLOGIC PLC, NVision VCM |
| ADVANTECH, AMAX 2050KW | --- | 2×RS232, RS485, Ethernet, 2×USB | AMONet™ | --- | 2048 DIO | AMD Geode GX2-400 | 256MБ DDR | --- | Master. Поддержка VGA. Контроль, диагностика, удаленное управление | |
| ADVANTECH, AMAX-22xx | Линейная, круговая, T-curve and S-curve velocity profiles | AMONet RS-485 | ALM x 4, RDY x 4, SVON x 4, INP x 4, ERC x 4 | TTL (6,5МГц) | --- | AMD Geode GX2-400 | --- | 28 бит | Slave для управления приводами Panasonic Minas A, Mitsubishi MR-J2S, Yaskawa Sigma-II. Разъемы: RJ45 x 2, SCSI-20P x 8 (only AMAX-2242/J2S) SCSI-50P x 4 (AMAX-2241/PMA and AMAX-2243/YS2) | |
| Prodigy PCI, Prodigy PC/104 | Линейная, круговая, S-curve, trapezoidal, electronic gearing, and external profile modes | 1,2,3,4 | PC/104 (ISA), PCI-bus, CANbus, serial communications | ЦАП 16 bit, PWM: 10-bit resolution at 20 kHz, 50/50 supports 2 or 3 phase motors; Sign magnitude supports 1 and 2 phase motors only Pulse and Direction Output: 5 MPulses/sec, TTL & Differential | TTL (8МГц) /SSI | 8 / 8 (8 АЦП 10bit) | PMD advanced Magellan™ Motion Processor | 40 KBytes of dual-port RAM | 32 бит | Поддержка: DC brush, brushless DC, step, and microstepping motors. Изменение параметров траектории и контура положения на лету. Период квантования: 50 µsec/axis. Программное обеспечение: PRO-MOTION® GUI. Примеры программирования на Borland C/C++, Visual Basic. Поддержка режима: multiple motion cards. Разъемы: 68-pin connector, RS232. Буфер на 2 точки останова по каждой оси. |
| National Instruments NI735x | Линейная 3D, круговая 3D, T-curve and S-curve velocity profiles | PCI | ЦАП 16 bit | TTL (20МГц) | 8 / 8 (8 АЦП 10bit) | 32-bit DSP | 256 КБ ROM | 32 бит | Драйвера: Windows 2000/NT/XP, Linux and Mac OS X, LabVIEW Real-Time Буфер для точек останова по каждой оси. ПО: LabVIEW, NI Motion Assistant Разъемы: 2×68-pin female high-density VHDCI type | |
| Delta Tau Data Systems Turbo PMAC2 Brick Motion Controller. | Линейная, круговая, T-curve and S-curve velocity profiles | 4, 8 | USB2.0 and Ethernet TCP/IP or RS-232 port. | ЦАП 18 bit | TTL (10МГц) | 16 / 8 Расширяется до 64 | 80 MHz DSP56303 CPU (120 MHz PMAC equivalent) (fast internal memory for 1st 15 axes servo & commutation) | 128k x 24 SRAM (for motion & uncompiled PLC progs, variables, tables, buffers). 1M x 8 flash memory for user backup & firmware | 32 бит | Поддержка работы: 64 asynchronous PLC program capability,256 motion program capacity. Изменение параметров на лету. |
| Delta Tau Data Systems PMAC2-PC/104 | Линейная, круговая, T-curve and S-curve velocity profiles, Rapid point-to-point move mode - Cubic B-spline interpolation mode - Cubic Hermite-spline (PVT) interpolation mode - Automatic move-until-trigger functions with hardware capture - Interactive jog moves | 4, 8 | USB2.0 and Ethernet TCP/IP or RS-232 port. | ЦАП 12 bit | - TTL, - Sinusoidal encoders, interferometers - Resolvers -Potentiometers - LVDTs, RVDTs - Parallel-format encoders, interferometers - MLDTs - Serial absolute encoders (e.g. SSI) | 24 / 12 | Motorola DSP 56k Digital Signal Processor (CPU options from 40 to 160 MHz | 128k x 24 internal zero-wait-state SRAM 512k x 8 flash memory for user backup and firmware | 32 бит | 48-bit floating-point math for user programs. PLC program capability. Разъемы: 50-pin IDC header for amplifier/encoder interface 34-pin IDC header for flag interface Дополнительные функции: --Hardware and software overtravel limits - Amplifier enable/fault handshaking - Following error limits - Integrated current limit - Encoder loss detection (some versions) - Watchdog timer - Program and communications checksums |

Рис. 6. The Brick Motion Controller фирмы Delta Tau Data
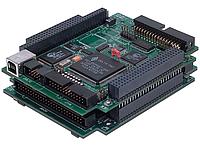
Рис. 7. PMAC2-PC/104 Motion Controller for 4 or 8 Axis фирмы Delta Tau Data


Рис. 8. AMAX 2050KW (Master) и AMAX-2241/PMA (Slave)
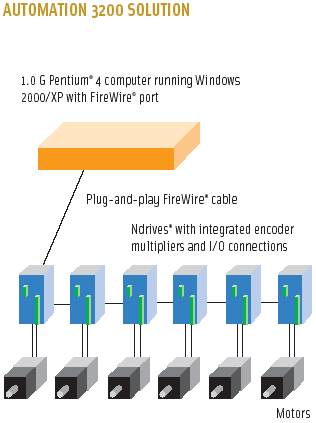
Рис. 9. Архитектура управления сервоприводами фирмы Aerotech
Рис. 10. Сервопривод Ndrive MP Aerotech
Одним из распространенных и недорогих сервоконтроллеров является 3-х осевой сервоконтроллер SERVO-300 фирмы ICP DAS устанавливаемый в ISA-шину компьютера (см. рис. 3). Этот контроллер оснащен двумя видами интерполяции – линейная и круговая, а также 8 дискретными входами и 10 выходами. Единственным недостатком такого сервоконтроллера является использование ISA-шины. Ввиду того, что на современных недорогих персональных компьютерах не установлена такая шина, то при создании системы управления оснащенной данным сервоконтроллером возникает необходимость в покупке специализированного промышленного компьютера с ISA-шиной. Стоимость сервоконтроллера не превышает 500 $, что позволяет строить в целом недорогие системы управления перемещением.
Выводы:
– в целом ситуация на сегодняшнем рынке отражает переход от простых 2-х, 3-х осевых сервоконтроллеров к многоосевым обладающими такими видами интерполяции: линейная, круговая, сплайн-интерполяция, NURBS, синусоидальная, параболическая, спиральная с поддержкой программируемых T/S-законов разгона торможения.
– Алгоритмы функционирования контура положения предполагают возможность изменения параметров контура положения (коэффициенты регуляторов, обратной связи, параметров траектории, T/S-законов разгона торможения).
– преимущественно наибольшее распространение получают сервоконтроллеры оснащенные PCI-интерфейсом (выполненные как устанавливаемая PCI-карта в компьютер) либо как законченный блок устанавливаемый на DIN-рейку.
– Для интеграции в системы сторонних разработчиков достаточно удобен вариант сервоконтроллера Delta Tau Data Systems PMAC2-PC/104. Он обладает практически всеми параметрами присущими современному сервоконтроллеру как с точки зрения алгоритмического обеспечения, так и по наличию периферии и поддерживаемым сигналам обратной связи от датчиков положения.
– Существуют производители (Aerotech, рис. 9) выносящие частично задачи расчета траектории на верхний уровень – программная реализация на ПК.
– в качестве интерфейсов обратной связи наиболее распространены – TTL (не менее 2МГц)/SSI. Однако следует отметить, что в ряде случаев (например Delta Tau) существуют сервоконтроллеры оснащенные такими интерфейсами как – Синусоидальный, резольвер, параллельный код.
– разрядность ЦАП современных сервоконтроллеров составляет в основном – 16 бит.
– увеличение количества дискретных входов/выходов (до 24, 32, 64). Это позволяет отказаться от дополнительной покупки специализированных модулей ввода/вывода, что в свою очередь позволяет реализовывать функции PLC на сервоконтроллере.
– Для вывода большого количества сигналов используются многопиновые разъемы, например 68-pin female high-density VHDCI type.
– Ряд производителей функции PLC выносят в отдельные модули специализирующиеся только на функциях обработки дискретного ввода/вывода.
– Большинство производителей поддерживают параллельную работу нескольких сервоконтроллеров.
– Практически все сервоконтроллеры оснащены алгоритмами позиционирования в программный и аппаратный «ноль».
– Большенство производителей вносят алгоритмы управления типа «Look-Ahead».
– Исторически сложилось, что наиболее распространенным форматом задания траекторий движения является: G-code. Однако ряд производителей, особенно плат с шиной PCI предлагают набор библиотек со своими функциями. Согласование этих функций и G-кодов выполняется с помощью дополнительных библиотек.
– применение 64-битных RISC-процессоров с арифметикой поддерживающей плавающую запятую либо специализированных сигнальных микроконтроллеров предназначенных для использования в системах «Motion Control» (MCX314As, PMD advanced Magellan™ Motion Processor).
– В качестве интерфейсов связи с сервоприводами помимо ЦАП используются Ethernet, CAN, либо специализированные интерфейсы например AMONet™ (Advantech).
– Интерфейсы связи с ПК различны, в основном зависит от производителя – Ethernet, USB, FireWire, PCI, ISA.
– Частота квантования в контуре положения в среднем составляет 500 Гц, в некоторых случаях она выше.
– Разрядности перемещений составляют +32..-32 бит.
Date: 2015-09-24; view: 722; Нарушение авторских прав