Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Синхронные машины. Машины постоянного тока
|
|
const) вектор тока İа2 также поворачивается вокруг точки 0, располагаясь перпендикулярно вектору – jİа2xсн Из диаграммы видно, что в рассматриваемом случае ток двигателя İа2 будет иметь отстающую реактивную составляющую.
Если нагрузка двигателя снизится по сравнению с исходной, то угол θ уменьшится до значения θ3. При этом ток двигателя İа3 будет иметь опережающую реактивную составляющую.
Следовательно, изменение активной мощности синхронного двигателя приводит к изменению его cosφ: при уменьшении нагрузки вектор тока поворачивается в сторону опережения и двигатель может работать с cosφ = 1 или с опережающим током; при увеличении нагрузки вектор тока поворачивается в сторону отставания.
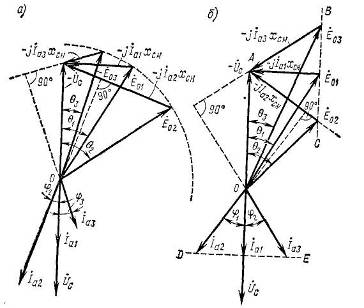
Рис. 1.46 – Упрощенные векторные диаграммы синхронного двигателя:
а – при изменении нагрузочного момента на валу; б – при изменении э. д. с. Е0 путем регулирования тока возбуждения
Если при неизменной активной мощности менять ток возбуждения, то будет меняться только реактивная мощность, т.е. величина cosφ. Векторная диаграмма для этого случая изображена на рис. 1.46, б. Если двигатель работает при cosφ = l, то этому режиму соответствует э.д.с. Ė01 и некоторый угол θ1. При уменьшении тока возбуждения э.д.с. Ė0 снижается до Ė02. Поскольку активная мощность остается неизменной, из условия Р = Рэм = mUc (E0/xсн) sinθ = const получим, что Е01 sin θ1 = Е02 sinθ2 Отсюда следует, что конец вектора Ė0 при изменении тока возбуждения будет перемещаться по прямой ВС, параллельной вектору Щc и проходящей через конец вектора Ė01 Из векторной диаграммы (рис. 1.46, б) видно, что угол θ2 будет больше θ1.
Аналогично строится диаграмма при увеличении тока возбуждения. В этом случае э д с Ė0 возрастает до величины Ė03 и угол θ3 становится меньшим θ1. Вектор – jİа3xсн поворачивается вокруг точки А и соответственно ему изменяет направление вектор тока İa3, перпендикулярный вектору – jİa3xсн
При этом из условия равенства активных мощностей имеем: Ia1 cosφ1 = Iа2 cosφ2 = Ia3 cosφ3, конец вектора тока İа перемещается по прямой DE, перпендикулярной вектору Щc По диаграмме, приведенной на рис 1.46, б, можно построить U-образные характеристики для двигателя Iа = f(Iв), которые будут иметь такую же форму, как и характеристики для генератора (см рис 1.40), с той лишь разницей, что для двигателя угол сдвига фаз φ принято отсчитывать от вектора напряжения сети Щc Поэтому при недовоз-буждении ток İа будет отставать от напряжения сети Щc, т.е. двигатель будет потреблять из сети реактивную мощность Q, а при перевозбуждении ток будет опережать напряжение сети Щc, т.е. двигатель будет отдавать в сеть реактивную мощность
Рабочие характеристики (рис 1.47) Представляют собой зависимости тока Iа, электрической мощности P1 поступающей в обмотку якоря, к п д η и соsφ от отдаваемой механической мощности Р2 при Uc = const, fc = const и Iв = const Поскольку частота вращения двигателя постоянна, зависимость n = f(P2) обычно не приводится; не приводится также и зависимость M = f(P2), так как вращающий момент М пропорционален Р2. Зависимость Р1 = f(Р2) имеет характер, близкий к линейному
Ток двигателя при холостом ходе является практически реактивным По мере роста нагрузки растет активная составляющая тока, в связи с чем зависимость тока Ia от мощности Р2 является нелинейной Кривая η = f(P2) имеет характер, общий для всех электрических машин. Синхронные двигатели могут работать с соsφ = 1, но обычно их рассчитывают на работу при номинальной нагрузке с опережающим током, при этом cosφном = 0,9 ч 0,8 В этом случае улучшается суммарный cosφ сети, от которой питаются синхронные двигатели, так как создаваемая ими опережающая реактивная составляющая тока Iа компенсирует отстающую реактивную составляющую тока асинхронных двигателей. Зависимость cosφ = f(P2) при работе машин с перевозбуждением имеет максимум в области Р2 > Рном. При снижении Р2 величина cosφ уменьшается, а отдаваемая в сеть реактивная мощность возрастает.
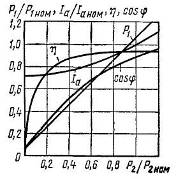
Рис. 1.47 – Рабочие характеристики синхронного двигателя
Достоинства и недостатки синхронного двигателя в сравнении с асинхронным. Синхронные двигатели имеют следующие достоинства:
а) возможность работы при cosφ = l; это приводит к улучшению cosφ сети, а также к сокращению размеров самого двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций;
б) меньшую чувствительность к колебаниям напряжения, так как его максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения);
в) строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатками синхронных двигателей являются:
а) сложность конструкции;
б) сравнительная сложность пуска в ход;
в) трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100 кВт. Однако при более высоких мощностях, когда особенно важно иметь высокий cosφ и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Date: 2015-09-05; view: 334; Нарушение авторских прав