Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Моделирование систем физической защиты
|
|
Лабораторная работа 1.
Цель: Изучить метод разработки модели системы физической защиты, модель нарушителя и алгоритм анализа системы физической защиты согласно предложенной модели.
Рассматриваемые вопросы:
Система физической защиты (СФЗ) может быть определена как совокупность элементов или компонентов, предназначенных для достижения безопасного функционирования объекта в соответствии с планом. Основными функциями СФЗ являются: обнаружение, задержка, реагирование. Функция обнаружения характеризуется вероятностью обнаружения, задержка характеризуется временем преодоления СФЗ, реагирование – временем реакции охраны [1].
В принятой модели СФЗ критерием эффективности СФЗ принимается критерий своевременности обнаружения несанкционированного доступа (НСД). Под своевременным обнаружением понимается принятие решения об обнаружении НСД в такой момент времени, когда остается еще достаточно времени для развёртывания сил охраны и перехвата нарушителя. Время реагирования сил охраны ТР определяет критическую точку обнаружения (КТО). КТО – это точка на маршруте движения нарушителя, после которой обнаружение НСД не позволяет силам охраны своевременно прибыть к месту перехвата и оказать эффективное противодействие нарушителям [2]. В этой точке время реагирования сил охраны еще не превосходит минимальное время совершения НСД: TНСД ≥ TP.
Модель системы физической защиты состоит из нескольких компонентов:
§ модель нарушителя;
§ модель объекта.
Модель нарушителя представляет собой совокупность стратегии действий нарушителя и матриц навыков: матрицу вероятностей P (1) и матрицу времен T (2).
 (1)
(1)
Элементом матрицы вероятностей t i,j является время преодоления элемента СФЗ i -го типа, используя j -й навык из набора навыков нарушителя.
 (2)
(2)
В предлагаемой модели рассматриваются три основных стратегии нарушителя при преодолении барьеров СФЗ:
§ минимизация времени преодоления;
§ минимизация вероятности обнаружения;
§ оптимальная стратегия.
При оптимальной стратегии до КТО нарушитель действует согласно стратегии минимизации вероятности обнаружения (скрытое проникновение), а после КТО – согласно стратегии минимизации времени преодоления (силовой прорыв). Данная комбинированная стратегия показана на рис. 1. Применение данной стратегии в модели нарушителя соответствует принципу гарантированного результата и снимает неопределенность в стратегии поведения нарушителя.
| Критическая точка обнаружения |
| Точка начала движения |
| Точка цели |
| Нарушители сводят к минимуму вероятность обнаружения |
| Нарушители сводят к минимуму время задержки |
| Участок скрытого движения |
| Участок быстрого движения |
Рис. 1. Модель комбинированной стратегии действий нарушителя
Модель объекта представляет собой граф, представленный в виде матрицы смежности M [ a, b ]. Вершинами данного графа являются области однородности (ОО) – области на объекте, где совпадают три основные характеристики системы физической защиты: время реакции охраны, время преодоления данной области нарушителем и вероятность обнаружения нарушителя устройствами обнаружения, действующими в данной области. Характеристиками ОО служат: набор устройств и инженерных средств охраны, установленных или действующих в данной зоне, а также время реакции сил охраны.
ОО служат для построения пространственной модели объекта. Пример областей однородностей и графа однородности показан на рис. 2.
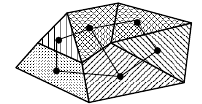
Рис. 2. Области однородности с графом (пространственной моделью) объекта
Задача анализа СФЗ состоит в том, чтобы определить наличие критических путей (таких путей, где вероятность своевременного обнаружения P ОБ будет больше минимально заданной вероятности обнаружения P min). Поиск критических путей производится по следующему алгоритму:
ЭТАП 1: По модифицированному алгоритму Дейкстры находятся все пути из множества точек начала движения N = (n 1, n 2,..., n i,..., n k) (областей однородности, расположенных на периметре объекта) к множеству целевых точек С = (с 1, с 2,..., сj,..., сm) (областей однородности, в которых находятся критические элементы объекта). Получаем набор векторов вида (3):
v = (ni...ma...сj). (3)
ЭТАП 2: Расчет производим согласно оптимальной стратегии действий нарушителя. На каждом векторе v (3) находим КТО – точку, в которой  , где Тохр.КТО – время реакции охраны в критической точке обнаружения; Tj – время преодоления j -й зоны однородности СФЗ, расположенной между КТО и целевой зоной. Время преодоления берется из матрицы навыков нарушителя T (2), оно должно быть минимально из всего набора времен при преодолении элементов системы физической защиты в j -й зоне однородности. Итоговая оценка найденного пути v (3) (вероятность своевременного обнаружения) P ОБ будет являться вероятностью обнаружения нарушителя до КТО и находится по формуле (4):
, где Тохр.КТО – время реакции охраны в критической точке обнаружения; Tj – время преодоления j -й зоны однородности СФЗ, расположенной между КТО и целевой зоной. Время преодоления берется из матрицы навыков нарушителя T (2), оно должно быть минимально из всего набора времен при преодолении элементов системы физической защиты в j -й зоне однородности. Итоговая оценка найденного пути v (3) (вероятность своевременного обнаружения) P ОБ будет являться вероятностью обнаружения нарушителя до КТО и находится по формуле (4):
 . (4)
. (4)
Вероятность обнаружения Pj берется из матрицы вероятностей навыков нарушителя P (1). Выбранная вероятность должна быть минимальна из всего набора вероятностей обнаружения НСД при преодолении элементов СФЗ в j -й зоне однородности.
При P ОБ ≤ Pmin найденный путь v будет являться критическим. По наличию или отсутствию критических путей делается вывод о достаточности или недостаточности мероприятий по физической защите объекта.
Литература
1. Оленин Ю.А. Основы систем безопасности объектов: Учеб. пособие. – Пенза: Информ.-издат. центр ПГУ, 2002. – 122 с.
2. Гарсиа М. Проектирование и оценка систем физической защиты. – М.: Мир, 2003. – 386 с.
Приложение 1
| Начало |
| Инициализировать сеть мод |
| Выбрать не посещённую моду с минимальным расстоянием от начальной. Назначить её как моду С |
| С-- конечная |
| Для каждой соседней моды N с длиной связи D |
| N < C+D |
| N = C+D |
| N = P+D |
| Обратить порядок |
| Список мод в пути |
| Конец |
| Да |
| Нет |
| Нет |
| Да |
Алгоритм Дейкстры
Date: 2015-09-05; view: 887; Нарушение авторских прав