Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Оценивание вектора состояний с помощью наблюдателя Люенбергера
|
|
Зададим полученные коэффициенты в MatLab.
a1= -10;
a2=1;
b1=-0.0730;
 ;
;

В среде Simulink системы Matlab построим структурную схему объекта и наблюдателя.
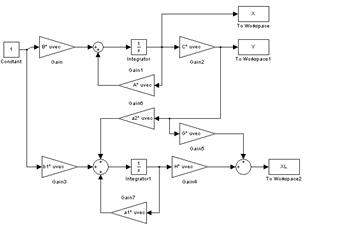
Рис 1 – Simulink-модель объекта и наблюдателя.
На данной модели приняты обозначения:
X,Y – вектор состояния и вектор изменения объекта;
XL – вектор состояния наблюдателя (т.е. оценка вектора состояния объекта).
Запись A*uvec, B*uvec, C*uvec, G*uvec, H*uvec, a1*uvec, a2*uvec и b1*uvec обозначает векторное умножение A, B, C, G или H и скалярных величин a1, a2, b1 на соответствующий входной сигнал.
Построим графики вектора состояния
t=0:0.1:10;
figure(1);
plot(t, X(:,1),'b',t,XL(:,1),'or');
grid;
figure(2);
plot(t, X(:,2),'b',t,XL(:,2),'or');
grid;
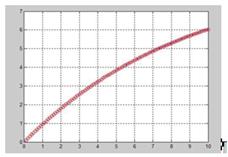
Рис. 2 – истинные и восстановленные значения координат первой компоненты вектора состояния системы
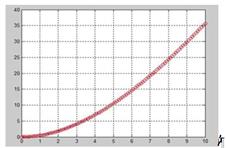
Рис. 3 – истинные и восстановленные значения координат второй компоненты вектора состояния системы
На рисунках 2 и 3 линией показаны истинные кривые значения вектора координат объекта, а символами ‘o’ – восстановленные. Из графиков можно сделать вывод, что при отсутствии помех, в «идеальных условиях», с помощью наблюдателя пониженного порядка можно очень точно оценить координаты вектора состояния. Но в зашумленных условиях, наблюдатель Люинбергера ведет себя неадекватно, т.к., в отличие от наблюдателя полного порядка (фильтр Калмана), оцениваются и учитываются лишь неизвестные компоненты вектора состояния. Если же на выход системы подать помеху, то в системе при измерении, наблюдатель неверно оценивает координаты вектора состояния.
Заключение
Наблюдатель пониженного порядка проще реализуем и достаточно точен при использовании его в системах, где помехи незначительны или отсутствуют. К сожалению, на практике зачастую приходится иметь дело с сильно зашумленными сигналами и соответственно пользоваться наблюдателями пониженного порядка нежелательно. В данной ситуации целесообразно использовать наблюдатель полного порядка, например фильтр Калмана.
Список используемой литературы и программного обеспечения
1. Дилигенская А. Н. Идентификация объектов управления. – Самара.: Самарский государственный технический университет 2009.
2. Андреев Ю.Н. Управление конечномерными линейными объектами. - М.: Наука, 1976.
Программное обеспечение:
1. Microsoft Office 2007
2. MATLAB 2010
Date: 2015-08-24; view: 1052; Нарушение авторских прав