Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Основная часть – до 80 мин. 1-й учебный вопрос:Протоколы, используемые для подсоединения драйверов ввода/вывода к SCADA системе
|
|
1-й учебный вопрос: Протоколы, используемые для подсоединения драйверов ввода/вывода к SCADA системе
Современные SCADA-системы не ограничивают выбора аппаратуры нижнего уровня (контроллеров), так как предоставляют большой набор драйверов или серверов ввода/вывода и имеют хорошо развитые средства создания собственных программных модулей или драйверов новых устройств нижнего уровня. Для подсоединения драйверов ввода/вывода к SCADA-системе в настоящее время используются следующие механизмы:
• ставший стандартом де-факто динамический обмен данными (DDE);
• собственные протоколы фирм производителей SCADA-систем, реально обеспечивающие самый скоростной обмен данными;
• новый ОРС-протокол, который, с одной стороны, является стандартным и поддерживается большинством SCADA-систем, а с другой стороны, лишен недостатков протоколов DDE.
Изначально протокол DDE применялся в первых человеко-машинных интерфейсах в качестве механизма разделения данных между прикладными системами и устройствами типа ПЛК (программируемые логические контроллеры). Для преодоления недостатков DDE, прежде всего для повышения надежности и скорости обмена, разработчики предложили свои собственные решения (протоколы), такие, как AdvancedDDE-или FastDDE-протоколы, связанные с пакетированием информации при обмене с ПЛК и сетевыми контроллерами. Но такие частные решения приводят к ряду проблем:
• для каждой SCADA-системы пишется свой драйвер для поставляемого на рынок оборудования;
• в общем случае два пакета не могут иметь доступ к одному драйверу в одно и то же время, поскольку каждый из них поддерживает обмен именно со своим драйвером.
Основная цель ОРС-стандарта (OLE for Process Control) заключается в определении механизма доступа к данным с любого устройства системы управления. ОРС позволяет производителям оборудования поставлять программные компоненты, которые стандартным способом обеспечат клиентов данными с ПЛК. При широком распространении ОРС-стандарта появятся следующие преимущества:
• ОРС позволят определять на уровне объектов различные системы контроля и управления, работающие в распределенной гетерогенной (неоднородной) среде;
• ОРС устранят необходимость использования различного нестандартного оборудования и соответствующих коммуникационных программных драйверов;
• у потребителя появится больший выбор при разработке приложений.
С ОРС-решениями интеграция в гетерогенные системы становится достаточно простой. Применительно к SCADA-системам ОРС-серверы, расположенные на всех компьютерах системы управления производственного предприятия, стандартным способом могут поставлять данные в программу визуализации, базы данных и т. п., уничтожая, в некотором смысле, само понятие неоднородной системы.
2-й учебный вопрос: Аппаратная реализация связи с устройствами ввода/вывода
Для организации взаимодействия с контроллерами могут быть использованы:
• СОМ-порты. В этом случае контроллер или объединенные сетью контроллеры подключаются по протоколам RS-232, RS-422, RS-485;
• сетевые платы. Использование такой аппаратной поддержки возможно, если соответствующие контроллеры снабжены интерфейсным выходом на Ethernet;
• вставные платы. В этом случае протокол взаимодействия определяется платой и может быть уникальным. В настоящее время предлагаются реализации в стандартах ISA, PCI, CompactPCI.
3-й учебный вопрос: Особенности построения коммуникационного программного обеспечения
Перед рассмотрением реализации связи с устройствами ввода/вывода в SCADA-системах InTouch и Citect остановимся на общем понимании организации коммуникационного ПО в системах управления (рис. 4.1).
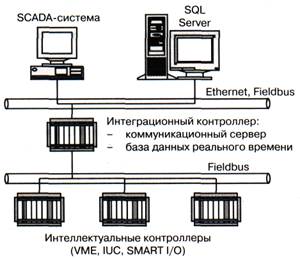
Рис. 4.1. Типовая архитектура системы управления
Коммуникационное ПО является многоуровневым. Количество уровней зависит от используемой операционной системы. Так, Applicom предлагает поддержку для следующих ОС: MS-DOS, UNIX SCO, HP-UX V10, OS/2, MS Windows 3.x, Windows 95/98, Windows NT4 на Intel и Alpha-платформах. Для Windows-платформ ПО включает следующие компоненты:
• статическую библиотеку, используемую с традиционными языками программирования, такими, как С, C++, Pascal;
• динамическую библиотеку (DLL), применяемую со всеми Windows языками программирования (Visual Basic, Visual C/C++, Borland C/C++, Delphi, LabWindows CVI, LabView);
• DDE-сервер, имеющий 16- и 32-битные реализации;
• пакетные реализации DDE-протокола: FastDDE для продуктов линии Wonderware и AdvancedDDE для Rockwell-линии;
• SuiteLink-сервер, реализующий механизм обмена по SuiteLink-протоколу, используемому компонентами пакета FactorySuite (Wonderware);
• ОРС-сервер, поддерживающий интерфейс, определенный ОРС-спецификацией.
На рис. 4.2 показаны программные интерфейсы для Windows-приложений (в том числе и SCADA-систем) и спектр широко распространенных промышленных протоколов.
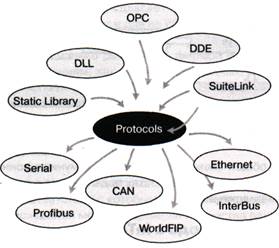
Рис. 4.2. Набор интерфейсов для SCADA-систем и спектр поддерживаемых протоколов
Использование этих протоколов позволяет организовать взаимодействие с контроллерами, устройствами, объединенными промышленными (fieldbuses) и обычными сетями. Предлагаемая схема решения позволяет конечному пользователю, системному интегратору единообразным способом организовать взаимодействие между ПО верхнего уровня и платами, специфичными для каждого типа промышленных сетей.
DDE-, ОРС-компоненты являются серверами по отношению к SCADA-системам. По отношению к ПО нижнего уровня (fieldbus) возможна организация Master/Slave и Client/Server. Внешние устройства способны посылать и принимать данные через плату. Когда вставляемая в персональный компьютер плата является Master/Client, то именно плата с поддерживаемым ПО является инициатором опроса промышленных устройств. В случае применения плат типа Slave/Server они реагируют на запросы внешних устройств.
На некоторых вставных платах имеется разделяемая область памяти. Эта память доступна как приложению в ПК, так и встраиваемому ПО.
На рис. 4.3 представлена обобщенная схема организации коммуникационного ПО для Windows NT.
На предлагаемой схеме отражены как традиционные решения на базе стандартных Windows NT-драйверов, так и с использованием библиотек, реализованных в расширении реального времени RTX oт VenturCom.
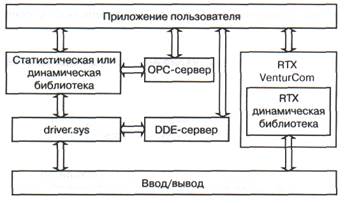
Рис. 4.3. Схема организации коммуникационного ПО для Windows NT
После рассмотрения общей схемы организации коммуникационного ПО представляется логичным остановиться на особенностях подключения к нему SCADA-приложений.
Лекция разработана «___»________20__г.
_______________________(Курнасов Е.В.)
(подпись, фамилия и инициалы автора)
Date: 2015-07-24; view: 397; Нарушение авторских прав