Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
д) Исполнительные двигатели постоянного тока. Довольно часто для автоматических устройств в качестве исполнительных двигателей применяются двигатели постоянного тока
|
|
Довольно часто для автоматических устройств в качестве исполнительных двигателей применяются двигатели постоянного тока. Их назначение, так же как асинхронных исполнительных двигателей, состоит в преобразовании электрического сигнала (напряжения) в механическое движение. Как правило, они работают при независимом питании обмоток якоря и возбуждения. Обычно к обмотке возбуждения подводится постоянное напряжение, U в=const, а к обмотке якоря — напряжение управления, U y. В этом случае получается исполнительный двигатель с якорным управлением. Такие двигатели получили на практике преимущественное применение. Они выполняются на мощности от нескольких ватт до сотен ватт и по устройству в основном не отличаются от обычных машин постоянного тока. При меньших мощностях (1—5 Вт) они делаются также с постоянными магнитами.
Для получения механической и регулировочной характеристик — n = f (M) при U y=const и n = f (U у) при М =const, — возможно более близких к линейным зависимостям, исполнительные двигатели выполняются с малым насыщением стальных участков магнитной цепи. В отношении линейности регулировочных характеристик, пускового вращающего момента и других свойств исполнительные двигатели постоянного тока превосходят асинхронные исполнительные двигатели.
Если напряжение управления подводится к обмотке возбуждения при постоянном напряжении на зажимах якоря, то получается исполнительный двигатель с полюсным управлением. Такие двигатели находят себе ограниченное применение и строятся обычно на малые мощности. Они уступают двигателям с якорным управлением в отношении быстродействия, так как обмотка возбуждения имеет значительно большую постоянную времени, чем цепь якоря. Однако для них требуется меньшая мощность управления.
5-13. Потери и коэффициент полезного действия
Потери в машине постоянного тока разделяются на:
1) магнитные потери в стали якоря Pc и в поверхностном слое полюсных наконечников Р п;
2) механические потери от трения: в подшипниках, вращающихся частей о воздух (сюда же надо отнести вентиляционные потери — на вращение вентилятора, если он имеется), щеток о коллектор, Рмех;
3) электрические потери в обмотках цепи якоря и в переходных контактах щеток, Рэ;
4) потери на возбуждение, Рв;
5) потери добавочные, Р доб.
Первые две группы потерь в сумме дают потери холостого хода (Р с+ Р п+ Р мех= Р 0). так как соответствующую мощность машина потребляет при холостом ходе.
Электрические потери
 ,
,
где S rх — сумма сопротивлений обмоток якорной цепи, приведенных к температуре 75° С (см. § 2-7); 2D U щ — падение напряжения в переходных контактах щеток, которое принимается равным 2 В для угольных, графитных и электрографитированных щеток и равным 0,6 Вв для металлоугольных щеток.
Потери на возбуждение Р в = UI в при параллельном возбуждении; потери в последовательной обмотке возбуждения определяются вместе с электрическими потерями Р э в цепи якоря. Добавочные потери в обмотке и стали якоря при нагрузке Р доб вызываются полями коммутируемых секций и искажением поля из-за реакции якоря. Их принимают равными при номинальной нагрузке для машин без компенсационной обмотки Р доб = 0,01 U н I н, для машин с компенсационной обмоткой Р доб = 0,005 U н I н и считают пропорциональными квадрату тока Iа.
Коэффициент полезного действия генератора
 .
.
Коэффициент полезного действия двигателя
 ,
,
где S P — сумма перечисленных выше потерь.
Значения к.п.д. современных машин постоянного тока при номинальной нагрузке приведены в виде кривой на рис. 5-77.
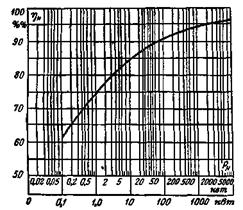
Рис. 5-77. Коэффициент полезного действия машин постоянного тока.
5-14. Машины постоянного тока заводов Советского Союза
Наиболее распространенными машинами в Советском Союзе являются машины серии ПН. Они строились на мощности от 0,15 до 200 кВт и скорости вращения 2870—550 об/мин. В последние годы заводы начали выпускать на те же мощности и скорости вращения машины общего применения новой серии П. Они по сравнению с машинами серии ПН имеют при тех же мощности и скорости вращения меньший вес, лучшие технико-экономические показатели и более надежны в работе. Машины предназначаются для работы в качестве генераторов и двигателей. Номинальные напряжения для генераторов U н=115, 230, 460 В, для двигателей U н=110, 220, 440 В.
Внешний вид одной из машин серии ПН показан на рис 5-78. Для них применяется аксиальная вентиляция. Воздух забирается со стороны коллектора, продувается через каналы в якоре, междуполюсные пространства и выбрасывается в отверстия подшипникового щита со стороны привода. Станины машин выполняются сварными или из цельнотянутой трубы с приваренными к ним лапами.

Рис. 5-78. Внешний вид машины постоянного тока серии ПН.
На рис. 5-79 представлен общий вид одной из современных машин постоянного тока небольшой мощности.
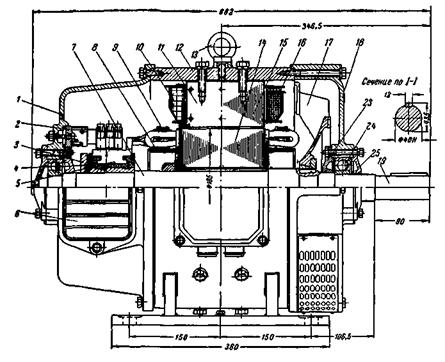
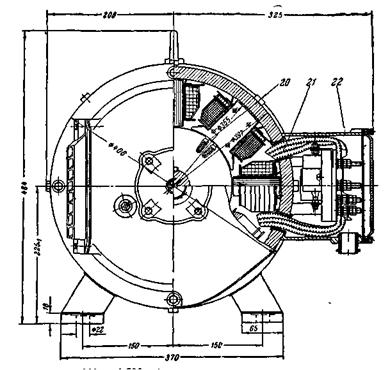
Рис. 5-79. Общий вид двигателя постоянного тока 14 кВт, 220 В, 1500 об/мин.
1 — передний подшипниковый щит; 2 — траверса; 3 — кольцо для размещения балансировочных грузов; 4 — коллектор на пластмассе; 5 — коллекторная пластина; 6 — люковая крышка; 7 — вал; 8 — обмоткодержатель; 9 — бандаж лобовых частей обмотки якоря; 10 — катушка дополнительного полюса; 11 — дополнительный полюс; 12 — станина; 13 — подъемное кольцо (рым-болт); 14 — сердечник якоря; 15 — главный полюс; 16 — катушка главного полюса; 17 — вентилятор; 18 — задний подшипниковый щит; 19 — рабочий конец вала; 20 — паз якоря; 21 — отверстие для ввода кабеля; 22 — коробка вводного устройства; 23 — задняя крышка подшипника; 24 — шариковый подшипник; 25 — передняя крышка подшипника.
Наряду с указанными разработаны и выпускаются новые серии машин общего применения на малые мощности (30 — 270 Вт) и на большие мощности (до нескольких тысяч киловатт).
В последние годы было изготовлено большое количество крупных машин для металлургической промышленности — для систем "генератор — двигатель", обслуживающих прокатные станы (блюминги, слябинги, листопрокатные и др.) мощностью 5000 — 10000 кВт при максимальной ("отключающей" мощности), в 2,5—3 раза большей.
Много машин было изготовлено для гребных установок, мощности которых достигают 8000 — 10000 кВт (атомный ледокол "Ленин").
Среди крупных машин постоянного тока особое место занимают генераторы для электролиза (например, для алюминиевых заводов), выполняемые на большие токи и относительно низкие напряжения (120 — 200 В, 10000 — 20000 А).
Большое количество машин выпускается для электрифицированного транспорта (электропоезда, троллейбусы, трамваи, метро), автотранспорта, кранов, подъемников.
Следует также упомянуть сварочные машины различных типов, предназначенные для электросварки.
Отметим, кроме того, разнообразные машины специального назначения, применяемые в автоматике, — электромашинные усилители, исполнительные двигатели и др.
Date: 2015-07-22; view: 436; Нарушение авторских прав