Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Решение Заказать у нас работу!
|
|
- Определим номинальный ток двигателя:

По найденному значению тока из табл. Приложения 2 выбираем сечение питающего провода для двигателя. При номинальном токе 3,35 А подойдут провода сечением 2,5 кв. мм трехжильные медные с резиновой или полихлорвиниловой изоляцией или трехжильные алюминиевые провода с резиновой или полихлорвиниловой изоляцией.
- Определим величину пускового тока из известного по условию задачи соотношения Iпуск/Iном = 6,5:

- Определим номинальный ток плавкой вставки:
Если принять, что двигатель работает с тяжелыми условиями пуска (большая длительность разгона, частые пуски):
Из ряда стандартных плавких вставок на номинальные токи 6, 10, 15, 20, 25, 30, 50, 60, 80, 100, 120, 150 А выбираем вставку на номинальный ток 15 А.
- Определим частоту вращения магнитного поля двигателя:
В обозначении двигателя (4А80А2У3) после буквы "А" указано количество полюсов, количество пар полюсов вдвое меньше, т.е. в данном случае Р = 1.

- Определим частоту вращения ротора двигателя:

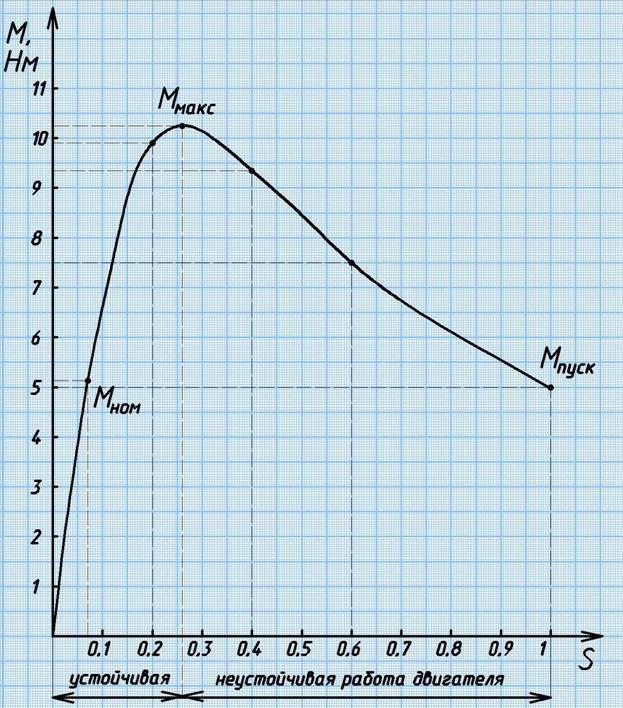
- Определим вращающий момент при номинальном режиме работы:

- Из заданной по условию задачи перегрузочной способности двигателя (Ммакс/Мно = 2,0) определим максимальный вращающий момент:

- Определим величину скольжения, при которой момент наибольший:


Из двух полученных значений по условию устойчивой работы двигателя  выбираем
выбираем  .
.
- Определим пусковой момент двигателя (при S = 1):

- Определим момент при S = 0,2:

- Момент при S = 0,4:

- Момент при S = 0,6:

- Построим график зависимости вращающего момента от скольжения:
Исходные данные. Задача
В таблице 1 приведены данные двигателя постоянного тока
Таблица 1.
| Тип |  , кВт , кВт
|  , В , В
|  , A , A
|  , об/мин , об/мин
|  , Ом , Ом
|  , Ом , Ом
|  , Ом , Ом
|  , Ом , Ом
| КПД,% | GD, кгм2 |
| П21 | 1,5 | 1,25 | 0,326 | 0,0546 | 0,045 |
Для двигателя постоянного тока с параллельным возбуждением требуется:
Рассчитать пусковой реостат и построить пусковые характеристики, если на валу
 ;
;
Определить сопротивление, которое необходимо включать в цепь якоря, чтобы частота вращения двигателя при номинальном моменте составляла  ;
;
Рассчитать сопротивление, которое следует включить в якорную цепь, чтобы при изменении полярности питающего напряжения якоря ток его был равен  при номинальной скорости. Построить эту механическую характеристику;
при номинальной скорости. Построить эту механическую характеристику;
Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до  при номинальной скорости. Построить соответствующую характеристику;
при номинальной скорости. Построить соответствующую характеристику;
Указать в чем недостатки реостатного регулирования, оценить его КПД.
2. Решение задачи
По номинальным данным строим механическую характеристику:




Определяем моменты:
а) пусковой ( ) – из условия допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
) – из условия допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:

б) Переключения пусковых ступеней ( ) – из условия сохранения динамики при переключении пусковых ступеней реостата
) – из условия сохранения динамики при переключении пусковых ступеней реостата

Полученные характеристики представлены на рисунке 2.

Рис.2. Технические характеристики двигателя
Определяем пусковой резистор  :
:
 ,
,
 ,
,

 ,
,
Определяем пусковой резистор  :
:



Определяем пусковой резистор  :
:



Запишем уравнение механической характеристики с учетом требуемых значений параметров:


т.к.  , следовательно
, следовательно 

Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:



Рис. 3. Характеристика при смене питающего напряжения якоря, при токе 
Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до  при номинальной скорости. Построить соответствующую характеристику:
при номинальной скорости. Построить соответствующую характеристику:

Рис. 4. Характеристика двигателя в режиме динамического торможения
При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:

По номинальным данным строим механическую характеристику:
Определяем моменты:
а) пусковой () – из условия допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
б) Переключения пусковых ступеней () – из условия сохранения динамики при переключении пусковых ступеней реостата
Полученные характеристики представлены на рисунке 2.1
Рис.2.1 Технические характеристики двигателя
Определяем пусковой резистор :
,
,
,
Определяем пусковой резистор :
Определяем пусковой резистор :
Запишем уравнение механической характеристики с учетом требуемых значений параметров:


т.к.  , следовательно
, следовательно

Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:



Рис. 2.2. Характеристика при смене питающего напряжения якоря, при токе
Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до при номинальной скорости. Построить соответствующую характеристику:

Рис. 2.3. Характеристика двигателя в режиме динамического торможения
При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:

3. Исходные данные. Задача
Таблица 1. Тип двигателя – МТН 211-6
| Рн, кВт | nн, об/мин | 
| cosφ | Статор | Ротор | Кс | J, кгм2 | |||||||
| ном | х.х | IСН | IСХ | RC | ХС | ЕРН | IРН | rр | хр | |||||
| А | А | Ом | Ом | В | А | Ом | Ом | |||||||
| 8,2 | 0,7 | 0,112 | 24,6 | 0,835 | 0,88 | 0,466 | 0,666 | 2,18 | 0,46 |
Для асинхронного двигателя с фазным ротором требуется:
1. Построить естественную механическую характеристику.
2. Рассчитать сопротивление пускового реостата и построить соответствующие характеристики, если на валу ;
3. Построить механическую характеристику в режиме динамического торможения при  ,
,  . Насыщение магнитной системы не учитывать.
. Насыщение магнитной системы не учитывать.
4. Изложить перспективные методы регулирования скорости двигателей переменного тока.
4. Решение задачи
Построить естественную механическую характеристику:



МКР = λ * МН=2*87,04=174,08 Нм


М1 = 0,885 * МКР,
М1 = 0,885 * 174,009 = 154.
М2 = 1,1 * МН,
М2 = 1,1 * 87,005 = 95,7.
Рис. 4.1. Естественная и пусковые характеристики
Рассчитать сопротивление пускового реостата и построить соответствующие характеристики, если на валу МС = МН.
Определяем пусковой резистор RД1:
RР = 0,466 Ом,
аb = 24,67 мм,
ас = 40,17 мм,
R = RР * (ас/ab),
R = 0,466 * (40,17/24,67) = 0,759 Ом,
RД1 = R – RР,
RД1 = 0,759 – 0,466 = 0,293 Ом.
Определяем пусковой резистор RД2:
аb = 24,67 мм,
аd = 64,67 мм,
R = RР * (аd/ab),
R = 0,466 * (64,67 /24,67) = 1,22 Ом,
RД2 = R – (RР + RД1),
RД2 = 1,22 – (0,466 + 0,293) = 0,461 Ом.
Определяем пусковой резистор RД3:
аb = 24,67 мм,
ае = 104,67 мм,
R = RР * (аe/ab),
R = 0,466 * (104,67 /24,67) = 1,97 Ом,
RД3 = R – (RР + RД1 + RД2),
RД3 = 1,97 – (0,466 + 0,293 + 0,461) = 0,289 Ом.
Пусковые характеристики представлены на рис.4.1.
Построить механическую характеристику в режиме динамического торможения при IВ = 2IОН, RДОБ = 0,3RНОМ. Насыщение магнитной системы не учитывать.
Определяем значение эквивалентного переменного тока:
IЭКВ =  *IП*2,
*IП*2,
IЭКВ = *24,6*2 = 39,85 А
Определяем максимальный момент:
МКР =  ,
,
МКР =  = 11,44 Нм
= 11,44 Нм
Определяем критическое скольжение:
SКР =  ,
,
SКР =  = 0,301.
= 0,301.
М =  ,
,
Результаты расчетов сводим в таблицу 4.1
Таблица. 4.1
| М | S | ω |
| -13,4831 | 0,05 | 5,2335 |
| -21,2198 | 0,1 | 10,467 |
| -23,4877 | 0,15 | 15,7005 |
| -22,9107 | 0,2 | 20,934 |
| -21,2906 | 0,25 | 26,1675 |
| -19,4496 | 0,3 | 31,401 |
| -17,6981 | 0,35 | 36,6345 |
| -16,1308 | 0,4 | 41,868 |
| -14,7599 | 0,45 | 47,1015 |
| -13,5692 | 0,5 | 52,335 |
| -12,5348 | 0,55 | 57,5685 |
| -11,6331 | 0,6 | 62,802 |
| -10,8432 | 0,65 | 68,0355 |
| -10,1473 | 0,7 | 73,269 |
| -9,5309 | 0,75 | 78,5025 |
| -8,98184 | 0,8 | 83,736 |
| -8,49022 | 0,85 | 88,9695 |
| -8,04784 | 0,9 | 94,203 |
| -7,64791 | 0,95 | 99,4365 |
| -7,28481 | 104,67 |
Рис.4.2 Механическая характеристика в режиме динамического торможения.
| <== предыдущая | | | следующая ==> |
| на 2014/15 учебный год | | | Выбор аксессуаров к велосипеду |
Date: 2015-07-23; view: 403; Нарушение авторских прав