Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Лабораторная работа
|
|
«Исследование трехфазного асинхронного двигателя»
Цель работы: изучить конструкцию трехфазного асинхронного двигателя с короткозамкнутым ротором; освоить приемы опытной проверки обозначений выводов обмотки статора и исследовать экспериментально рабочие характеристики двигателя.
Устройство асинхронной машины
Асинхронной машиной называется двухобмоточная электрическая машина переменного тока, у которой только одна обмотка (первичная) получает питание от электрической сети переменного тока с частотой  , а вторая обмотка (вторичная) замыкается накоротко, или на электрическое сопротивление. В первом случае машина называется асинхронной машиной с короткозамкнутым ротором (с фазным ротором).
, а вторая обмотка (вторичная) замыкается накоротко, или на электрическое сопротивление. В первом случае машина называется асинхронной машиной с короткозамкнутым ротором (с фазным ротором).
Асинхронная машина может работать в 3-х режимах – генераторном, двигательном и в режиме трансформатора. Практика показала, что наиболее целесообразно использовать асинхронные машины в качестве двигателей, поэтому данная лабораторная работа рассматривает только двигательный режим работы асинхронной машины.
Конструктивно трехфазный асинхронный двигатель состоит из двух главных частей: неподвижного статора и вращающегося ротора.
Устройство асинхронной машины показано на рис.1. Статор из магнитопровода 1, который представляет собой полный цилиндр, собранный из пластин электротехнической стали. Пластины штампуются из листовой или рулонной электротехнической стали, и затем изолируются друг от друга слоем лака. В пазах магнитопровода расположена трехфазная обмотка 2, она состоит из трех отдельных фазных обмоток, которые для лучшего использования окружности статора располагаются по нескольким пазам (распределенная обмотка). Магнитопровода и обмотка являются активными частями статора, специально назначенными для образования вращающегося магнитного поля. Активные части статора фиксируются в определенном положении станиной 3.
С целью уменьшения пульсаций магнитного поля и добавочных потерь, связанных с зубчатостью магнитопровода, обмотка статора в асинхронных двигателях, как правило укладывается в полузакрытые (рис.2а,б,в) пазы. Для таких пазов пригодны как однослойные, так и двухслойные всыпные обмотки. Катушки этих обмоток выполняются из изолированного обмоточного провода, каждый проводник катушки «всыпают» в паз по отдельности.
Для изоляции витков катушки друг от друга достаточно собственной изоляции обмоточных проводников. Для изоляции между слоями обмотки служат прокладки из изолирующего материала. Лобовые части обмоток, это часть обмотки выступающая из пазов на перегибе, изолируются с помощью специальной изоляционной ленты.
Роторы асинхронной машины могут изготовлятся или короткозамкнутыми (типа беличьей клетки, рис.3), или с фазной обмоткой (фазный ротор, рис.4) выводные концы которой присоединяются к контактным кольцам.
Круговое вращающееся магнитное поле
Оно представляет собой поле, у которого результирующий вектор магнитной индукции неизменен по величине и вращается с постоянной угловой скоростью ω. Характеристики вращающегося магнитного поля зависят от способа геометрического расположения фазных обмоток статора.
Расположим три фазные обмотки статора так, чтобы их оси были смещены на 120˙ по отношению друг к другу (рис.5) и будем питать их симметричным трехфазным током, в катушках появятся токи

Каждый из токов создает пульсирующее магнитное поле, направленное вдоль оси своих катушек. Вектор магнитной индукции катушек пропорциональны токам катушек


Результирующие действия всех трех обмоток приводят к появлению результирующего вектора  .
.
 (1)
(1)
Из выражения (1) видно, что результирующая магнитная индукция неизменна по модулю  Вт, т.е. длина результирующего вектора, или его амплитудное значение не меняется во времени, но изменяется положение этого вектора в пространстве, он вращается со скоростью ω.
Вт, т.е. длина результирующего вектора, или его амплитудное значение не меняется во времени, но изменяется положение этого вектора в пространстве, он вращается со скоростью ω.
Принцип действия асинхронного двигателя.
В момент пуска ротор асинхронного двигателя неподвижен. При подаче напряжения на обмотки статора в статоре возникает круговое вращающееся магнитное поле. Магнитный поток статора пересикает обмотки ротора, наводя на них ЭДС с частотой, равной частоте этих перемещений. ЭДС в обмотках ротора вызывает появление токов в них. По закону Ленца эти токи стремятся своим магнитным полем компенсировать изменение вызвавшего их магнитного поля. Механическое воздействие вращающегося магнитного поля и полей токов ротора приводит к тому, что ротор начинает вращаться в ту же сторону, в какую вращается поле.
При неподвижном роторе двигатель работает как трансформатор, в каждый из фаз вторичной обмотки которого наводится ЭДС
 , (2)
, (2)
здесь - частота тока в сети
 - число витков в обмотке ротора, для короткозамкнутого ротора
- число витков в обмотке ротора, для короткозамкнутого ротора 
 - обмоточный коэффициент
- обмоточный коэффициент
 - магнитный поток машины
- магнитный поток машины
Во время работы двигателя ротор вращается вслед за полем, скорость вращения которого  ,
,
где р – число пар полюсов двигателя. При этом скорость ротора будет отличаться от скорости  которую еще называют синхронной скоростью вращения, на величину
которую еще называют синхронной скоростью вращения, на величину  . Эту разность характеризуют таким показателем, как скольжение S
. Эту разность характеризуют таким показателем, как скольжение S
 или
или  (3)
(3)
При этом частоте тока в обмотке ротора
 или
или  (4)
(4)
Из формул (2) и (4) следует, что ЭДС при вращающемся роторе 
 (5)
(5)
Асинхронным двигатель называется потому, что как следует из (5) его скорость не может быть равна синхронной скорости .
Величина скольжения обычно достигает величин 2-6%.
Момент на валу асинхронного двигателя определяется выражением
 ,
,
где с – коэффициент зависящий от конструктивных данных двигателя.
Ф – магнитный поток машины
I2 – ток ротора
 - угол сдвига фаз между током и ЭДС ротора.
- угол сдвига фаз между током и ЭДС ротора.
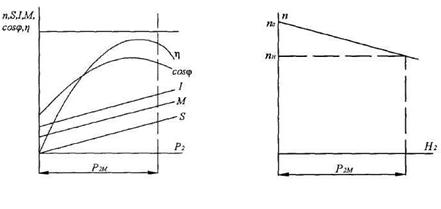
Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя называются зависимости коэффициента полезного действия η, коэффициента мощности  , подводимой мощности
, подводимой мощности  , тока
, тока  , момент на валу двигателя
, момент на валу двигателя  , скольжения S, частоты вращения
, скольжения S, частоты вращения  от значения полезной мощности
от значения полезной мощности  на валу двигателя при постоянном напряжении и частоте тока в сети (рис.6).
на валу двигателя при постоянном напряжении и частоте тока в сети (рис.6).
Зависимость  представляет собой кривую, весьма слабо наклонную к оси абсцисс. Скоростная характеристика мало отличается по форме от механической характеристики двигателя: она может быть названа жесткой.
представляет собой кривую, весьма слабо наклонную к оси абсцисс. Скоростная характеристика мало отличается по форме от механической характеристики двигателя: она может быть названа жесткой.
Зависимость  . При установившемся режиме работы
. При установившемся режиме работы  , где
, где  - полезный тормозной момент двигателя, а
- полезный тормозной момент двигателя, а  - момент х.х. Так как при изменении нагрузки в пределах от х.х. до ном. частота вращения асинхронных двигателей остается почти постоянной, то зависимость асинхронного двигателя почти прямолинейна; пересекает ось ординат в точке, соответствующей .
- момент х.х. Так как при изменении нагрузки в пределах от х.х. до ном. частота вращения асинхронных двигателей остается почти постоянной, то зависимость асинхронного двигателя почти прямолинейна; пересекает ось ординат в точке, соответствующей .
Коэффициент мощности  .
.
Асинхронный двигатель так же, как и трансформатор, потребляет из сети отстающий ток. Поэтому энергетические процессы, происходящие в асинхронном двигателе, характеризуют двумя величинами: активной мощностью  и реактивной мощностью QI
и реактивной мощностью QI
Соотношение между и QI: 
Коэффициент мощности асинхронного двигателя зависит от нагрузки на валу.
При х.х. машины, когда энергия расходуется только на покрытие небольших потерь в статоре и незначительных механических потерь, активная мощность дв.мала, а реактивная мощность велика, поскольку в машине при нормальном напряжении возбуждается вращающееся магнитное поле с максимальной величиной потока полюса. Поэтому при х.х. асинхронный двигатель имеет

С постепенным возрастанием нагрузки активная мощность увеличивается, а реактивная мощность практически остается постоянной, так как при неизменной амплитуде напряжения сети поток полюса основного поля сохраняет ту же величину, что и при х.х. Следовательно, с увеличением механической мощности двигателя его коэффициент мощности тоже возрастает. При нагрузке, близкой к номинальной  достигает наибольшего значения (0,75-0,95). Однако, при дальнейшем увеличении тормозного момента на валу, сопровождающемся снижением частоты вращения ротора и существенным ростом токов в обмотках статора и ротора, коэффициент мощности снижается, что объясняется усилением полей рассеяния и более быстрым ростом реактивной мощности по сравнению о активной мощности.
достигает наибольшего значения (0,75-0,95). Однако, при дальнейшем увеличении тормозного момента на валу, сопровождающемся снижением частоты вращения ротора и существенным ростом токов в обмотках статора и ротора, коэффициент мощности снижается, что объясняется усилением полей рассеяния и более быстрым ростом реактивной мощности по сравнению о активной мощности.
Поддержание высокого коэффициента мощности приобретает важное значение для экономического электроснабжения предприятий. В частности, нельзя допускать длительных х.х. асинхронного двигателя: если на отдельных станках нет работы, то двигатель отключают от сети. Далее, необходимо следить за тем, чтобы мощность устройства, приводимого в действие асинхронным двигателем, незначительно отличалась от номинальной мощности двигателя. Если при длительной работе асинхронного двигателя его средняя мощность не превышает 45% номинальной, то такой электродвигатель заменяют соответствующим двигателем мощности.
В тех случаях, когда работа двигателя при полной нагрузке сочетается с его работой со значительной нагрузкой, при которой становиться недопустимо низким, применяют специальные меры, обеспечивающие повышение коэффициента мощности. Для этого во время работы асинхронного двигателя со значительной нагрузкой /например, Р2<0,5 Р2Н/ снижают фазные напряжения на его статорной обмотке. Тем самым поток полюса вращательного поля, а, следовательно, и реактивная мощность машины будут уменьшены. Наиболее просто это достигается в двигателях, допускающих пересоединение фаз обмотки статора с  на Y и включаемых в сеть с линейным напряжением, равным номинальному фазному напряжению. Тогда при работе с нагрузкой, близкой к номинальной, фазы обмотки статора соед. , а при значительной недогрузке – Y. Это приводит к снижению фазного напряжения в
на Y и включаемых в сеть с линейным напряжением, равным номинальному фазному напряжению. Тогда при работе с нагрузкой, близкой к номинальной, фазы обмотки статора соед. , а при значительной недогрузке – Y. Это приводит к снижению фазного напряжения в  . Это пересоединение фаз обмотки статора обычно производится при помощи автоматического устройства. Двигатель, снабженный таким устройством, работает в широком диапазоне изменения нагрузки с близким к номинальному.
. Это пересоединение фаз обмотки статора обычно производится при помощи автоматического устройства. Двигатель, снабженный таким устройством, работает в широком диапазоне изменения нагрузки с близким к номинальному.
К.п.д. асинхронного двигателя
P1=P2+ΔPпотерь
Потери можно разделить на постоянные, практически не зависящие от нагрузки /потери стали сердечника статора, механические потери/, они определяются экспериментально из опыта х.х.; Переменные потери – потери на нагревание проводников статора и ротора
 ;
; 
и добавочные потери.
К.П.Д. двигателя достигает своего максимального значения /65-95%/, когда переменные потери равны постоянным. У большинства двигателей этот максимум к.п.д. имеет место примерно при нагрузке, равной 75% от номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.
При подготовке к работе повторить теоретический материал: принцип действия и устройство трехфазного асинхронного двигателя; понятие о скольжении; электромагнитный момент асинхронного двигателя; зависимость момента от скольжения; перегрузочная способность асинхронного двигателя; рабочие характеристики трехфазного асинхронного двигателя.
Программа работы.
1. Изучить принцип действия, устройство и назначение основных конструктивных элементов асинхронного двигателя (АД) с короткозамкнутым ротором.
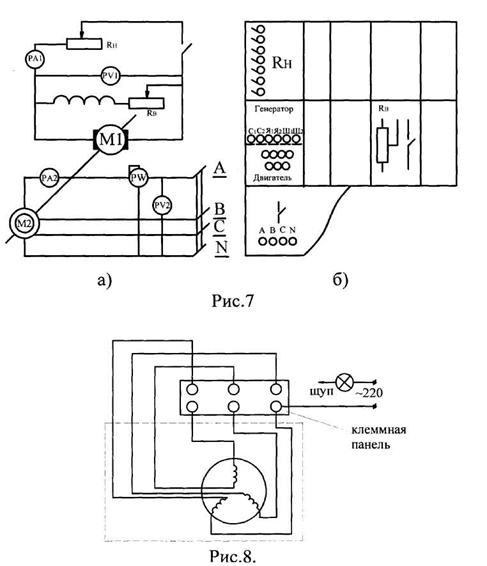
2. Ознакомиться со схемой испытания АД (рис.7) и со стендом лабораторной работы.
3. По паспортным данным вычислить момент, развиваемый двигателем, при номинальном режиме работы. Заполнить таблицу нижеприведенной форы.
| Паспортные данные двигателя | вычислено | ||||||
| UH, В | IН, А | РH, кВт | 
| nН, об/мин | 
| Схема соединения обмотки | МН, Н*м |
| «звезда» | |||||||
| «треугольник» |
4. Выполнить маркировку фаз статора АД, используя схемы рис.8 и рис.9.
5. Зная напряжение сети (UA=380В), обосновать выбор схемы соединения обмоток статора при номинальном режиме работы двигателя.
6. Собрать выбранный вариант схемы. Осуществить пуск двигателя без нагрузки. Измерить пусковой ток и ток холостого хода. Вычислить кратность пускового тока  при включении двигателя без нагрузки.
при включении двигателя без нагрузки.
7. Снять данные и построить рабочие характеристики двигателя и механическую характеристику.
8. Составить отчет и сделать заключение о проделанной работе.
Пояснения к работе.
1. С устройством двигателя следует ознакомиться по учебникам (1,2,3), плакату, стенду, слайдам на установке АВУ в лаборатории «Электрические машины».
2. Нагрузкой для двигателя М2 в данной работе служит генератор постоянного тока М1, связанный с двигателем механически: валы двигателя и генератора соединены жесткой муфтой.
Принципиальная схема лабораторной работы и общий вид стенда изображены на рис.7 а,б. на панель выведены концы и начала фазных обмоток статора.
4. Маркировка фаз статора – это определение начала и конца каждой из трех фаз обмоток статора. Неверное обозначение начал и концов фаз ведет к неправильному соединению обмоток и нарушению работы двигателя (не будет кругового вращающегося магнитного поля статора, т.к. нарушится пространственная симметрия магнитных потоков фаз).
Маркировка проводится в два этапа:
- определяется соответствия пар выводов каждой фазной обмотки статора;
- определяются начала А, В, С и концы X, Y, Z выводов фазных обмоток статора.
Для определения соответствующих пар выводов необходимо собрать схему рис.8, подав от сети один провод к любой из клемм, расположенных на клеммной панели АД, а другим проводом со щупом и индикаторной лампочкой касаться поочередно оставшихся клемм.
Из схемы рис.8 видно, что лампочка загорается, если провод и щуп подсоединены к выводам одной обмотки, ибо только в этом случае цепь будет замкнута. Аналогичным образом определяются пары выводов остальных обмоток.
Для определения начал и концов выводов фазных обмоток статора следует условно один из шести выводов принять за начало и обозначить символом А, а другой этой же фазы промаркировать символом Х. последовательно с выбранной фазой соединить любую из двух оставшихся фаз обмотки и подвести к ним напряжение сети. К выводам оставшейся обмотки третьей фазы присоединить вольтметр. В результате будет собрана схема рис.9а или рис.9б.
При согласном включении последовательно соединенных фазных обмоток, когда конец первой фазы соединен с началом второй (рис.9а), ось результирующего магнитного потока перпендикулярна плоскости обмотки третьей фазы потокосцепления с витками этой фазы максимально, и в третьей фазе наводиться Э.Д.С.  .
.
Если включение последовательно соединенных фазных обмоток окажется встречным, т.е. конец первой фазы будет соединен с концом второй фазы (рис.9.б), то ось результирующего магнитного потока совпадает с плоскостью третьей обмотки, потокосцепление с витками этой фазы почти равно нулю, и Э.Д.С. в третьей фазе практически отсутствует  .
.
Маркировка обмотки третьей фазы проводится аналогично (непромаркированную фазу для этого следует поменять в схеме местом с любой из немаркированных фаз).
5. ТОК в момент пуска  и ток при установленной частоте вращения ротора определяют на холостом ходу при невозбужденном генераторе. Прямой пуск АД с короткозамкнутым ротором малой и средней мощности, когда обмотка статора непосредственно присоединяется к номинальному напряжению трехфазной сети, сопровождается значительным начальным пусковым током
и ток при установленной частоте вращения ротора определяют на холостом ходу при невозбужденном генераторе. Прямой пуск АД с короткозамкнутым ротором малой и средней мощности, когда обмотка статора непосредственно присоединяется к номинальному напряжению трехфазной сети, сопровождается значительным начальным пусковым током  , превышающим начальный ток
, превышающим начальный ток  двигателя в 4-7 раз, а иногда и более. При этом на валу развивается начальный вращающий момент
двигателя в 4-7 раз, а иногда и более. При этом на валу развивается начальный вращающий момент  , составляющий от 1,2 до 2,2 номинального момента
, составляющий от 1,2 до 2,2 номинального момента  , что достаточно для разгона большинства устройств, пускаемых без нагрузки.
, что достаточно для разгона большинства устройств, пускаемых без нагрузки.
6. Регулируя сопротивление нагрузки генератора  , можно изменять момент на валу двигателя. Изменение момента двигателя вызывает изменение потребление тока из сети, мощности и частоты вращения.
, можно изменять момент на валу двигателя. Изменение момента двигателя вызывает изменение потребление тока из сети, мощности и частоты вращения.
Для построения рабочих характеристик снимают показания приборов, постепенно увеличивая шаг генератора (8-7 точек).
Первый отсчет по приборам делают в режиме х.х.  , последний – при полностью введенной нагрузке.
, последний – при полностью введенной нагрузке.
Результаты наблюдений сводят в таблицу:
| № | Измерено | Вычислено | |||||||||||
| Двигатель | Генератор | РГ, Вт | Р2, Вт | М, Н*м | S | f2, Гц | 
| 
| |||||
| UФ, В | IФ, А | РФ, Вт | n2, об/мин | UГ, В | IГ, А | ||||||||
Расчет величин, необходимых для построения рабочих характеристик
Подводимая к двигателю мощность  ;
;
Коэффициент мощности  ;
;
Полезная мощность на валу двигателя:
 , где
, где
 - мощность генератора постоянного тока,
- мощность генератора постоянного тока,
R – сопротивление обмоток якоря, дополнительных
полюсов,
R – измеряется после проведения всех опытов,
 - падение напряжения в щеточном контакте,
- падение напряжения в щеточном контакте,
 - потери в стали и механические потери в генераторе постоянного тока;
- потери в стали и механические потери в генераторе постоянного тока;
Коэффициент полезного действия  ;
;
Вращающий момент  Н∙м;
Н∙м;
Скольжение  ;
;
Частота тока ротора f2 = f1∙S.
По результатам вычислений строят рабочие характеристики n2(P2), S(P2), М(P2),I (P2), (P2), (P1).
Контрольные вопросы.
1. Объясните устройство, назначение основных конструктивных элементов и принцип действия асинхронного двигателя с короткозамкнутым ротором.
2. Почему сердечники статора набираются из отдельных изолированных друг от друга пластин магнитомягкого ферромагнитного материала?
3. как проводится маркировка выводов фазных обмоток статора?
4. Какие существуют схемы соединения обмоток статора? Чем обусловлен выбор той или иной схемы включения АД?
5. Почему пусковой ток асинхронного короткозамкнутого двиг7ателя больше тока при установившейся частоте вращения ротора?
6. Перечислите способы уменьшения пусковых токов асинхронных короткозамкнутых двигателей. Дайте им краткую характеристику.
7. Перечислите способы регулирования частоты вращения асинхронных короткозамкнутых двигателей. Дайте им краткую характеристику.
8. Как рассчитать номинальный момент асинхронного двигателя по его паспортным данным?
9. Как изменится вращающий момент асинхронного двигателя если напряжение на статорной обмотке уменьшится на 10%?
10. Что такое перегрузочная способность асинхронного двигателя?
11. Почему при недогрузке асинхронный двигатель работает с малым значением коэффициента мощности?
12. Как изменить направление вращения ротора асинхронного двигателя?
13. В чём сущность метода непосредственной нагрузки при исследовании асинхронного двигателя?
14. Какие характеристики асинхронного двигателя называются рабочими? Объясните характер полученных зависимостей.
15. Как влияет увеличение воздушного зазора между статором и ротором на ток холостого хода и асинхронного двигателя?







Date: 2015-07-22; view: 1497; Нарушение авторских прав