Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Модель структури системи
|
|
Далеко не завжди достатньо мати "ящик" зі всіма окремими його деталями. Потрібно ще й правильно з'єднати деталі між собою чи встановити між елементами певні зв'язки — відношення. Сукупність необхідних і достатніх для досягнення мети відношень між елементами системи називається структурою системи.
Отже, маємо друге означення системи: система — це сукупність взаємозалежних елементів, яка відокремлена від середовища та взаємодіє з нею як ціле. Це означення охоплює моделі "чорного ящика", складу та структури. Усі разом вони утворюють ще одну модель, яку називають структурною схемою системи; є також терміни "білий ящик", "прозорий ящик", а також "конструкція системи".
1.3.5. Динамічні моделі систем
Дотепер розглянуті варіанти системи можна вважати статичними моделями. Системи, у яких згодом відбуваються якісь зміни, називаються динамічними, а моделі, що відображають ці зміни — динамічними моделями систем.
Розрізняють два типи динаміки системи: її функціонування та розвиток. Функціонування — це процеси, що відбуваються в системі та її навколишньому середовищі, які стабільно реалізують фіксовану мету. Розвитком називається те, що відбувається з системою внаслідок зміни її цілей.
Система не завжди перебуває у фазах функціонування чи розвитку. Під час реконструкції одного цеху інші можуть функціонувати, а завод у цілому — розвиватися. Можливі й такі системи, для функціонування яких певні її підсистеми мають постійно розвиватися (наприклад, конструкторські бюро).
1.4. Штучні та природні системи
Одна з основних ознак системи — її структурованість, доцільність зв'язків між її елементами. Виникає запитання: на досягнення яких цілей спрямоване функціонування природних систем і, якщо такі цілі існують, то хто їх поставив?
Очевидно, що якщо мета, для досягнення якої існує система, невідома, то це ще не означає, що об'єкт перестає бути системою. Отже, можуть існувати системи з невідомими нам цілями чи будовою. Вивчаючи такі системи, потрібно насамперед пізнати об'єкт як систему, знайти її призначення (мету) або спосіб дії.
Існування штучних (створених людиною) і природних (що виникли в природі без участі людини) систем зумовлює розширення поняття мети.
Мету штучної системи означають як ідеальний образ бажаного результату її діяльності, тобто образ того, що мало б бути, здійснитися (частка "б" означає, що цілі бувають як здійсненні, так і нездійсненні). Такий ідеальний образ майбутнього стану системи та її навколишнього середовища називається суб'єктивною метою.
Уявімо, що минув термін, призначений на реалізацію суб'єктивної мети; система та її навколишнє середовище набули якогось реалізованого стану. У цей стан система потрапила об'єктивно, тобто в результаті реалізації об'єктивних закономірностей. Стосовно минулого моменту, коли результат ще тільки планувався, цей стан можна назвати об'єктивною метою системи. Інакше кажучи, майбутній стан системи — це його об'єктивна мета.
Отже, будь-який об'єкт можна розглядати як систему, проте лише з певного погляду, щодо конкретної мети.
1.5. Класифікації систем
Порівнюючи та розрізняючи системи, уважаючи одні з них однаковими, інші — різними, виконують їх класифікацію. Класифікація — це лише модель реальності. Якщо потрібно розрізняти системи одного класу, виокремлюють підкласи й отримують багаторівневу, ієрархічну класифікацію.
Щоб упорядкувати підходи до класифікації систем, скористаємося загальною схемою функціонування керованої системи (рис. 2), виокремивши систему S, керовану за допомогою керування U, і керувальну систему, що виконує це керування. Для реалізації керування U потрібно передбачити його наслідок, тобто потрібна модель усієї ситуації, за допомогою якої керувальна система визначає, яке керування подавати на вхід системи. Це ілюструє рис. 2, де схему зображено ще раз усередині керувального блока.

Рис. 2. Схема функціонування керованої системи
Схему функціонування керованої системи S слід читати так. Входи X складаються з двох частин: некерованої V та керувальної U; після перетворень у системі S входи X перетворюються на виходи У. Керувальну частину входів U виробляє керувальна система, на яку, у свою чергу, діють некеровані входи Vi і яка містить інформацію про керовану систему S. Крім того, до керувальної системи надходить інформація про виходи Y системи S, а також, можливо, — про некеровані входи V (цю можливість на рис. 2 зображено штриховими стрілками).
1.5.1. Класифікація систем за їх походженням
Зобразимо класифікацію систем за їх походженням (рис. 3). Повнота класифікації першого рівня логічно зрозуміла. Вона містить штучні, змішані та природні системи. Штучною називають систему, створену людиною як засіб досягнення поставленої (суб'єктивної) мети, а природною — систему, що виникла в природі в результаті спонтанних процесів без участі людини (або систему — засіб досягнення об'єктивної мети).
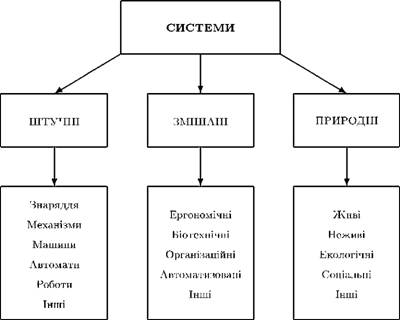
Рис. 3. Класифікація систем за їх походженням
Другий рівень класифікації неповний через незавершений розвиток багатьох систем, описаних на першому рівні. Означимо деякі терміни, використовувані на другому рівні класифікації систем за їх походженням.
Механізм — це засіб, який людина використовує для підвищення ефективності роботи.
Автомат (від гр. automates — той, що сам діє) — це пристрій (сукупність пристроїв), що за заданою програмою без особистої участі людини виконує всі операції в процесах одержання, перетворення, передачі та розподілення (використання) енергії, матеріалів або інформації. Програму автомата може бути задано в його конструкції (годинник, торговий автомат) або ззовні — за допомогою перфокарт, магнітних або оптичних носіїв тощо (ЕОМ, верстат із програмним керуванням), копіювальними чи моделювальними пристроями (аналогова обчислювальна машина, система стеження, інтерполятор).
Автоматизація — це застосування технічних засобів, економіко- математичних методів і систем керування, які частково чи цілком звільняють людину від особистої участі в процесах одержання, перетворення, передачі та використання енергії, матеріалів або інформації. Можна автоматизувати такі процеси:
• технологічні, енергетичні, транспортні й інші;
• проектування складних агрегатів, суден, промислових споруд, виробничих комплексів;
• організацію, планування та керування в цеху, на підприємстві, будівництві, в області, у військовій частині, з'єднанні тощо;
• наукові дослідження, медичне й технічне діагностування, облік і обробку статистичних даних, програмування, інженерні розрахунки тощо.
Мета автоматизації — підвищити продуктивність і ефективність праці, поліпшити якість продукції, оптимізувати управління, звільнити людину від роботи в умовах, небезпечних для здоров'я. Автоматизація — один з основних напрямків науково-технічного прогресу.
Робот — це автоматичний програмно-керований маніпулятор, що виконує робочі операції зі складними переміщеннями в просторі.
Ергономіка (від гр. ergon — робота й nomos — закон) — галузь науки, що вивчає людей і їх діяльність на виробництві з метою вдосконалювання знарядь, умов і процесу роботи. Основний об'єкт дослідження ергономіки — системи "людина — машина"; метод дослідження — системний підхід.
Біотехнічна система — це сукупність взаємопов'язаних і взаємозалежних біологічних і технічних систем чи об'єктів.
Організаційна система складається з людських колективів, що мають потрібні засоби для досягнення мети.
Екологічна система (від гр. oikos — житло, місцеперебування) — це єдиний природний комплекс, утворений живими організмами й середовищем їх проживання (атмосферою, ґрунтом, водоймою тощо), у якому живі та неживі компоненти пов'язані між собою обміном речовини й енергії. Поняття екосистеми застосовне до природних об'єктів різної складності та розмірів: океану чи невеликого ставка, тайги чи ділянки березового гаю.
1.5.2. Класифікація систем за описом змінних
Наведемо трирівневу класифікацію систем за типом вхідних (X), вихідних (Y) і внутрішніх (Z) (якщо опис виконано не на рівні "чорного ящика") змінних (рис. 4). На другому рівні класифікації систем із якісними змінними розрізняють випадки, коли систему описано засобами природної мови, і випадки, коли формалізація глибша. Другий рівень класифікації систем із кількісними змінними відображає відмінності методів дискретної та неперервної математики. Для систем зі змішаним описом другий рівень являє собою об'єднання класів двох перших гілок. Третій рівень однаковий для всіх класів другого рівня.
Дамо означення термінів, використаних на рис. 4.
Змістовним називають найзагальніший словесний опис без конкретних характеристик (наприклад, "тварина"); формалізованим — опис із зазначенням конкретних загальновідомих якісних характеристик (наприклад, "змінна належить до класу хижих тварин").
Тепер означимо типи змінних:
• дискретними називаються такі змінні, множина можливих значень яких зліченна (наприклад, дні тижня, поштучна кількість чого-небудь);

Рис. 4. Класифікація систем за описом змінних
• неперервними — змінні, множина можливих значень яких незліченна (наприклад, довжина, маса);
• детермінованими — змінні, значення яких можливо передбачити до проведення експерименту:
• стохастичними — змінні, для яких можна знайти ймовірнісний розподіл, тобто до експерименту ми не знаємо, якого значення набуде змінна, але знаємо, з якою ймовірністю вона може набути значення з якоїсь множини;
• розмитими — змінні, належність яких до певного класу залежить від додаткових наперед не відомих умов (наприклад, в одних випадках високою можна вважати людину, зріст якої більше 180 см, а в інших — більше 200 см, наприклад у баскетболі).
1.5.3. Класифікація систем за типом їх операторів
Розглянемо класифікацію систем за типом їх операторів, тобто класифікацію типів зв'язків між вхідними та вихідними змінними (рис. 5).
На першому рівні розміщено класи систем, що відрізняються ступенем відомості оператора S. Класифікації наступних рівнів для "чорного ящика" немає: оператор S уважають узагалі невідомим, тобто невідомо, як вхідні дані перетворюються у вихідні.
Якщо інформація про оператор S настільки загальна, що модель неможливо звести до параметризованого функціонального вигляду (наприклад, такого: "функція Y = S(X) неперервна, монотонна тощо"), то система непараметризована.
Якщо наші знання про оператор S дають змогу застосувати параметричну модель, тобто записати залежність y(t) від x(t) явно з точністю до скінченної кількості параметрів в = (9\, 62, ■ ■ ■, вп): y(t) = S(x(-),6), то система параметризована.
Нарешті, якщо й ці параметри задано точно, то будь-яка невизначеність зникає, і ми маємо систему з цілком визначеним оператором, тобто "білий ящик".
Подальші рівні класифікації подано на рис. 5 лише для останніх двох класів систем. Означимо терміни другого, третього та четвертого рівнів:
• інерційним (із пам'яттю) називається оператор, який враховує залежність від історії системи, а не то оператор називають безінерційним (без пам'яті);
• замкненим (зі зворотним зв'язком) називається оператор, який залежить не лише від входів системи, а й від її виходів, тобто замкнений оператор ураховує вихідну інформацію системи, а не то оператор називають розімкненим;

Рис. 5. Класифікація систем за типом їх операторів
• лінійним називають оператор, який перетворює вхідні дані на вихідні за лінійним законом, тобто степінь вхідних даних у кожному з доданків такого перетворення дорівнює одиниці, а не то оператор називають нелінійним;
• квазілінійним (від лат. quasi — ніби, нібито) називають оператор, характеристики якого максимально наближені до характеристик лінійного оператора, але не лінійні. Зазвичай за допомогою квазілінійних операторів спрощують нелінійну залежність, коли таке спрощення зумовлює мінімальні втрати інформації про об'єкт.
1.5.4. Класифікація систем за способом керування
Перший рівень класифікації систем за способом керування показує, чи входить до системи керувальний пристрій (рис. 6).

Рис. 6. Класифікація систем за способом керування
Другий рівень містить чотири основні типи керування, які різняться ступенем відомості траєкторії, що приводить систему до мети, і можливості керувальної системи утримувати керовану систему на цій траєкторії.
I тип: траєкторія та правильне керування Uq(t) відомі. Тоді можна не звертати уваги на розвиток подій. Такий тип керування називають керуванням без зворотного зв'язку.
II тип: процеси на некерованих входах Vq (t) відрізняються від передбачених раніше чи дія неврахованих входів виявляється істотною, і система "сходить із потрібної траєкторії". Потрібна інформація про поточну траєкторію y{t), а також додаткове керування для повернення виходів системи на потрібну траєкторію yo(t). Такий спосіб керування називається регулюванням. Приклад регулювання в біології — рефлекси.
III тип: неможливо задати опорну програмну траєкторію на весь період часу чи відхилення від неї настільки велике, що неможливо повернутися до неї. Керування полягає в підстроюванні параметрів системи доти, доки траєкторія y(t) не перетне цільову область.
IV тип: мета для даної системи недосяжна. Тоді змінюють структуру системи в пошуках такої, щоб можна було потрапити в цільову область. Отже, виконують перебір різних систем з однаковими входами X. Таке керування називається структурною адаптацією.
1.5.5. Класифікація систем за ступенем ресурсної забезпеченості керування
Щоб керувальна система могла виконувати свої функції, потрібна модель керованої системи, на якій досліджують різні типи керування. Для того щоб модель "запрацювала", чи була актуалізована, треба витратити ресурси: потрібно не тільки втілити модель у якомусь реальному вигляді, але й забезпечити отримання рішення потрібної якості й у потрібний момент часу.
Наявні ресурси не завжди дають змогу повністю виконати ці умови, тому виникають принципово різні ситуації залежно від ступеня забезпеченості керування ресурсами. Це відображено в класифікації систем на рис. 7.
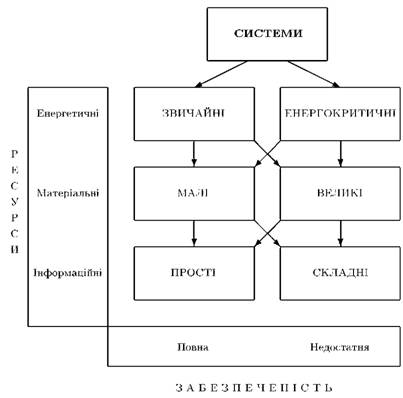
Рис. 1. Класифікація систем за ступенем ресурсної забезпеченості керування
Розглянемо енергетичні витрати на актуалізацію моделі й організацію керування. Зазвичай вони дуже малі порівняно з кількістю енергії, споживаної чи вироблюваної в керованій системі, тому їх просто не беруть до уваги. Однак виникають ситуації, коли, по-перше, керувальна та керована системи живляться від одного обмеженого джерела енергії, і, по-друге, енергоспоживання обох систем має однаковий порядок: виникає нетривіальний клас задач про найкращий розподіл енергії між ними. Такі задачі доводиться розв'язувати не часто, але у відповідальних випадках (наприклад, енергоємні задачі для автономних систем, зокрема космічних апаратів або дослідницьких роботів).
Системи, моделювання яких проблематичне внаслідок їх великої розмірності, називаються великими.
Перевести великі системи в розряд малих можна двома способами:
1) розробити потужніші обчислювальні засоби;
2) розкласти багатовимірну задачу на сукупність зв'язаних задач меншої розмірності (якщо природа системи дає змогу зробити це).
Складною називається система, у моделі якої бракує інформації для ефективного керування. Отже, властивість простоти чи складності — це відношення між керованою та керувальною системами чи між системою та її моделлю.
Зробити складну систему простою можна двома способами:
1) з'ясувати конкретну причину складності, одержати інформацію, якої бракувало, і включити її в модель — основне завдання науки й пізнання взагалі та системного аналізу зокрема;
2) змінити мету (у технічних системах це зазвичай неефективно, але у відносинах між людьми може бути єдиним виходом).
Щоб було зрозуміліше, чим різняться великі та складні системи, зазначимо можливі чотири варіанти систем:
• малі прості;
• малі складні;
• великі прості;
• великі складні.
Наведемо приклади систем усіх видів (у тому самому порядку):
• справні побутові прилади (праска, годинник, телевізор тощо) — для користувача; несправні — для майстра; шифрозамок — для власника сейфа;
• несправний побутовий прилад — для користувача;
• шифрозамок — для викрадача (проста тому, що достатньо лише перебрати всі варіанти, і велика тому, що для відкриття сейфа може не вистачити часу на перебір варіантів); точний прогноз погоди
на наступний день; повний міжгалузевий баланс (його визначають із затримкою на роки);
• мозок; економіка; живий організм.
1.6. Ієрархія систем
Поняття ієрархії досить важливе. Його застосовують тоді, коли потрібно впорядкувати системи відповідно до різних категорій, одна з яких має враховувати ступінь складності функцій компонентів системи.
У спрощеному вигляді ієрархію систем можна подати за допомогою таких рівнів.
1. Неживі системи:
• статичні структури, які називають кістяками-,
• прості динамічні структури із заданим рухом, притаманні навколишньому фізичному світу; їх називають часовими механізмами;
• кібернетичні системи з керованими циклами зворотного зв'язку; їх називають термостатами.
2. Живі системи:
• відкриті системи із самозбережною структурою; рівень клітин — це перший ступінь, на якому можливий поділ на живе та неживе;
• живі організми з низькою здатністю сприймати інформацію, наприклад рослини;
• живі організми з більш розвинутою здатністю сприймати інформацію, але без "самосвідомості"; до цієї категорії належать тварини;
• люди з їхньою самосвідомістю, мисленням і нетривіальною поведінкою;
• соціальні системи та соціальні організації;
• трансцендентні системи, поки що не пізнані людьми.
Організація — це (принаймні, частково) самокерована система,
що має такі характеристики:
• сутність: це система типу "людина — машина";
• структура: організація має бути здатна обирати напрями діяльності, відповідальність за яку може бути розподілена між її елементами на основі їх функцій, розміщення чи інших ознак;
• комунікація: у визначенні поведінки та взаємодії підсистем в організації важливу роль відіграє комунікація;
• вибір рішень: учасники повинні розподілити між собою завдання та напрями діяльності.
Список літератури
Чорней Н. Б. Теорія систем і системний аналіз: Навч. посіб. для студ. вищ. навч. закл. / Н. Б. Чорней, Р. К. Чорней. – К.: МАУП, 2005. – 256 с.: іл.. – бібліогр.: с. 224-236.
Date: 2015-07-17; view: 839; Нарушение авторских прав